输电线路带电作业机器人的电磁分析与防护设计
2019-09-10 07:22:44李涛程旭赵建辉
科学导报·科学工程与电力 2019年24期
关键词:输电线路
李涛 程旭 赵建辉

【摘 要】输电线路带电作业机器人内有许多的电磁敏感元件,在具有复杂电磁环境的输电线路上无法稳定工作,因此对输电线路带电作业机器人进行电磁分析与防护设计是保证机器人可靠工作的必要条件。
【关键词】输电线路;带电作业机器人;电磁分析;防护设计
1国内外研究现状
目前国内外带电作业机器人主要采用两种模式:一是操作员随绝缘斗在空中直接在电缆旁操作机器臂完成带电作业;二是操作员在地面,机器臂随高空云台升入作业现场,操作员通过监视器观察高空现场情况,操控机器臂进行带电作业。由于第一种模式操作员仍然需要在空中电缆旁进行操作,存在触电风险;目前的带电机器人研发主要集中在第二种模式,即操作员在地面对空中的机器臂进行遥操作的方式。
2输电线路带电作业机器人本体结构
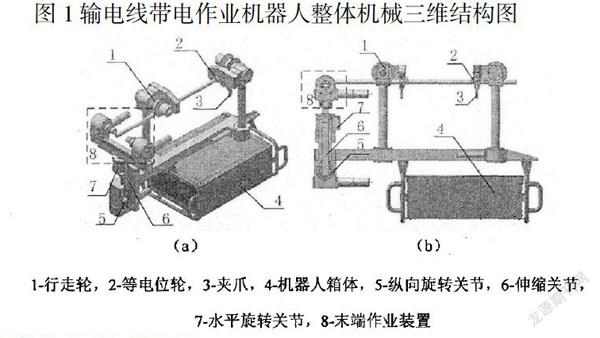
高压输电线路由架空地线、输电导线、绝缘子串、防振锤等金具组成。架空地线一般位于杆塔的最上方,起到整个输电线路的避雷作用。输电线路长期在露天环境下不间断运行,受暴风、雨雪、烈日等各种极端天气的侵蚀,极易导致耐张线夹处螺栓松动,输电线路疲劳损伤的线路问题,影响供電可靠性。根据输电线路作业环境,本实验团队对输电线路机器人整体机械结构进行设计,得到机器人三维本体结构图如图1所示。机器人主要包括机器人箱体,夹爪,机械臂,行走轮,作业末端等部件。通过两个行走轮在输电线上行走,为保证机器人在输电线路上平稳运行,每个行走轮处都装配夹爪。
3机箱的电磁防护设计
3.1电磁场防护标准
查阅资料发现国内外尚未有关于带电作业机器人电磁场防护的标准,只有一些国家和国际组织针对工频电磁场公众暴露建立了自己的限值。我国提出的以4kV/m电场强度和0.1mT磁感应强度作为公众、职业暴露限值比国外同类标准的要求要高,因此参照其作为机器人电磁场防护的限值。
3.2机箱的屏蔽
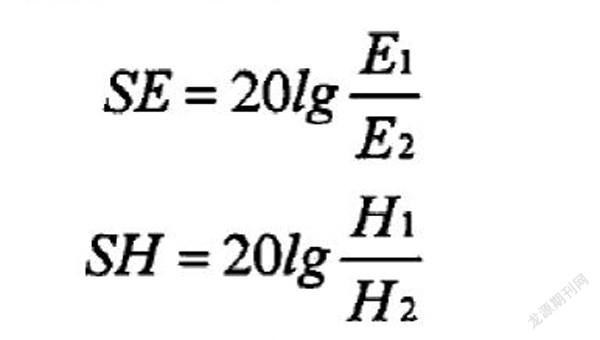
屏蔽是用导电或导磁材料将需要防护的区域封闭起来,以抑制电磁场由一个区域对另一个区域的感应和辐射,即切断电磁波辐射和场祸合的传输途径。电磁屏蔽按照屏蔽原理可分为电场屏蔽,磁场屏蔽和电磁场屏蔽。电场的高阻抗作用和磁场的低阻抗作用将分别对待。在屏蔽壳表面上的电场和磁场分布将根据散射理论或者简单的准静态场原理来处理。一旦外部场的分布求得,内部场的解就能计算出来。由于输电线路的工频电磁场很强,采用单个屏蔽体无法达到好的屏蔽效果,因此采用双层屏蔽结构。工程上常用屏蔽效能来表示屏蔽体对电磁骚扰的屏蔽能力,屏蔽效能的表达式如式1、2所示:
E1:被测设备未进行屏蔽时测得的电场强度,kV/m;
E2:被测设备采取屏蔽措施后测得的电场强度,kV/m;
SE:电场屏蔽效能,dB;
H1:被测设备未进行屏蔽时测得的磁场强度,A/m;
H2:被测设备采取屏蔽措施后测得的磁场强度,A/m;
SH:磁场屏蔽效能,dB。
用传输线理论来解释电磁场屏蔽的原理。假设有一电磁波射向厚度为d的金属导体表面,当电磁波到达金属导体的第一个表面时,由于阻抗的变化,部分电磁波被导体反射,剩下的部分电磁波会进入导体,在金属导体内进行传播时,能量会不断地衰减,当电磁波到达第二个表面时,又会发生反射,只有小部分的电磁波会穿过第二表面进入被屏蔽物体内。在第二表面上被反射的电磁波再次回到第一表面时将又会产生反射,如此反复循环,直到所有能量耗尽。由此可见,金属屏蔽体对电磁波的屏蔽效果包括刚进入导体时被金属导体第一个表面反射电磁波能量的反射损耗R、在金属导体内外两个表面之间产生多次反射的多次反射损耗B、在金属良导体内传播衰减时产生的吸收损耗A。当屏蔽体的金属较厚或电磁波频率较高时,当A>10dB时,导体的吸收损耗远大于多次反射损耗,多次反射损耗可忽略不计。
4控制系统的电磁防护设计
4.1CAN总线抗干扰
提高CAN总线抗干扰能力,保证CAN信号的质量的方法有:(1)为避免地回流烧毁电路板、限制干扰的幅度,保护控制器不被烧毁,需在CAN接口处设置隔离并添加浪涌保护电路。致远电子的CTM8251AT模块不仅具有可以将CAN控制器的逻辑电平转换为CAN总线差分电平的功能,还能将CAN控制器与CAN总线之间隔离开来,隔离电压达DC2500V,并在CAN总线上设有防浪涌保护电路,因此选择该芯片作为CAN通信的芯片。(2)CAN总线为了提高抗干扰能力,采用CAN-H和CAN-L差分传输,即使遇到干扰,CAN-H与CAN-L由于受到的干扰相同,CAN-H与CAN-L的差值仍保持不变。为了保证CAN-H与CAN-L受到的干扰相同,必须使得CAN-H和CAN-L要紧密地靠在一起,否则受到的干扰强度就不一样,就会导致差分信号受到干扰。通常双绞线只有33绞/米,而在强干扰场合,要超过55绞/米才能达到较好的抗干扰效果。
4.2无线网桥抗干扰措施
提高无线网桥抗干扰的措施有:(1)无线网桥的通信频段为2.4G。输电线路上的频谱主耍在50Hz-4MHz之间,属于非同频干扰,影响较小。由于机器人处在强电磁场环境,天线上感应祸合的能量会很强,有可能会超过网桥自带滤波器的承载功率,使其烧毁。本文采取在网桥的信号端添加大承载功率的带通滤波器方式来解决该问题。带通滤波器的通频带为2400-2500MHz,最大承载功率为10W,可有效滤除带外信号、降低噪声,如图2所示为带通滤波器实物图。(2)天线的馈线直接穿过了机箱与无线网桥连接,为提高机箱的屏蔽效率,减少馈线与外部强电磁场的感应祸合,选用具有双屏蔽层衰减系数小的馈线,并用锡箔纸包裹馈线,使其与机箱连成一体;(3)为防止电源干扰,在网桥的电源输入端添加电源滤波器。
5结束语
为保证机器人稳定工作,本文以输电线路为例,首先分析了输电线路带电作业机器人的作业方式,然后基于等电位作业方式,从电磁干扰的三个要素出发,分析并计算了输电线路电磁干扰源的情况,通过机箱的屏蔽来抑制干扰的祸合路径,基于控制系统方面来提高机器人控制系统敏感源的抗干扰能力,仅供参考。
参考文献:
[1]吴轲,张建伟,华栋,崔佩仪.高压带电作业机器人的现状和发展[J].电子技术与软件工程,2018,09:97-98.
猜你喜欢
科学与财富(2016年26期)2016-12-01 21:27:59
中国新技术新产品(2016年22期)2016-11-29 05:33:48
中国新技术新产品(2016年22期)2016-11-29 05:23:01
企业技术开发·中旬刊(2016年10期)2016-11-12 16:58:56
企业技术开发·中旬刊(2016年10期)2016-11-12 15:13:52
中国科技博览(2016年22期)2016-11-01 18:19:47
中国科技博览(2016年19期)2016-10-19 13:11:05
科学与财富(2016年28期)2016-10-14 20:23:24
科学与财富(2016年28期)2016-10-14 04:19:29
科学与财富(2016年28期)2016-10-14 03:48:23