
异步测时矿井人员精确定位方法的应用研究
2019-09-20 09:33刘兆琦田丰
价值工程 2019年23期
关键词:精确定位
刘兆琦 田丰
摘要:异步测时技术在实际应用中,只需要测量分站收发信号的时间就可以计算出矿井人员的准确定位,避免在测量中受到地下地形以及信号强弱等问题的干扰。因此,本文针对异步测时矿井人员精确定位方法应用展开分析和探究。
Abstract: In the practical application, the asynchronous time measurement technology only needs to measure the time of sending and receiving signals of the substation to calculate the accurate positioning of the mine personnel, and avoid the interference of the underground terrain and signal strength in the measurement. Therefore, this paper analyzes and explores the application of the precise positioning method for asynchronous time measurement mine personnel.
关键词:异步测时;矿井人员;精确定位
Key words: asynchronous time measurement;mine personnel;precise positioning
中图分类号:TD76 文献标识码:A 文章编号:1006-4311(2019)23-0149-02
0 引言
传统的矿井人员定位系统经常会受到各个方面因素的影响而无法达到精确定位的要求,而异步测时技术则彻底的解决了这一难题。在这一技术中,只需要分站信号收发时间就可以进行测距,计算出矿井人员的准确位置。因此值得在当前的煤矿行业中广泛应用。
1 矿井人员定位方法
1.1 矿井人员定位技术的发展
当前我国煤矿行业发生的安全事故主要是由于在矿井中可能出现的瓦斯等易燃物质引发爆炸造成的,根据近几年的事故案件的数据来看,发生火灾以及瓦斯爆炸等情况出现的伤亡人数与在矿井中工作的人数是有直接关系的,在矿井中工作的人数越多,出现事故伤亡的人数也就越多。因此从实际的事故案件中可以看出,在煤矿工作中需要有效的控制矿井中的工作人员数量,降低事故发生时的伤亡人数[1]。这就需要在工作中在矿井人员身上安装准确的定位设备,实时测量矿井中工作人员的数量,严禁矿井超员、矿井人员进入为危险区域等。同时也需要对矿井人员进行有效管理,但是由于矿井人员在工作中往往都会在距离地面较远的位置,有的矿井工作位置距地面有十多公里。这种情况下就需要对矿井人员的定位设备有更高的要求。在过去的煤矿行业中,矿井人员的定位设备主要使用RFID技术。但是这种技术功能十分单一,只能掌握矿井人员的读卡信息,是否通过检测站,但不可以确定矿井人员的距离数据,也无法准确定位,无法满足当前煤矿高中安全作业的客观需求[2]。
为提供煤矿行业安全作业的要求,人们不断研发新的矿井人员定位设备,例如AOA定位技术(Angle of Arrival)、SDS—TWR定位技术(Symmetric Double—Sided Two—Way Ranging)、RSSI定位技术(Received Signal Strength Indicator)、TOA定位技术(Time Of Arrival)、TWR定位技术(Two—Way Ranging)、TDOA定位技术(Time Difference Of Arrival)[3]。
1.2 矿井人员定位技术的介绍
1.2.1 RSSI定位技術
这是一种结合无线信号强弱程度来进行定位的技术,通过检测器材对特定设备发出的信号进行检测,分析其信号的强弱程度,进而可以计算出发出信号的设备与测量地点之间的距离。这一定位技术的核心取决于信号发射能力以及信号接收设备的灵敏程度。但是在实际的使用中发现设备发出的信号很容易受到矿井中巷道及其支护的影响,此外矿井中的一些导体和设备等也都会对设备发出的信号产生阻碍,因此RSSI定位技术的误差较大,不适应用于矿井人员的精确定位[4]。
1.2.2 AOA定位技术
AOA定位技术是通过测量角度的原理来进行定位。在这一技术中将设置两个检测点作为检测分站,进而通过测量定位卡与分站之间的角度来计算定位距离。但是这种技术只能用于没有阻碍的直线位置上,定位过程中如果出现拐弯、障碍物以及倾斜角度等,都会对定位的精度产生影响,因此不适应用于矿井人员的精确定位。
1.2.3 TOA定位技术
这种技术是根据设备发送接收信号的时间来计算定位距离。当矿井人员身上的设备发送信号后,测量设备会接收到信号,而通过从信号发送到接收的时间以及信号正常的传输速度就可以计算出矿井人员与测量地点之间的距离[5]。
这种定位技术与其他传统的定位技术不同,其技术核心在于信号传输的时间,而对于信号强弱没有严格的要求,因此定位设备发射信号的功率以及测量设备的灵敏程度都不会对定位精度产生影响。这种技术虽然可以用于矿井人员的精确定位,但是也有着不足之处。由于这一技术对信号发送和接收的时间精度要求很高,因此需要及其精密的时间测量仪器,进而技术使用成本也大大增加。
2 异步测时技术
2.1 异步测时技术的概述
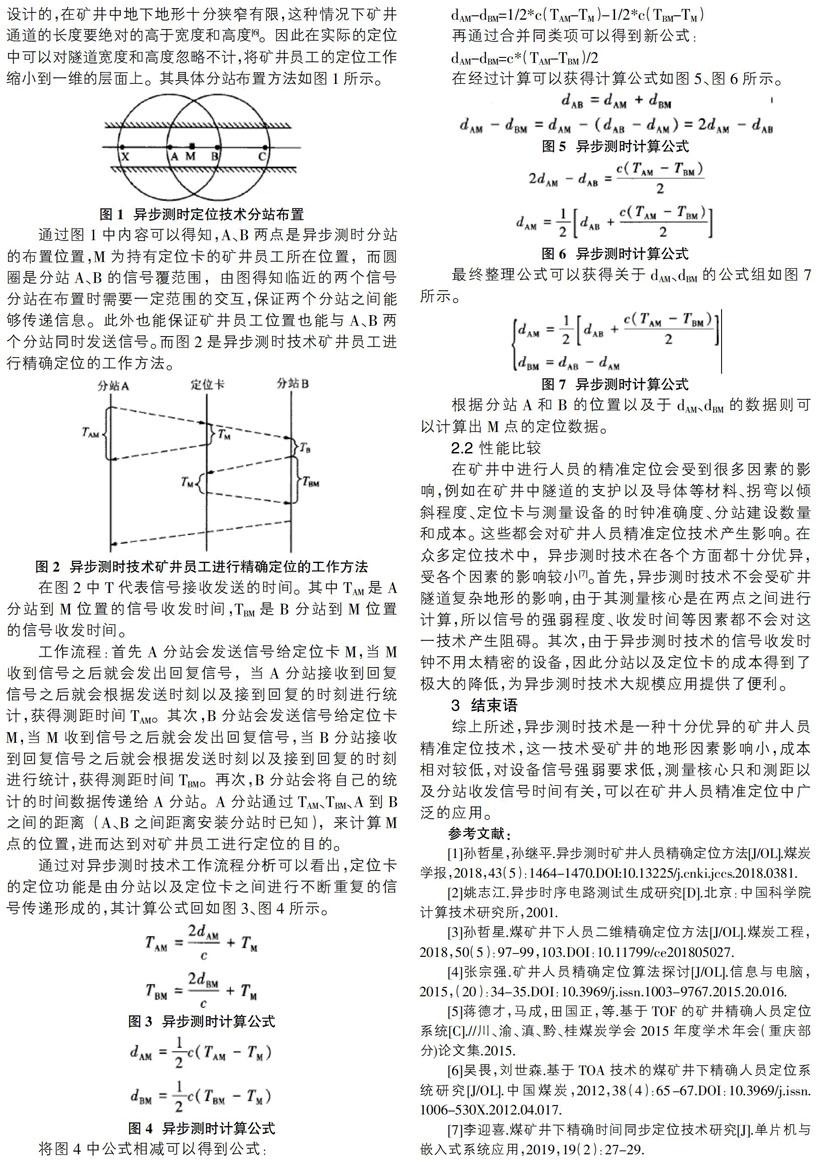
异步测时定位技术是根据煤矿行业矿井实际工作环境设计的,在矿井中地下地形十分狭窄有限,这种情况下矿井通道的长度要绝对的高于宽度和高度[6]。因此在实际的定位中可以对隧道宽度和高度忽略不计,将矿井员工的定位工作缩小到一维的层面上。其具体分站布置方法如圖1所示。
通过图1中内容可以得知,A、B两点是异步测时分站的布置位置,M为持有定位卡的矿井员工所在位置,而圆圈是分站A、B的信号覆范围,由图得知临近的两个信号分站在布置时需要一定范围的交互,保证两个分站之间能够传递信息。此外也能保证矿井员工位置也能与A、B两个分站同时发送信号。而图2是异步测时技术矿井员工进行精确定位的工作方法。
在图2中T代表信号接收发送的时间。其中TAM是A分站到M位置的信号收发时间,TBM是B分站到M位置的信号收发时间。
工作流程:首先A分站会发送信号给定位卡M,当M收到信号之后就会发出回复信号,当A分站接收到回复信号之后就会根据发送时刻以及接到回复的时刻进行统计,获得测距时间TAM。其次,B分站会发送信号给定位卡M,当M收到信号之后就会发出回复信号,当B分站接收到回复信号之后就会根据发送时刻以及接到回复的时刻进行统计,获得测距时间TBM。再次,B分站会将自己的统计的时间数据传递给A分站。A分站通过TAM、TBM、A到B之间的距离(A、B之间距离安装分站时已知),来计算M点的位置,进而达到对矿井员工进行定位的目的。
通过对异步测时技术工作流程分析可以看出,定位卡的定位功能是由分站以及定位卡之间进行不断重复的信号传递形成的,其计算公式回如图3、图4所示。
将图4中公式相减可以得到公式:
dAM-dBM=1/2*c(TAM-TM)-1/2*c(TBM-TM)
再通过合并同类项可以得到新公式:
dAM-dBM=c*(TAM-TBM)/2
在经过计算可以获得计算公式如图5、图6所示。
最终整理公式可以获得关于dAM、dBM的公式组如图7所示。
根据分站A和B的位置以及于dAM、dBM的数据则可以计算出M点的定位数据。
2.2 性能比较
在矿井中进行人员的精准定位会受到很多因素的影响,例如在矿井中隧道的支护以及导体等材料、拐弯以倾斜程度、定位卡与测量设备的时钟准确度、分站建设数量和成本。这些都会对矿井人员精准定位技术产生影响。在众多定位技术中,异步测时技术在各个方面都十分优异,受各个因素的影响较小[7]。首先,异步测时技术不会受矿井隧道复杂地形的影响,由于其测量核心是在两点之间进行计算,所以信号的强弱程度、收发时间等因素都不会对这一技术产生阻碍。其次,由于异步测时技术的信号收发时钟不用太精密的设备,因此分站以及定位卡的成本得到了极大的降低,为异步测时技术大规模应用提供了便利。
3 结束语
综上所述,异步测时技术是一种十分优异的矿井人员精准定位技术,这一技术受矿井的地形因素影响小,成本相对较低,对设备信号强弱要求低,测量核心只和测距以及分站收发信号时间有关,可以在矿井人员精准定位中广泛的应用。
参考文献:
[1]孙哲星,孙继平.异步测时矿井人员精确定位方法[J/OL].煤炭学报,2018,43(5):1464-1470.DOI:10.13225/j.cnki.jccs.2018.0381.
[2]姚志江.异步时序电路测试生成研究[D].北京:中国科学院计算技术研究所,2001.
[3]孙哲星.煤矿井下人员二维精确定位方法[J/OL].煤炭工程,2018,50(5):97-99,103.DOI:10.11799/ce201805027.
[4]张宗强.矿井人员精确定位算法探讨[J/OL].信息与电脑,2015,(20):34-35.DOI:10.3969/j.issn.1003-9767.2015.20.016.
[5]蒋德才,马成,田国正,等.基于TOF的矿井精确人员定位系统[C].//川、渝、滇、黔、桂煤炭学会2015年度学术年会(重庆部分)论文集.2015.
[6]吴畏,刘世森.基于TOA技术的煤矿井下精确人员定位系统研究[J/OL].中国煤炭,2012,38(4):65-67.DOI:10.3969/j.issn.1006-530X.2012.04.017.
[7]李迎喜.煤矿井下精确时间同步定位技术研究[J].单片机与嵌入式系统应用,2019,19(2):27-29.
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
电源技术(2015年2期)2015-08-22
第二课堂(小学版)(2015年4期)2015-06-18
地震研究(2014年4期)2014-02-27
