
面向陆表的星载GNSS-R DDM波形分类
2019-09-05 08:48涂晋升洪学宝汉牟田
测绘通报 2019年8期
涂晋升,张 瑞,2,洪学宝,汉牟田
(1. 西南交通大学地球科学与环境工程学院,四川 成都 611756; 2. 西南交通大学高速铁路运营安全空间信息技术国家地方联合工程实验室,四川 成都 611756; 3. 北京航空航天大学电子信息工程学院,北京 100191)
全球导航卫星系统反射信号(global navigation satellite system reflection,GNSS- R)技术是利用导航卫星信号及其前向散射信号作为信号源,开展大尺度地表物理参数分析与反演的一项新兴遥感技术[1]。星载GNSS- R技术是其重要分支,国外近年来针对该技术进行了一系列的星上载荷研制与在轨验证[2- 4],其中英国的灾害监测卫星UK- DMC[2]、UK TechDemoSat- 1(TDS- 1)[3]及美国的旋风全球导航卫星系统(CYGNSS)上均搭载了GNSS反射信号接收装置[4],获取了大量的星载GNSS反射信号数据。
与地基和机载GNSS- R技术相比,星载GNSS- R接收机搭载于更高的卫星平台上。针对地物类型较为单一的观测区域(如海洋、海冰等),利用星载反射信号生成的时延多普勒图(DDM)数据,可有效地探测反演多种参数,如海洋风速检索[5- 7]、海面测高[8]、海浪特征反演[9- 10]、海冰探测[11]等。然而,在涉及多类地物的陆表遥感应用中,因星载GNSS- R接收机获取的反射信号中混杂了各类地物的散射信息,更受到地形起伏、土壤湿度等因素的综合作用,导致生成的DDM数据波形错综复杂。虽然多个卫星系统已获取了大量的星载GNSS- R数据[2- 4],但针对复杂场景的陆表物理参数提取研究却始终陷于瓶颈。
DDM数据作为星载GNSS- R的直接观测量,是当前研究应用中最为广泛的数据源[12]。如何从海量低信噪比的陆表DDM数据中准确区分杂波信号和有效信息,对于科学观测数据的选取和相关研究的进一步深入,均具有重要意义。针对此现状,本文提出一种DDM波形分类方法,并通过试验数据处理,验证该方法的可行性与有效性。
1 星载GNSS- R DDM波形分类方法
星载GNSS- R观测量是将获取的反射信号数据处理成DDM,其中DDM的数学表达如下[13]
(1)
式中,Ti为相干积分时间;λ为信号波长;Pt为发射功率;Gt为发射天线增益;Gr为接收机天线增益;Rt和Rr分别为发射机与接收机到镜面反射点的距离;τ为时延;f为多普勒频移[14];Λ(τ)为GPS PRN自相关函数;sinc(f)为多普勒频移函数;σ0为表面A单位面积的散射系数。
对于星载GNSS- R DDM,由于反射面情况的不同,单位面积散射系数σ0分布不同,导致DDM相关峰的明显程度不同。本文给出3类经陆表反射形成的典型星载GNSS- R DDM,如图1所示。
相应的,将图1中DDM不同多普勒维的相关功率值进行累加,得到时延波形并进行归一化,本文将上述DDM对应的归一化时延波形定义为3类:规整波形、较不规整波形及复杂波形。
本文采取二分法对归一化后的相关功率范围为[0,1]的时延波形进行分割,通过判断时延波形与二分阈值线交点数量来判断时延波形规整性,进而实现DDM波形分类。具体如下:
(1) 首先对波形进行二分,阈值线选定为0.5,此时交点个数若为2,继续对[0,0.5]范围进行二分,阈值线选定为0.25:当交点个数仍为2时,将波形划分为规整波形;当交点个数大于2时,将波形划分为较不规整波形。
(2) 若在阈值线为0.5处交点个数大于2,继续对[0.5,1]范围进行二分,阈值线设定为0.75:当交点个数为2时,仍将波形划分为较不规整波形;当交点个数大于2时,将波形划分为复杂波形。
通过对上述过程进行概括,得到DDM波形分类的具体流程,如图2所示。
判断过程中,3类时延波形与二分阈值线相交情况如图3所示。
2 实测数据波形分类与结果验证
利用本文提出的分类方法对UK TDS- 1卫星获取的DDM数据进行波形分类。这里选取由PRN 15和PRN 10卫星发射信号形成的DDM数据进行处理,采集时间分别为2015- 01- 28及2014- 11- 23,由于天线增益过低时会影响整体的分析质量,分类前将天线增益小于5 dB的数据滤除[15]。通过数据处理,得到DDM波形分类结果见表1。

表1 DDM波形分类结果
为了验证波形分类效果,继续对3种不同类别波形对应的DDM SNR进行提取,DDM信噪比计算公式为[15]
(2)
式中,DDMSNR为DDM信噪比;DDMPeak为DDM峰值功率,本文利用Matlab软件中自带的max函数检测出DDM的峰值功率;DDMNoise为DDM噪声功率,本文将噪声功率定义为位于DDM顶部的前5个延迟像素并跨越DDM中可用的多普勒范围内全部功率的平均值。
通过式(2)计算出分类后的波形对应的DDM SNR并进行了平均,得到统计结果如图4所示。
从图4中可以看出,3类DDM波形对应的SNR大小具有明显的区分度,这表明本文提出的DDM波形分类方法能够很好地用来对实测DDM数据波形进行分类。
为了进一步论证波形分类的可行性与有效性,本文继续对上述分类后的DDM波形对应的地物类型进行了统计,数据中对应的地物类型共包含9种:常绿阔叶林、落叶阔叶林、混合林、灌丛、农田、稀树草原、草原、稀疏植被、水体。为了统计结果更加简明,将常绿阔叶林、落叶阔叶林、混合林和灌丛4种地物归类为林地类;稀树草原和草原归类为草原类;农田、稀疏植被、水体各为一类进行了统计,统计结果见表2。
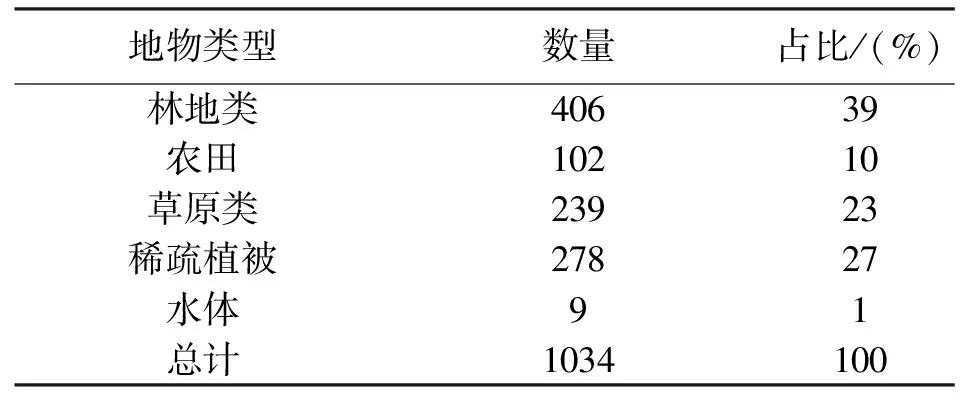
表2 实测数据中地物类型统计情况
通过对3类DDM波形对应的地物类型情况进行统计,得出统计结果趋势如图5所示。
从图5可以看出,随着地物类型的变化(植被覆盖程度逐渐降低),规整波形占比大致呈逐渐上升趋势;复杂波形占比下降趋势明显;而对于较不规整波形占比而言,当地表植被覆盖程度较高时,波形占比变化趋势逐渐上升,但当地表植被覆盖程度明显降低时,波形占比下降趋势非常明显。这表明地物类型影响着不同DDM波形占比,而且两者之间呈现强相关性。
3 结 语
利用本文提出的星载GNSS- R DDM波形分类方法,能够有效解决杂波信号和有效信息难以区分的问题,且分类后的波形与典型地物类型之间显现出强相关性。进一步开展相关性分析表明,在植被覆盖度较高的区域,信号组分中复杂波形占多数;而在植被覆盖度较低的区域,信号组分中规整波形占多数。这进一步说明分类后的波形数据与地表的反射特性关系紧密,也证实了波形分类的可行性与有效性。
目前,星载GNSS- R陆表遥感应用研究尚处于初步探索阶段。但通过本文提出的分类方法可为后续陆表物理参数提取研究提供前期的数据筛选参考:如当进行地表土壤湿度参数提取时,应尽量选取植被覆盖程度较低的区域进行研究,即规整波形是理想的数据。本文属于初期探索,后续将继续深入对星载GNSS- R陆表遥感应用的研究。
致谢:在研究过程中得到北京航空航天大学电子信息工程学院杨东凯教授的悉心指导,在此致以衷心的感谢。
猜你喜欢
民族文汇(2022年24期)2022-06-09
电脑知识与技术(2021年22期)2021-09-14
中国化工贸易·下旬刊(2019年5期)2019-10-21
学生导报·东方少年(2019年7期)2019-06-11
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23
宇航计测技术(2018年3期)2018-09-08
数学学习与研究(2017年11期)2017-06-20
青年时代(2017年3期)2017-02-17
佛山陶瓷(2016年11期)2016-12-23
