一种适用于集装箱运输的新型AGV系统设计
2019-09-10 02:38邓烨峰
现代信息科技 2019年17期
关键词:集装箱


摘 要:当前先进的集装箱自动化码头水平运输系统,主要以基于磁钉导航的AGV系统,来完成集装箱在码头前沿和堆场之间的自动化转运。该类AGV系统虽可靠性高,适用于码头复杂的作业环境,但同时要求码头在基础建设中铺设大量的磁钉,不利于传统码头的升级改造,具有局限性。本文设计了一种适用于集装箱运输的新型AGV系统,基于多传感器信息融合技术的导航技术,满足传统码头的建设需求。系统主要从AGV车体、控制系统架构、软件系统等多方面进行设计,使得产品具有显著的优越性、可行性和可实施性。
关键词:集装箱;自动化码头;AGV;导航技术
中图分类号:TH247 文献标识码:A 文章编号:2096-4706(2019)17-0148-04
Abstract:At present,the advanced horizontal transportation system of container automation wharf mainly uses AGV system guided by magnetic nails to complete the automatic transshipment of containers between the front of the wharf and the yard. The AGV system has high reliability and is suitable for complex working environment of wharf,but at the same time,it requires a large number of magnetic nails to be laid in the infrastructure of wharf,which has limitations and is not conducive to the upgrading and transformation of traditional wharf. In this paper,a new AGV system for container transportation is designed. The navigation technology based on multi-sensor information fusion technology meets the construction requirements of traditional terminals. The system is designed from the aspects of AGV line-controlled car body,control system architecture,software system and so on,which makes the product have remarkable advantages,feasibility and practicability.
Keywords:container;automation terminal;AGV;navigation technology
0 引 言
随着全球贸易的快速发展,港口码头在全球贸易发展中占据非常重要的地位,起到了货物中转和装卸的作用。集装箱码头是包括可以容纳集装箱装卸作业以及运输过程的具有明确边界的区域。近几十年来,贸易进出口量以约70%的增长率增长,海运贸易量占了三分之二。集装箱运输是连接海运和其他运输方式的桥梁。随着集装箱吞吐量的增加,船舶大型化不断发展,提高集装箱码头的核心竞争力尤为重要[1]。目前,自动化集装箱码头已经是全世界港口发展的方向,受到码头运营商的高度重视,对于我国集装箱港口,要提升港口竞争力,不断研究和发展自动化技术是一个非常关键的方向。集装箱AGV(Automated Guided Vehicle,自动导引运输车)是衔接码头前沿到堆场的重要环节,是集装箱码头作业效率、投资与营运成本、环境安全及吞吐能力的关键影响因素,因此探索一种适用于集装箱运输的新型AGV系统既可以用于新码头运行,也可以对传统的旧码头自动化升级改造,是一项非常具有现实意义的研究。
1 功能需求
由于AGV的作用是代替人工完成集装箱在码头前沿和堆场之间的集装箱卡车运输,同时考虑提高作业效率、降低生产成本等关键因素,所以必须具备以下一些基本的功能:(1)支持全天候运行,适应码头前沿特定区域自动化转运作业[2];(2)能适应并承载常见集装箱尺寸大小,满足20、2×20、40、45英尺标准集装箱装载,額定承载61t;(3)AGV集成基于激光雷达等多传感器信息融合技术的自动驾驶技术,完成AGV即时定位、环境感知、运动规划控制与故障诊断,实现集装箱无人转运;(4)具备与远端调度系统的无线通信功能,发送车辆位置、状态等信息,接收调度系统发出的任务、路线等指令;(5)具有故障诊断能力,在位置错误、环境不符、机械故障等情况下可启动应急反应机制、记录故障数据,并向水平运输系统发送错误信息,便于现场维护、部件更换;(6)AGV具备自动驾驶和手动操控两种模式,自动驾驶模式用于无人化作业,手动操作模式用于现场维护和应急处理;(7)AGV能在码头前沿岸桥和堆场交换区定点停车,距离指定区域边界距离误差不大于2cm。指定位置的停车精度考虑到集装箱在岸桥和堆场吊机的起落精准度,两者之间的误差小,才能保证装卸流程的一致性,也会使装卸流程更加流畅,是效率提升的关键。
2 结构设计
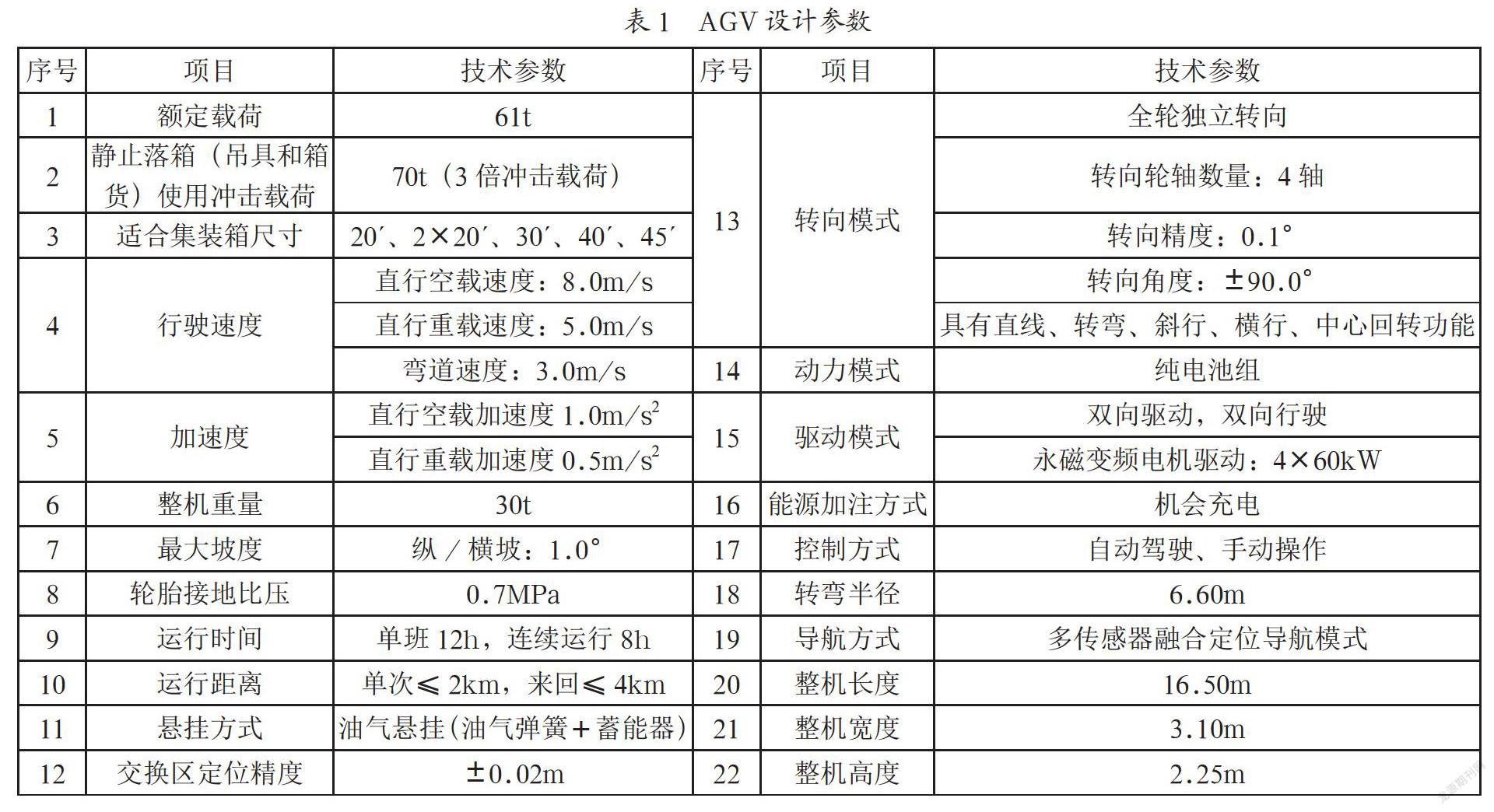
国内外集装箱自动运输车主要分为AGV和无人集卡两大类。考虑到车辆在转运过程中,需要较高的速度精度和转向精度才能达到指定区域定点停车的精度要求,所以本文选择AGV作为车辆的主体架构。首先确定AGV的传动形式,针对码头环境的复杂性和作业空间多样化,具有全轮转向独立驱动的结构更适合作业需求。整个AGV采用4轴转向轮,配置4个转向电机,转向精度达到0.1°,转向角度为±90.0°,具有直线、转弯、斜行、横行、中心回转功能。其次在整车动力方面选用纯电池动力形式,满足码头作业环境要求,噪声小,污染少,符合清洁能源,是未来AGV发展的主流方向。由于AGV的承载需求上,需要满足61t的承载能力,考虑到冲击载荷要求,AGV需要具备冲击载荷70t。根据作业要求,AGV的物理尺寸为长16.50m×宽3.10m×高2.25m,自身重量30t。在动力性能方面,行驶速度设计直行空载速度:8.0m/s,直行重载速度:5.0m/s,弯道速度:3.0m/s;加速度设计直行空载加速度1.0m/s2,直行重载加速度0.5m/s2。考虑到AGV在行驶过程中的定位需求,需要安装GPS接收天线及激光雷达,GPS在工作时不能被集装箱遮挡,因此设计了安装支架用于传感器固定,车身周围也布置了相应的安装附件。AGV的整体示意图如图1所示。
AGV机电控制系统要求具备车辆线控化,通讯参数基于CAN总线。能提供自动驾驶系统设备的安装位置空间、稳定电源供应、物理防护和保护,车辆需有自动驾驶传感器安装的支架等。
具体的设计参数如表1所示。
3 控制系统设计
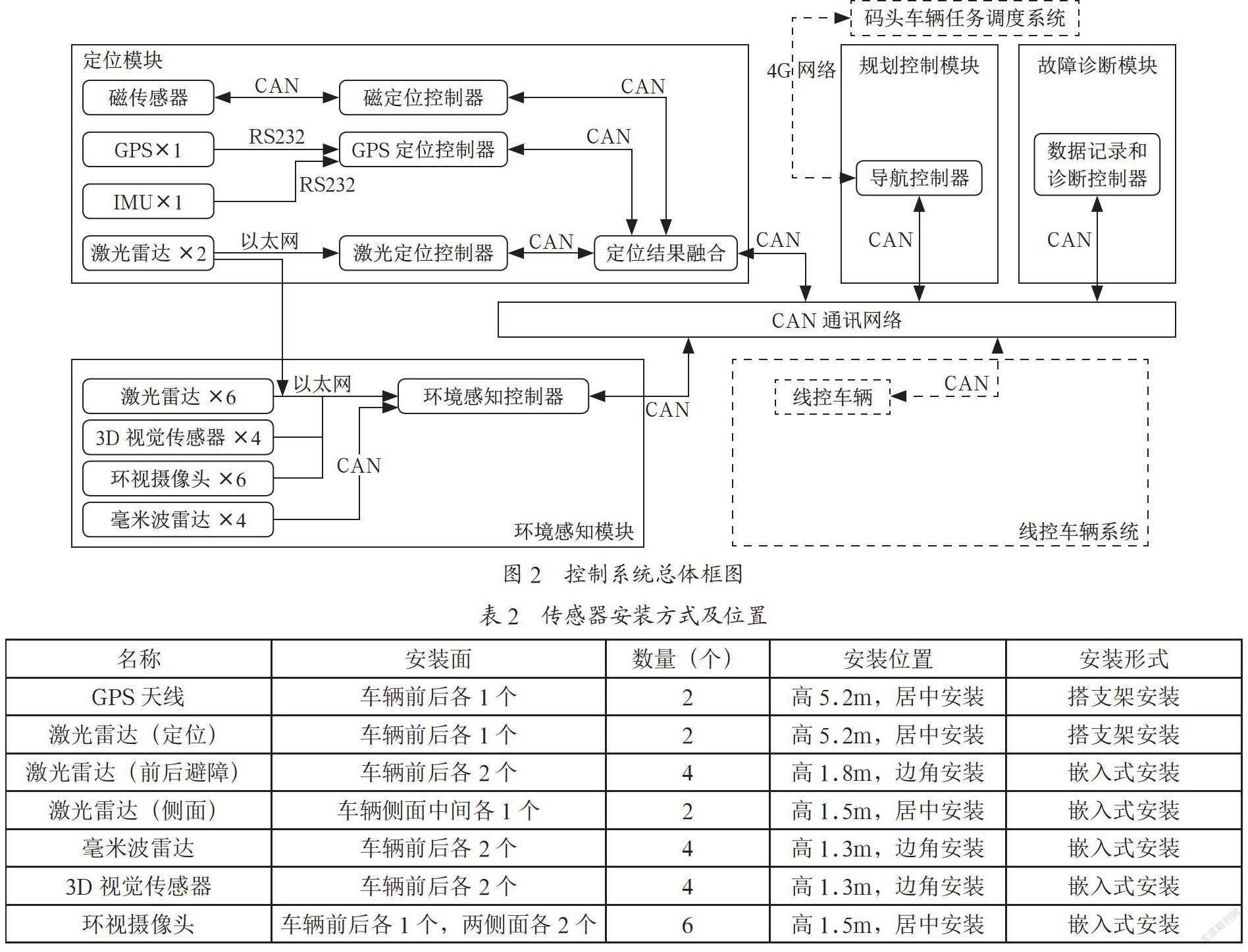
AGV以基于CAN总线通讯网络,以AGV线控车辆系统,基于多传感器信息融合的自动驾驶系统及远端的调度系统等组成[3],实现对AGV的精确定位及速度和转向控制。AGV需要在码头安全可靠地自动驾驶,需要自动驾驶系统具备定位功能、环境感知功能、规划控制功能和故障诊断功能。AGV运行的任务信息来源于调度系统,AGV在工作过程中需要接收调度管理系统的运输任务,在运输任务完成后需要向调度管理系统发送任务完成信号,完成AGV与码头调度管理系统之间的数据通讯,通讯方式采用4G网络通讯。控制系统的总体框架如图2所示。
AGV自动驾驶的定位系统用来持续解析出AGV的位姿坐标,以指导AGV的运行控制。在行驶过程中,准确的定位使得AGV能够按规划出的路径行驶,使AGV不跑偏;在指定的装卸位置时,要求有精确的定位,保证装卸的准确性。考虑到指定装卸位置的停车精度在0.02m以内,系统采用在指定装卸位置布置磁钉的方式,达到定位要求。
环境感知系统的主要功能是在AGV行驶过程中,检测与AGV行驶相关的信息,如行驶区域的人、其他车辆等障碍物的距离、方位等信息,计算障碍物等是否会与AGV发生碰撞等,提前让AGV做好预测准备,保障自动驾驶的安全。
AGV自动驾驶系统在以上两个子系统设计中运用了多种传感器,主要安装方式及位置如表2所示。
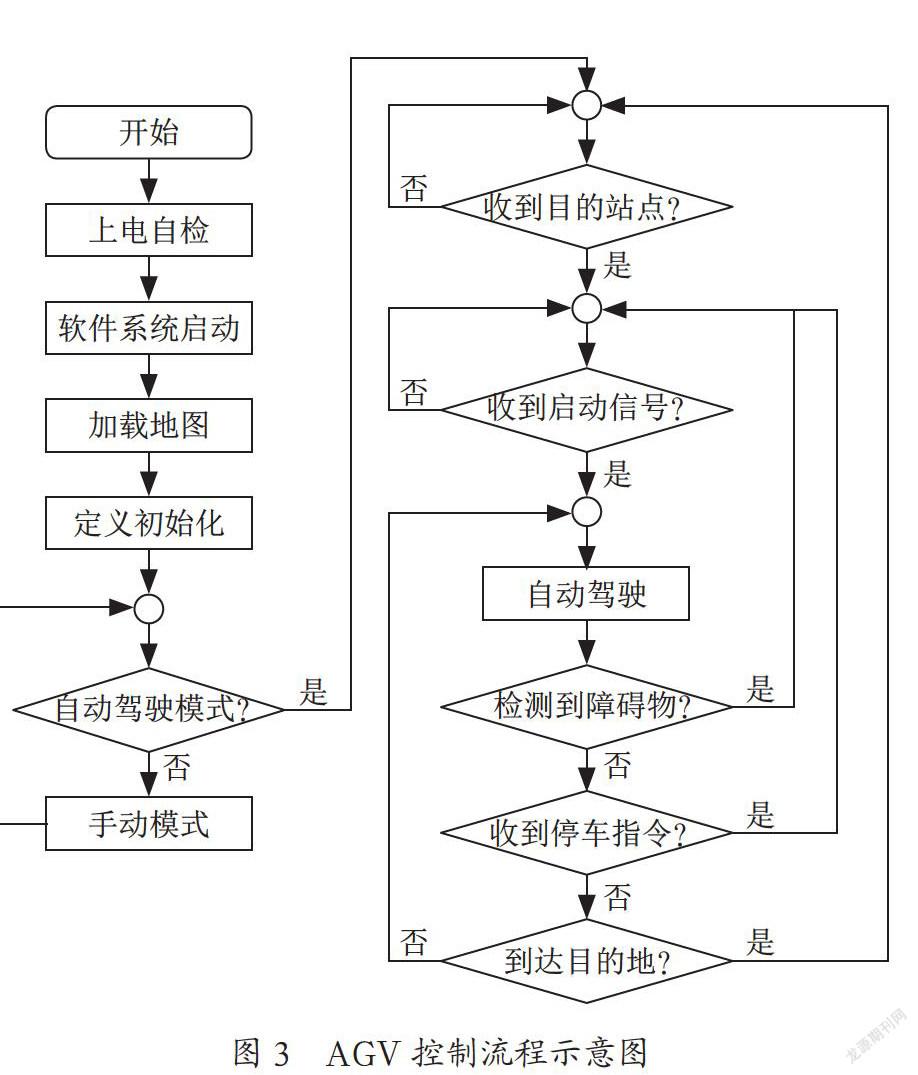
AGV的控制模式主要有手动控制和自动驾驶控制,AGV控制流程如图3所示。主要以调度系统、自动驾驶系统、线控车体三者之间的决策控制完成。
(1)具体的控制策略:上电自检,软件系统启动,加载地图,定位初始化,AGV得出当前的位置信息,下一步主要是在自动驾驶模式下接收调度系统的指令。(2)正常工作方式:主要在AGV调度系统的统一调配下,依据AGV本身状态信息、任务信息、环境感知信息、定位信息、高精地图,规划AGV行驶路线,控制AGV避碰、停车等行为;基于AGV数学模型,做轨迹跟踪控制[4],向AGV线控车体系统输出速度、加速度、转向信息等;同时响应用户切换为手动操作模式。(3)应急工作方式:AGV处于手动遥控模式时,车载遥控接收机接收遥控器的操纵信号,车体电控系统依据遥控器信号实现对车体的控制。可用频率数为433MHz,有效操作距离为100m以内。
4 系统的软件设计
AGV系统软件采用模块化结构设计,其中自动驾驶系统采用C++语言[5],基于Qt开发工具进行开发,界面友好,主要用于定位感知层、决策层、控制层等智能算法处理模块;AGV系统的响应和执行结构为线控车体系统,编程语言采用德国3S公司的CoDeSys软PLC开发包,符合IEC 61131-3国际标准。两者之間的通讯是基于CAN总线的网络通讯。图4是系统的软件结构。
5 结 论
一种适用于集装箱运输的新型AGV系统,将基于激光雷达等多传感器信息融合的定位感知、基于全轮独立转向控制的线控车体等技术成功应用于自动化码头的集装箱无人化转运。AGV车体设计结构紧凑、承载能力强、速度性能优越。多辆AGV可组成车队,由远端调度系统统一调度,大大提高了转运的效率。总之,集装箱运输的新型AGV系统是未来自动化码头水平运输的重要组成部分。
参考文献:
[1] 张广斌,胡文辉,陈金龙.自动化集装箱运输车AGV动力能源系统 [J].起重运输机械,2018(9):64-68.
[2] 彭传圣.集装箱码头的自动化运转 [J].港口装卸,2003(2):1-6.
[3] 杨瑞.自动化集装箱码头管控一体化系统技术研究 [J].中国水运(下半月),2015,15(1):60-63.
[4] 康志敏.集装箱自动化码头AGV路径优化和调度研究 [D].武汉:武汉理工大学,2011.
[5] 孙鑫,余安萍.VC++深入详解 [M].北京:电子工业出版社,2006.
作者简介:邓烨峰(1982),男,汉族,浙江绍兴人,工程师,硕士研究生,研究方向:智能装备系统、电子信息系统。
猜你喜欢
大陆桥视野·上(2017年5期)2017-06-27
航运交易公报(2016年49期)2017-04-17
航运交易公报(2016年49期)2017-04-17
航运交易公报(2016年41期)2016-11-22
航运交易公报(2016年4期)2016-11-19
航运交易公报(2016年5期)2016-05-14
航运交易公报(2016年8期)2016-03-21
航运交易公报(2016年9期)2016-03-19
航运交易公报(2016年6期)2016-03-05
集装箱化(2014年8期)2014-09-17