博物馆环境中基于Wi-Fi的实时定位系统设计
2019-09-10 07:22徐方施智勇鲍贤清
科学教育与博物馆 2019年2期
关键词:博物馆
徐方 施智勇 鲍贤清

摘 要 为了在观众参观过程中提供个性化的信息和服务,博物馆需要通过技术手段对每个观众进行实时定位。针对博物馆环境,我们设计了一个基于Wi-Fi的实时定位系统:将所有的位置测量单元设备都设定为时间同步,再根据各个设备检测到的信号,得出观众手机发射信号的位置和时间。运用仿真实验验证,发现只要布置足够的位置测量单元设备,该系统的位置精度可达厘米级,时间精度可达皮秒级,符合博物馆场景的使用要求。
关键词 博物馆 实时定位 时间同步 行动热点
0 引言
当今社会已经进入信息时代,数字技术的网络化趋势逐步渗透到各行各业中。在这一背景下,博物馆应当与时俱进,利用高新技术,更好地创新公共服务工作。那么,如何合理规划路线?如何有效疏导人流、维持秩序?对此,基于Wi-Fi的实时定位系统或许能帮助我们。根据观众的手机行动热点,实现复杂环境中的定位、监测和追踪任务,进而记录参观轨迹、分析观众身份,满足不同类型观众的不同需求,为分众化研究提供必要的依据,打造融合时态的全新体验空间。
1 利用Wi-Fi实时测量手机位置的工作原理
通过无线终端与无线网络的配合,采集移动手机的接入点,实时获取用户的位置信息,从而达到监控对象位置的目的。在电子地图平台的支持下,我们以P(X,Y,Z,T)的方式,表示目标手机P在T时刻发送信号的三维坐标。
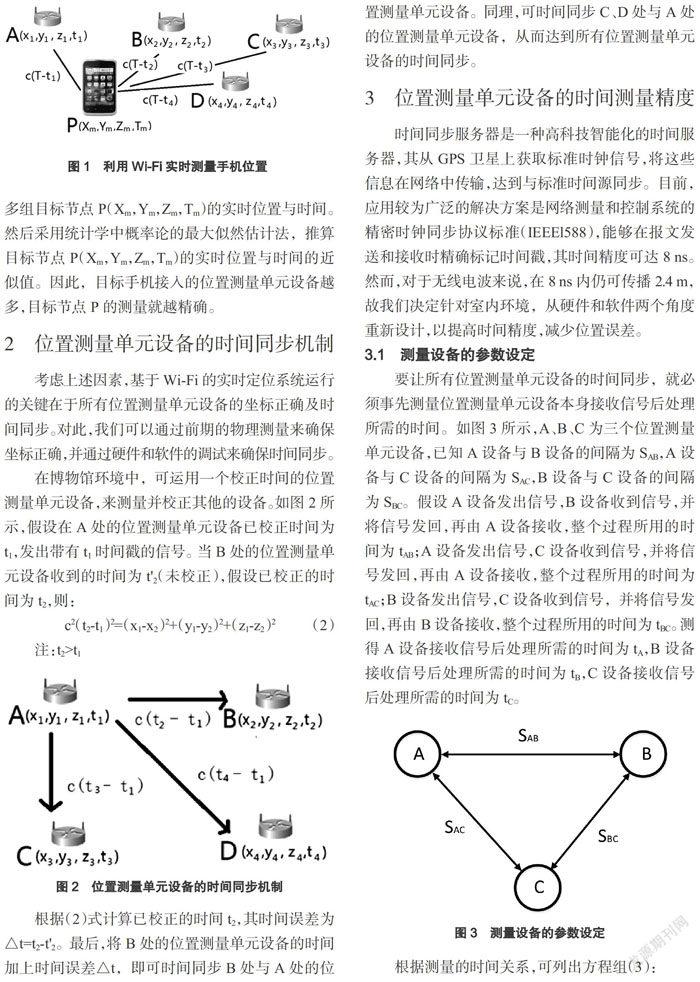
如图1所示,手机可以借助Wi-Fi接入不同位置测量单元设备。假设用户的目标手机P于Tm时刻在某处发出一已知信号,此信号带有时间戳,是手机执行异步切换时发出的接入突发信号,表示为P(Xm,Ym,Zm,Tm)。已知4个位置测量单元设备固定放置在A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3)、D(x4,y4,z4)。假设t1、t2、t3、t4分别为4个位置测量单元设备收到目标手机P发射信号的时间,表示为A(x1,y1,z1,t1)、B(x2,y2,z2,t2)、C(x3,y3,z3,t3)、D(x4,y4,z4,t4)。
已知无线电波的传播速度c为299 792 458 m/s,根據无线电波传播时间△t,可计算节点间的距离d(d=c△t)。此时,用户的目标手机P到A、B、C、D处的距离分别为d1=c(t1-Tm)、d2=c(t2-Tm)、d3=c(t3-Tm)、d4=c(t4-Tm)。则:
c2(t1-Tm)2=(x1-Xm)2+(y1-Ym)2+(z1-Zm)2
c2(t2-Tm)2=(x2-Xm)2+(y2-Ym)2+(z2-Zm)2
c2(t3-Tm)2=(x3-Xm)2+(y3-Ym)2+(z3-Zm)2
c2(t4-Tm)2=(x4-Xm)2+(y4-Ym)2+(z4-Zm)2 (1)
注:t1>Tm,t2>Tm,t3>Tm,t4>Tm。
如果目标手机接入5个及以上位置测量单元设备,则可将二次方程组全部转换为一次方程组,求出多组目标节点P(Xm,Ym,Zm,Tm)的实时位置与时间。然后采用统计学中概率论的最大似然估计法,推算目标节点P(Xm,Ym,Zm,Tm)的实时位置与时间的近似值。因此,目标手机接入的位置测量单元设备越多,目标节点P的测量就越精确。
2 位置测量单元设备的时间同步机制
考虑上述因素,基于Wi-Fi的实时定位系统运行的关键在于所有位置测量单元设备的坐标正确及时间同步。对此,我们可以通过前期的物理测量来确保坐标正确,并通过硬件和软件的调试来确保时间同步。
在博物馆环境中,可运用一个校正时间的位置测量单元设备,来测量并校正其他的设备。如图2所示,假设在A处的位置测量单元设备已校正时间为t1,发出带有t1时间戳的信号。当B处的位置测量单元设备收到的时间为t'2(未校正),假设已校正的时间为t2,则:
c2(t2-t1)2=(x1-x2)2+(y1-y2)2+(z1-z2)2 (2)
注:t2>t1
[图2 位置测量单元设备的时间同步机制]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-2.tif>
根据(2)式计算已校正的时间t2,其时间误差为△t=t2-t'2。最后,将B处的位置测量单元设备的时间加上时间误差△t,即可时间同步B处与A处的位置测量单元设备。同理,可时间同步C、D处与A处的位置测量单元设备,从而达到所有位置测量单元设备的时间同步。
3 位置测量单元设备的时间测量精度
时间同步服务器是一种高科技智能化的时间服务器,其从GPS卫星上获取标准时钟信号,将这些信息在网络中传输,达到与标准时间源同步。目前,应用较为广泛的解决方案是网络测量和控制系统的精密时钟同步协议标准(IEEEl588),能够在报文发送和接收时精确标记时间戳,其时间精度可达8 ns。然而,对于无线电波来说,在8 ns内仍可传播2.4 m,故我们决定针对室内环境,从硬件和软件两个角度重新设计,以提高时间精度,减少位置误差。
3.1 测量设备的参数设定
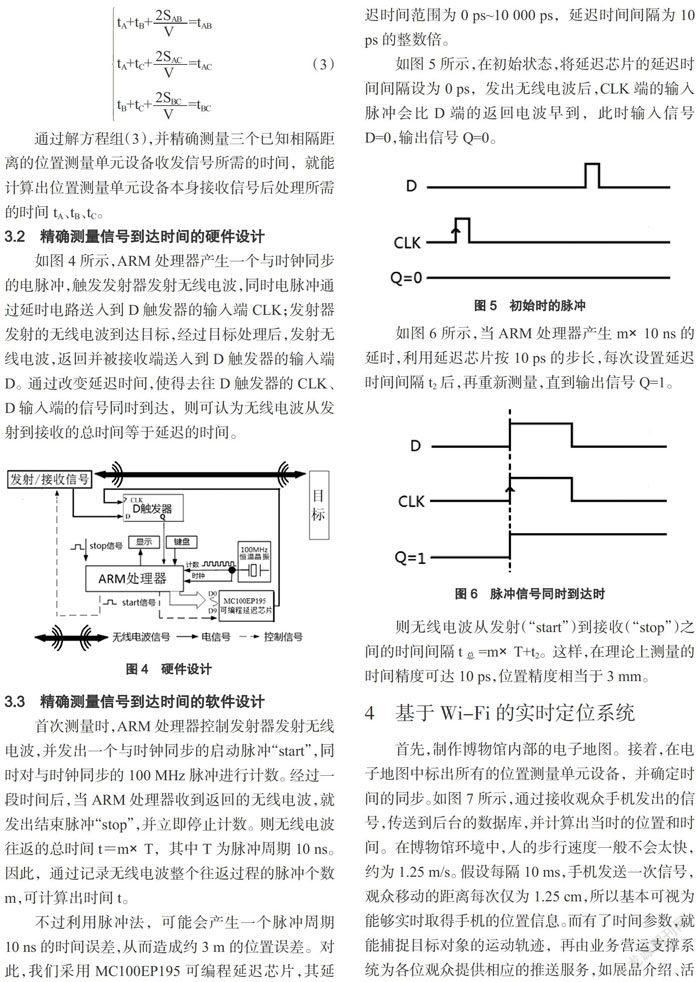
要让所有位置测量单元设备的时间同步,就必须事先测量位置测量单元设备本身接收信号后处理所需的时间。如图3所示,A、B、C为三个位置测量单元设备,已知A设备与B设备的间隔为SAB,A设备与C设备的间隔为SAC,B设备与C设备的间隔为SBC。假设A设备发出信号,B设备收到信号,并将信号发回,再由A设备接收,整个过程所用的时间为tAB;A设备发出信号,C设备收到信号,并将信号发回,再由A设备接收,整个过程所用的时间为tAC;B设备发出信号,C设备收到信号,并将信号发回,再由B设备接收,整个过程所用的时间为tBC。测得A设备接收信号后处理所需的时间为tA,B设备接收信号后处理所需的时间为tB,C设备接收信号后处理所需的时间为tC。
[图3 测量设备的参数设定]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-3.tif>
根据测量的时间关系,可列出方程组(3):
tA+tB
+=tAB
tA+tC
+=tAC
tB+tC
+=tBC (3)
通过解方程组(3),并精确测量三个已知相隔距离的位置测量单元设备收发信号所需的时间,就能计算出位置测量单元设备本身接收信号后处理所需的时间tA、tB、tC。
3.2 精确测量信号到达时间的硬件设计
如图4所示,ARM处理器产生一个与时钟同步的电脉冲,触发发射器发射无线电波,同时电脉冲通过延时电路送入到D触发器的输入端CLK;发射器发射的无线电波到达目标,经过目标处理后,发射无线电波,返回并被接收端送入到D触发器的输入端D。通过改变延迟时间,使得去往D触发器的CLK、D输入端的信号同时到达,则可认为无线电波從发射到接收的总时间等于延迟的时间。
[图4 硬件设计]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-4.tif>
3.3 精确测量信号到达时间的软件设计
首次测量时,ARM处理器控制发射器发射无线电波,并发出一个与时钟同步的启动脉冲“start”,同时对与时钟同步的100 MHz脉冲进行计数。经过一段时间后,当ARM处理器收到返回的无线电波,就发出结束脉冲“stop”,并立即停止计数。则无线电波往返的总时间t=m×T,其中T为脉冲周期10 ns。因此,通过记录无线电波整个往返过程的脉冲个数m,可计算出时间t。
不过利用脉冲法,可能会产生一个脉冲周期10 ns的时间误差,从而造成约3 m的位置误差。对此,我们采用MC100EP195可编程延迟芯片,其延迟时间范围为0 ps~10 000 ps,延迟时间间隔为10 ps的整数倍。
如图5所示,在初始状态,将延迟芯片的延迟时间间隔设为0 ps,发出无线电波后,CLK端的输入脉冲会比D端的返回电波早到,此时输入信号D=0,输出信号Q=0。
[图5 初始时的脉冲]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-5.tif>
如图6所示,当ARM处理器产生m×10 ns的延时,利用延迟芯片按10 ps的步长,每次设置延迟时间间隔t2后,再重新测量,直到输出信号Q=1。
[图6 脉冲信号同时到达时]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-6.tif>
则无线电波从发射(“start”)到接收(“stop”)之间的时间间隔t总=m×T+t2。这样,在理论上测量的时间精度可达10 ps,位置精度相当于3 mm。
4 基于Wi-Fi的实时定位系统
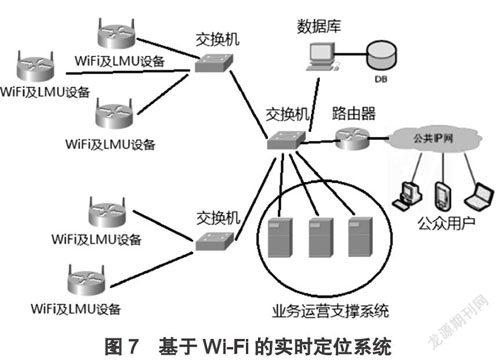
首先,制作博物馆内部的电子地图。接着,在电子地图中标出所有的位置测量单元设备,并确定时间的同步。如图7所示,通过接收观众手机发出的信号,传送到后台的数据库,并计算出当时的位置和时间。在博物馆环境中,人的步行速度一般不会太快,约为1.25 m/s。假设每隔10 ms,手机发送一次信号,观众移动的距离每次仅为1.25 cm,所以基本可视为能够实时取得手机的位置信息。而有了时间参数,就能捕捉目标对象的运动轨迹,再由业务营运支撑系统为各位观众提供相应的推送服务,如展品介绍、活动宣传等。
[图7 基于Wi-Fi的实时定位系统]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-7.tif>
5 仿真实验的验证
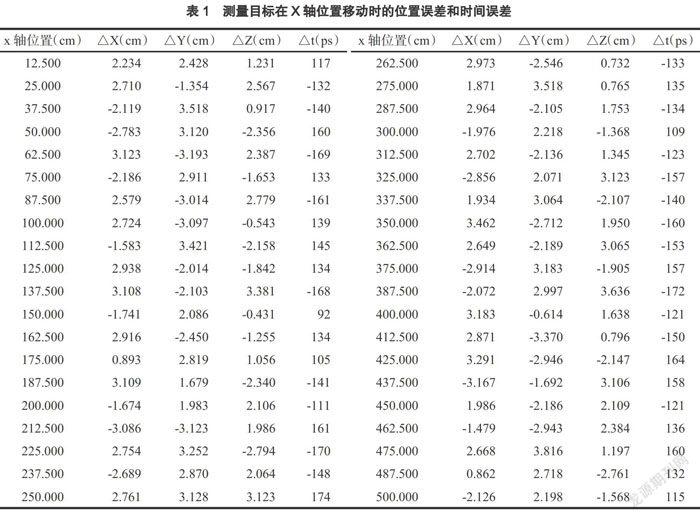
如图8所示,选取室内环境,设定区域面积长22 m、宽12 m,放置高度为1 m的8个位置测量单元设备。以位置测量单元设备1的时间为基准,同步其他设备。假设0 cm的位置对应整个区域的中心,将1个待定位目标手机放置在由计算机控制的电动平移台上,高度设为1 m,按照正常人的步行速度,从0 cm开始移动,每100 ms移动一次,每次移动12.5 cm,直到500 cm。
[图8 仿真实验的验证]<O:\Macfile-f\CY\2019年\科学教育与博物馆\2019-2\徐方-8.tif>
然后,测量目标在X轴位置移动时的位置误差和时间误差。每组实验如此重复10次,取平均值。由于观众身高差异等因素,△Z的误差在厘米级,大致可确定观众所在的楼层,所以△Z的误差可以忽略不计。由表1可知,△X与△Y相差不大,位置误差在(-3.46 cm,3.82 cm)的范围内,造成的时间误差在(-170 ps,174 ps)的范围内。
6 结论
针对博物馆环境,我们设计了一个基于Wi-Fi的实时定位系统,通过监测并追踪观众的手机位置及运动轨迹,提供各种便捷、多元的服务,以达到对展品的一种时间与空间叙事。运用仿真实验验证,发现只要布置足够的位置测量单元设备,该系统的位置精度可达厘米级,时间精度可达皮秒级,符合博物馆场景的使用要求。
参考文献
[1]施智勇.一种基于测距的无线传感网络的高精度定位改进算法[D].上海:上海师范大学信息与机电工程学院,2018.
[2]王辰,刘宇驰,金舟.基于无线定位的个性化导览关键技术及其在博物馆中的应用[J].计算机应用研究,2016(5):1419-1423.
[3]沈晓峰,王建.基于WiFi的实时定位技术在博物馆中的应用[J].计算机与网络,2015(20):54-57.
[4]施智勇,潘曉声,张谦.利用延时法进行高精度脉冲激光测距[J].光学精密工程,2014(2):252-258.
[5]朱中一.基于WiFi的室内定位技术在博物馆的应用[J].软件产业与工程,2013(3):38-41.
Design of the real-time positioning system based on Wi-Fi in museums// XU Fang, SHI Zhiyong, BAO Xianqing
First-Author's Address College of Education in Shanghai Normal University, E-mail: xufang@shnu.edu.cn
Abstract In order to provide the public with personalized information and services during the visit, museums need to locate each visitor in real time through technical means. Based on Wi-Fi, a real-time positioning system is designed. Firstly, all position measurement units are synchronized, and the time and position of the signal transmitted are calculated according to the signal sent by the visitors' mobile phones. According to the simulation experiment, as enough position measuring units are arranged, the position accuracy of the system can reach centimeters, and the time precision of the system can reach picoseconds, which meets the use requirements of the museum scene.
Keywords museums, real-time location, time synchronization, Wi-Fi
猜你喜欢
小太阳画报(2020年4期)2020-04-24
儿童故事画报(2019年7期)2019-08-05
好孩子画报(2018年7期)2018-10-11
小天使·一年级语数英综合(2018年5期)2018-06-22
作文大王·低年级(2017年10期)2017-10-28
儿童故事画报·智力大王(2015年11期)2016-01-27
文化月刊·下旬刊(2014年5期)2014-07-31
幼儿智力世界(2009年5期)2009-07-22
学与玩(2009年3期)2009-03-09