
基于热电偶的模糊加权解耦控制在多路温控器中应用研究
2019-09-10 07:35张鑫史超张壹胜胡鹏段可新
大众科学·上旬 2019年5期
张鑫 史超 张壹胜 胡鹏 段可新

摘 要:通过对模具温控装置的现状分析,设计了基于热电偶的模糊加权解耦控制的32路的温度控制系统,介绍了该系统的硬件结构、抗干扰设计、控制算法,并对控制精度进行了探讨。通过热电偶加权解耦来获得冷端补偿电位值,然后,将微机内和热电偶的实际的输出电位代数相加,通过热电偶加权解耦,可以换算该代数和实测温度。通过计算得到高精度的潜在温度值,然后根据潜在的温度值得到相应的温度值。因此,实现了实际线性,降低了放大器的温度漂移和非线性漂移的影响。研究结果显示,本文实际的系统具有结构简单、精度高、应用范围广的特点。
关键词:热电偶;温度控制;多路温控器;模糊加权解藕控制
1引言
近几年来,温度控制系统被人们广泛采用。以取代传统的模拟控制方法,以改进控制系统的绩效指标,并改进控制功能。由于需要确保温度的均匀性和测量点的数量,过去使用了多个微机控制系统,这反过来又导致了控制系统的复杂性、功能不便以及多个系统的分散控制问题[1]。温度常常是结构和参数的不确定性、重大延误和变量、难以获得准确的数学模型、在最需要的环境中使用传统方法往往无法达到预期的控制效果[2]。在大量热装置中,传感器被广泛用作温度传感器。但是,自动调温器与温度之间的非线性特征对应用产生了许多不利影响。虽然某些线性方法,例如绘制界线,但测量误差仍可视为热负荷的线性要素[4]。因而,发展多通道、正确的用户界面、温度的精准控制对于简化硬件设计并提高系统的准确性非常重要。微机电路用于监测生产,故障自诊断,同时控制多个温度控制区域。提出了一种算法简单、解耦效果好、适应参数变化的多变量模糊控制方法,应用于现代生产线,效果好。
2 整机结构及工作过程
硬件系统的块图如图1所示。从下图中可以看出,该系统由单芯片微型计算机、传感器、放大滤波器、键盘、液晶、温度补偿单元组成。该参数可以用标准偏差表示,可以用标准偏差的倍数或置信区间的半值宽度表示,所有的测定结果都有不确定度。系统中,温度传感器采用k分度号的热电偶,在0℃时输出电压为0,温度系数约为22μV/℃,通道选择由4片4051组成,扩展控制口、输出缓冲采用8255、7407,系统的执行单元采用固态继电器。但是,由于被控对象存在热惯性,将会导致被控对象的实际温度值在温度给定值附近出现上、下振荡现象。
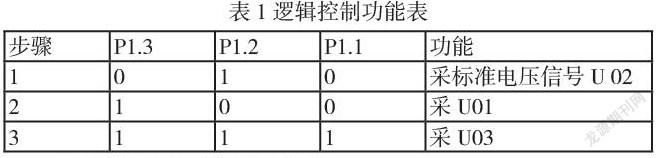
系统硬件工作原理是对温度传感器控制的工作台温度进行测量,所产生的微弱电压信号,经过冷端补偿前置放大、滤波,输出反馈信号。相反,试验中的热电偶为K,补偿电缆在直流直接电流后连接,直接测量热能量的动态,并使用热空气温度计算进行环境温度修正。表1说明了逻辑控制和数据收集过程。在表1的3个步骤之后,单芯片微型计算机计算并查看表的顶部,计算温度的精确值,输出串行端口数据,并按数字管显示,然后在下一个工作周期之间进行查看。温控装置的冷端暴露于工作环境中,因此,冷端温度可被认为符合操作环境的温度。驱动加热/冷却单元,使被控工作台稳定在用户从键盘输人的目标温度上,加热/冷却单元和被控工作台组成系统的被控对象,温度传感器、通道选择与前置放大组成反馈环节。
3软件抗干扰设计和控制算法
3.1 软件抗干扰设计
热电偶的温度系数比较小,信号弱,易受到各种干扰,经过过滤器后,干涉程度减少了一定程度,但仍然受到工频干扰、随机噪声的影响,软件设计必须进一步抑制干扰。一般情况下,两相流速测量系统的实验标定是比较困难的,必要时可采用激光多普勒技术或高速摄影技术来标定,但它们对管道流动系统有些特殊要求[5]。通过改变变压器的输出电压来调节管炉内的温度。差压计的精度为0.2,分辨率为0.03 mV。如果实验温度场在40至13摄氏度之间允许误差为±1.5°C或+0.70%,则信任度为96%。单片机内利用T1进行特殊触发,对偶然因素引起的随机干扰进行中值滤波,随机使用五次确定的中值过滤器来获得插值。
3.2 控制算法
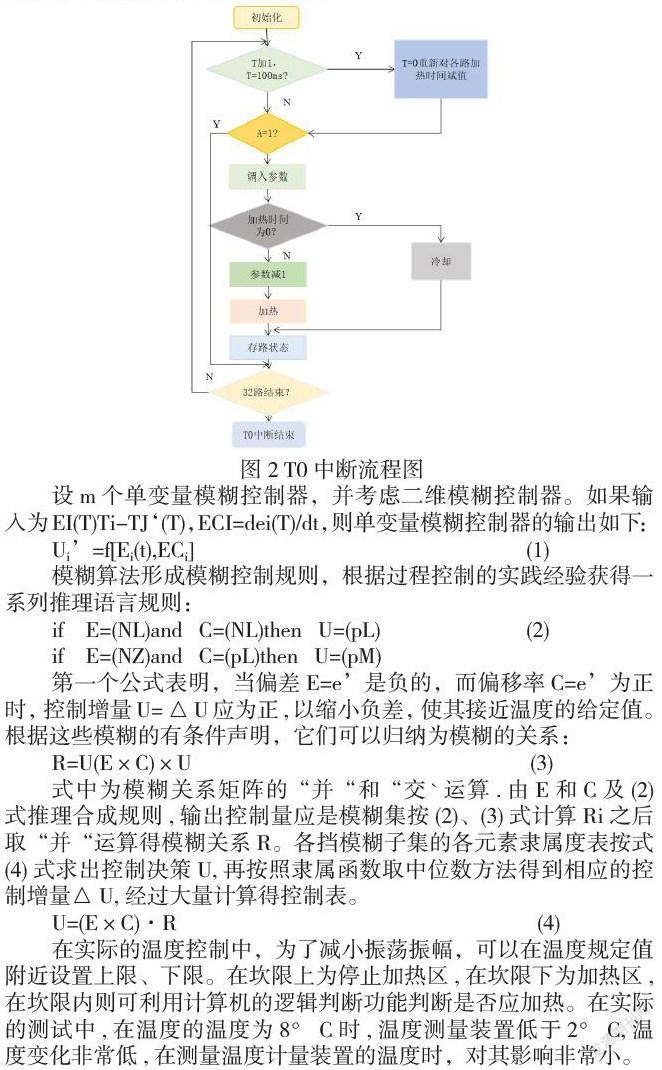
对于32种实时准确的测量,由于需要PID控制良好的人机对话界面,所以必然需要合理的控制算法。该控制算法的主流图表如图2所示。对于多路控制区,每段加热分别由区本身的输人量对其输出量起主要作用,其它变量可看作干扰量。要提高加热率,只需在一定的调整温度范围内调整服务周期即可。0状态表示恒定加热,2个状态表示恒定冷却,这两个状态的命令操作都直接在主中断程序中执行。因为数据的采集周期极短, 在一个数据采集周期内可以认为环境温度是恒定的, 即 AD590M 的输出电流 I 是恒定的。在1状态的T周期中,该周期为1状态,而不是下一个周期,其控制操作相对独立,与其他路径不干扰,控制误差也在1周期T以内,因此保证了路径控制操作的实时性。
在实际的温度控制中,为了减小振荡振幅,可以在温度规定值附近设置上限、下限。在坎限上为停止加热区,在坎限下为加热区,在坎限内则可利用计算机的逻辑判断功能判断是否应加热。在实际的测试中,在温度的温度为8°C时,温度测量装置低于2°C,温度变化非常低,在测量温度计量装置的温度时,对其影响非常小。
4 控制精度探讨
将测量的数组温度检测到热塑性时,会将前通道转换为一个电压信号,该信号对应于单芯片微型计算机的基准点电压(SV)的值。考虑到对单芯片微型计算机的采样需要,对热电偶而言,应线性放大。此处,电势输出范围为0-3000V,满足了采样和测量的要求。由于模具温度控制范围一般是O℃到4000℃之间,选用自带10位AD转换的单片机,则相对应的转换最大误差足够满足精度要求。而出现祸合现象后,通过对各通道调节量、被调量的仔细分析,采取适当的措施,可消除祸合带来的不利影响[6]。从控制测量角度来看,比较简单,而实际测量温度与温度值进行比较,低于实际温度,可以控制硅加热,以增加测量温度
在温度测定试验中,通常在常温常压环境下进行,标准温度计为0。因此,在實测实测数据取得测定数据后,通过计算、分析、处理测定的数据,以提高测定精度。首先选取适当的隶属度函数,基本论域、模糊集论域,再经过离散化后得到其赋值表。根据比较、逻辑判断结果设置加热或不加热标志,在同步信号产生后,计算机进入中断程序[7]。值越大,系统的不确定性就越大。之后,为了降低温度测量系统的不确定性,我们必须精确地选择热电偶,相反,即使选择了极高的热电偶,系统的不确定度未必是小的。如果在恒定温度过程中出现干扰,例如环境的突然变化,则恒定温度步骤的平衡将被打破。届时,系统将自动调整工作周期并恢复平衡[8]。
T周期太大,或过小,将影响热惯性、热平衡与冷却之间的平衡,而通路的整个生命周期都是30×25毫秒,而通路的测量周期为100毫秒。每个指令首先运行,然后在语句代碼中执行。在每次操作之前,必须对当前状态进行判断,直到命令允许接收该命令时为止。然后查询各路是否有加热标志,如有加热标志则对应的输出口置,并清加热标志,四路查完后,中断返回。在TO,T1和ADC中断中,T1的定时准确与否关系到测量精度,所以设其为中断优先级,TO和ADC中断为同级中断。多路温度控制器的输出为开关量输出,该开关根据模糊控制算法监控控制箱。形成两个直流34V控制交流330V通断的回路,进而接通或断开加热装置,实现了多路温度控制。
5 结论
本文设计的32通道温度控制器在使用中操作简单,温度控制系统方便、安全、可靠。结果表明,该系统的不确定性不仅与热电偶本身的容许误差有关,而且与构成系统的测量元件的重复性有关。该温控器开发以来,在模具温控上得到了很好的运用,提高模具生产的成品率,解决了温度不均匀的问题,使控制精度达到了±1度。由于对控制系统引入专家模糊 PID 控制,在曲线的两个拐点进行了“预前控制”,有效的克服了温度滞后带来的影响。其综合性能比以往的控制方法更完备,完全符合日常工作的要求。
参考文献
[1] 唐建敏, 吴来杰. 压铸模具实时温度监测系统研制[J]. 热加工工艺, 2017(03):123-124+128.
[2] 张临松, 王士军, 陈伟, et al. 塑料挤出机的多路温度控制系统设计[J]. 自动化与仪表, 2018, 33(11):34-37.
[3] 王利恒, 易金平, 王志航. 基于Web的分布式窑炉温控器设计[J]. 自动化与仪表, 2018, v.33;No.244(07):33-36+62.
[4] 程俊红.基于ARM的多路温度控制器的设计[J]. 网友世界, 2014(10):182-182.
[5] 徐立新,谢建斌,杨智伟,周富涛. 微细热电偶的制作与时间常数标定方法[J]. 电子测量与仪器学报(7期):1023-1028.
[6] 吴朋, 林涛. 基于QGA-SVM的铠装热电偶传感器辨识建模研究[J]. 仪器仪表学报, 2014, 35(2):343-349.
[7] 刘毅, 陈登权, 陈家林, et al. Ir和IrRh40合金热电偶丝的显微组织和力学性能研究[J]. 贵金属, 2014(3):40-44.
[8] 刘浩. 浅谈热电偶测温原理及应用[J]. 科技与企业, 2014(2):258-258.
猜你喜欢
科技资讯(2022年2期)2022-03-04
科学与生活(2021年19期)2021-10-30
电子乐园·上旬刊(2021年7期)2021-07-19
小学阅读指南·低年级版(2020年10期)2020-10-12
科学与财富(2018年19期)2018-08-20
科学与财富(2018年2期)2018-03-16
中国高新技术企业(2017年8期)2017-06-05
建筑建材装饰(2016年13期)2017-01-04
建筑建材装饰(2016年9期)2016-12-29
科技视界(2016年15期)2016-06-30
