基于船载北斗导航仪测量波浪参数方法研究
2019-09-05 06:18:48周红进李方能兰国辉
舰船科学技术 2019年8期
周红进,李方能,黄 谦,李 伟,兰国辉
(1. 海军大连舰艇学院 航海系,辽宁 大连 116001;2. 海军工程大学 导航工程系,湖北 武汉 430032)
0 引 言
波浪参数(波高、波周期等)对于舰船航行安全、拟定航行计划至关重要。现代舰船获取波浪参数信息的途径主要通过接收气象传真图或卫星云图获取实况分析和短期预报,但这种方法获取的波浪参数尺度一般都很大,是关于整个海区的波浪参数信息,舰船自身所处海况则无从获知。导致这一现状的原因是缺乏船载波浪参数测量设备。
船载测量波高对于远洋运输和军事行动意义重大,但一直都没有很好解决,主要有两方面的原因:一是传统的波高测量设备大多是接触式波高计或浪潮仪,如浮标式波高计、压力传感式波高计/浪潮仪、超声波波高计等等,它们或浮于海面,或沉于海底,不能跟随船体移动,因此难以用于船载测量;是船体在海洋中受到海浪的影响而产生颠簸,测量海浪波高时没有静止参照物,因此不能正确地测量海浪波高[1-5]。
北斗卫星导航系统是我国独立自主发展和运行的卫星导航系统。现代舰船,尤其是军舰普遍安装了北斗卫星导航仪。北斗导航仪能够实时测量天线的高度(相对海平面的高度),在短时间的航行中(如10-20 min),舰船所处局部位置的海平面高度是不变的。但舰船会随着波浪升沉,天线的实际高度也随之变化。通过对北斗导航仪输出的天线高度数据进行频谱分析,结合波浪频谱特征,进行带通滤波,在频域内提取波浪信号,然后进行傅里叶逆变换,反演得到时域波浪数据,从而计算波高、波周期等参数。
1 测量方法
1.1 波高测量统计
波高与周期的测量包括最大波高、1/10 最大波高、1/3 最大波高、平均周期等特征值[6]。
不规则波的波形中具有一定统计特征的波高。由于外观波形的不规则性和随机性,目前多数采用“上跨零点法”对外观波形(表视波)及其要素给予定义。对一个不规则波的波高仪记录,首先确定其无趋势项的水位零点,波动水位过程线自波谷上升与零线交点称为上跨零点,自波峰下降与零线交点称为下跨零点,2 个相邻上跨零点之间的波形称为一个表视波,2 个相邻上跨零点的跨离称为周期,波峰顶和波谷底的垂直距离称为波高。
最大波高是波浪连续记录中波高的最大值。将波浪之波高大小按照顺序排列,所有波高个数中最大之1/10个波高的平均值,称为1/10 最大波高,记为;所有波高个数中最大之1/3 个波高的平均值,称为1/3 最大波高,或称为有意义波高、有效波高,记为。平均波高是波浪连续记录中所有波高的平均值,其对应周期的平均值为平均周期。
1.2 波浪信息提取
本文利用北斗导航仪输出的天线高度信息研究海浪波形参数。安装在舰船上的北斗导航仪输出信息包括:北斗天线随舰船运动的速度信息,实时反映舰船对地航速;北斗天线的位置信息,实时反映舰船的位置;北斗天线相对海平面的高度信息,既反映了舰船所处位置的海平面高度,也实时反映了舰船随波浪升沉的信息[7-10]。
速度信息虽然也包含了波浪波速信息,但主要包含了舰船在螺旋桨推动下的对地航速,难以从中提取波浪信息。位置信息通常是经纬度数据,主要包含了舰船的平面坐标,由于舰船是主动力推进运动的,不是浮标,也难以从中提取波浪信息。
在10~20 min,舰船位置变化小,海平面高度基本不变,此时天线高度信息则直接反映了舰船随波浪升沉的信息。因此适合提取波浪信息。
对北斗导航仪输出的天线高度序列进行傅离叶变换获得高度谱。自相关函数定义为:


S(f)为高度谱,表示天线高度在频域中某个频段的能量分布。由于波浪的运动位于一个特定的频带内,通过带通滤波可以获得波浪的频谱。滤波方程为:



2 实验及结果
某船在东海海域执行任务期间,采集记录了北斗数据,图1 为北斗天线安装位置。通过国家海洋局水文气象中心,获得了当时船所在位置的准确波浪信息,将该波浪信息作为基准衡量本文提出的测量波高方法的可行性和准确度。
利用本文测量波浪的方法,对采集的4 个位置和时间段的数据分别进行了处理,得到波高和波周期,图2~图9 分别为同时间4 个位置的波浪高度谱和波形参数曲线。

图 1 北斗天线安装位置Fig. 1 Beidou antenna mounting position
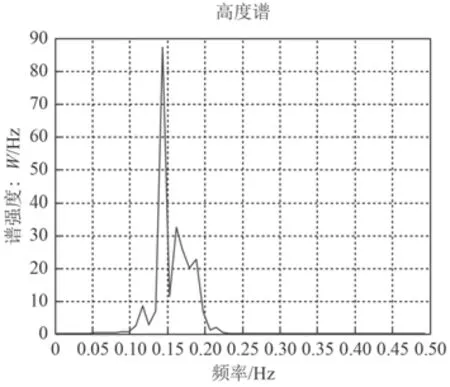
图 2 波浪谱(20140912-0600)Fig. 2 Wave spectrum (20140912-0600)
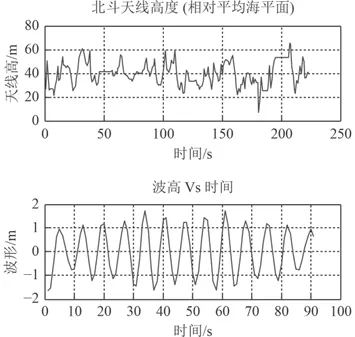
图 3 波形(20140912-0600)Fig. 3 Wave height (20140912-0600)
与国家海洋局水文气象中心实测数据比较结果如表1 所示(水温气象中心波高为1/3 波高,即Significant Wave Height-SWH)。
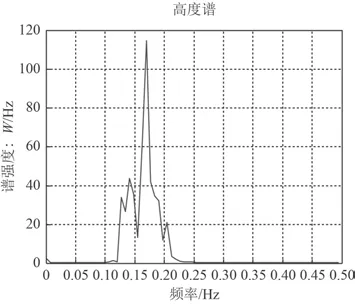
图 4 波浪谱(20140912-1200)Fig. 4 Wave spectrum (20140912-1200)
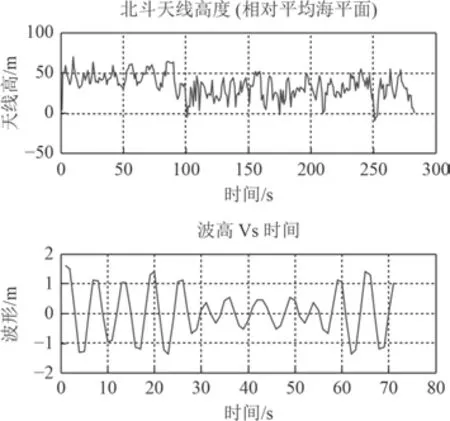
图 5 波形(20140912-1200)Fig. 5 Wave height (20140912-1200)
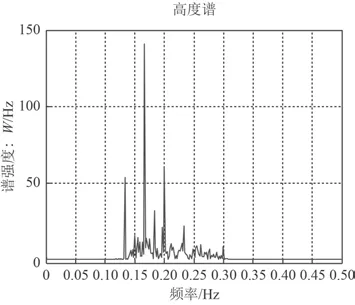
图 6 波浪谱(20140915-0000)Fig. 6 Wave spectrum (20140915-0000)
从数据处理结果来看,利用本文提出的方法,波高测量的精度优于6.0%,总体而言,波浪较大的时候,测量精度要把波浪小的时候精度要高。从数据处理过程来看,每个位置点的数据持续时间大约为15 min,短的时候只有5 min,比如2014 年9 月12 日1 200 的数据,由于北斗发生了信号丢失,有效数据只有5 min。对于一个波周期而言,5 min 的数据也足够,在进行数据处理时,尤其是最后一步针对提取处理的波浪信号进行逆傅里叶变换后,计算波高和波周期时,由于滤波稳定时间的存在,通常应在1~2 波周期后,开始计算波高,这样比较准确。
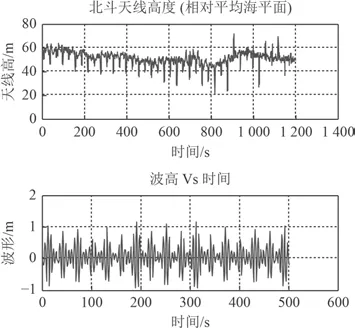
图 7 波形(20140915-0000)Fig. 7 Wave height (20140915-0000)
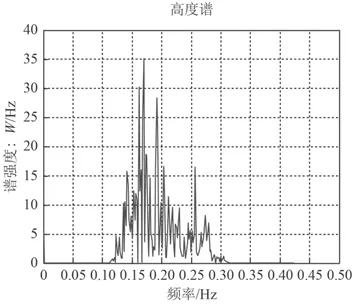
图 8 波浪谱(20140918-0600)Fig. 8 Wave spectrum (20140918-0600)
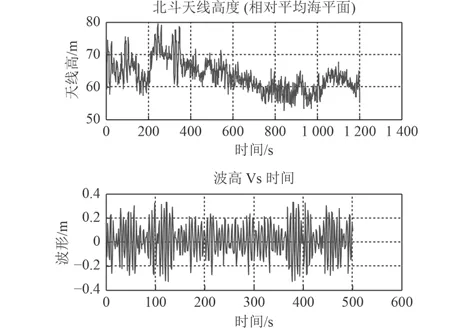
图 9 波形(20140918-0600)Fig. 9 Wave height (20140918-0600)
3 结 语
利用船载北斗导航仪测量的天线高度信息,通过谱分析,结合波浪的频谱分布,进行带通滤波,可以从天线高度信息提取波浪信号,将频域信号通过逆傅里叶变换,就可以获取波浪在时域内的波形变化规律,从而计算出波高和波周期。实测试验结果表明,该方法可以准确的测量波浪参数,波高测量误差可以达到6.0%以内,波周期测量误差可以达到10%以内。这种方法为远航舰船或执行军事任务的军舰提供了一种实时获取舰船所在位置的实时波浪信息的有效手段。
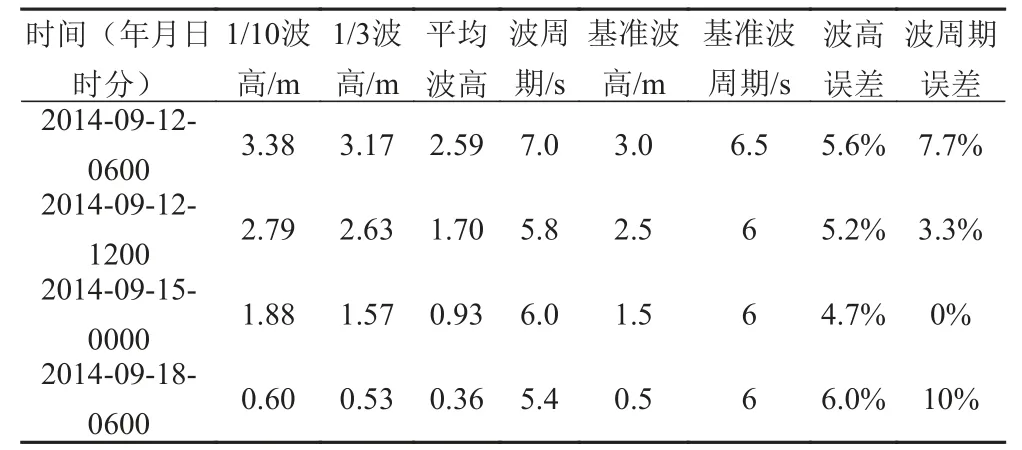
表 1 试验结果Tab. 1 Test results
在使用本文提出的方法提取波浪信息时,有3 点需要注意:
1)需要近似获取波浪的频谱特征。可以从气象传真图或卫星云图的大尺度海域波浪分析图中获取。
2)本文的方法目前还只是经过了4 批海上实测数据的检验,其普遍适用性还有待进一步的验证。
3)波浪信息参数不仅包括波高、波周期,还包括波向分布。获取波向谱对于舰船操纵具有重要意义。这也是下一步的研究方向。
猜你喜欢
中国港湾建设(2024年1期)2024-01-30 09:45:06
舰船科学技术(2022年21期)2022-12-12 08:07:10
海洋通报(2021年3期)2021-08-14 02:20:46
舰船科学技术(2021年12期)2021-03-29 01:28:44
中国港湾建设(2021年2期)2021-02-27 05:43:40
现代营销(创富信息版)(2018年6期)2018-09-05 03:14:32
现代营销(创富信息版)(2018年2期)2018-02-10 05:20:40
舰船科学技术(2016年1期)2016-02-27 15:39:26
女报seaside(2014年10期)2014-04-29 21:02:51
计算机应用文摘(2010年1期)2010-04-29 00:44:03