“嫦娥4号”中继星开环测速方案设计与试验验证
2019-09-02 00:34谢剑锋韩松涛曹建峰平劲松
深空探测学报 2019年3期
陈 略,谢剑锋,韩松涛,曹建峰,平劲松
(1.北京航天飞行控制中心,北京100094;2.中国科学院国家天文台,北京100012;3.中国科学院新疆天文台,乌鲁木齐830011)
引 言
深空探测器轨道测量主要通过无线电测量方式予以实现,主要包括对深空探测器的测距、测速与测角,其中主要通过甚长基线干涉测量(Very Long Baseline Interferometry,VLBI)方式实现对深空探测器的高精度测角。测距、测速对深空探测器视向方向的轨道约束敏感,VLBI 对深空探测器运动轨迹切向方向轨道约束敏感。我国深空测控干涉测量系统是基于我国深空网构建的高精度干涉测量系统,由佳木斯深空站、喀什深空站、南美深空站、纳米比亚站以及北京深空干涉测量任务中心组成,主要实现对深空探测器的实时与事后高精度干涉测量,完成对我国深空探测器的轨道测量任务[1-5],例如在“嫦娥4 号”中继星任务中,该系统在中继星飞行期间的地月转移段、月球到地月L2 点转移段、L2 点捕获段、L2 点使命轨道段对中继星进行实时与事后干涉测量。深空测控干涉测量系统一方面除了能给深空探测器定轨提供高精度的时延、时延率观测量支持,另一方面由于深空测控干涉测量系统具备VSR(VLBI Science Receiver,VLBI 科学接收机)格式窄带采集记录能力,可为高精度开环测速提供必要条件,因此本文提出了一种深空高精度开环测速方案,可为深空探测器精密定轨提供测速观测量支持。
国内外多名学者研究了开环跟踪测量技术[6-10],有力促进了深空探测器高精度轨道测量技术发展,但缺乏针对我国深空探测器开环测速方案与实际试验验证。本文提出了一种针对我国深空探测器的高精度开环测速方案,依托我国深空测控干涉测量系统,在“嫦娥4号”-“鹊桥”中继星任务中开展了试验验证与精度比对分析工作,为后续我国深空探测任务实施提供了一种新的高精度轨道测量手段。
1 基于深空测控干涉测量系统的测速方案简要设计
为实现基于深空测控干涉测量系统的开环与闭环测速,这里进行方案设计。方案设计中不包括对深空探测器的引导跟踪,该功能是按照深空干涉测量任务实施流程予以实现。因此,本测速方案中主要涉及窄带干涉测量数据采集记录、探测器主载波多普勒频率高精度提取、测量结果比对3个方面,下文分别进行简要论述。
1.1 窄带干涉测量数据采集记录方案
基于深空测控干涉测量系统的数据采集记录设备,可实现对探测器下行信号的窄带模式记录,满足开环测速需求。窄带数据采集记录方案依据深空探测器下行信号特点,分别在深空探测器的主载波、DOR 侧音设置信号采集记录通道与中心频率,采集通道的中心频率依据探测器理论下行频率、多普勒预报频率联合确定。在“嫦娥4号”中继星测速试验任务中,为了兼顾深空干涉测量需求,采用8通道采集记录模式。这里需要说明,如果只进行开环测速,选择1个主载波通道采集记录探测器下行信号即可。采样带宽通常设置为50/100/200 kHz,量化位数为8 bit,这样既满足深空探测器相对深空站运动引起的多普勒动态变化范围需求,确保采集通道包含有效的下行信号特征,同时满足快速信号处理要求,达到测速观测量快速提取目的。
1.2 主载波多普勒频率高精度提取方案
基于采集记录的VSR 格式窄带原始数据,开展针对信号强度最突出的主载波进行高精度相位、频率提取,实现对反映探测器速度变化关系的多普勒频率提取,进而生成开环与闭环测速观测量。本文采用了传统傅里叶变换+自适应线性调频Z变换+信号本地重构相关的信号处理方案,实现对探测器主载波频率高精度提取。首先设置合理积分周期,利用传统FFT(Fast Fourier Transformation,傅里叶变换)方式实现对主载波频率粗估计;其次在傅里叶变换获得的主载波频率初始值附近利用CZT(Chirp Z-Transform,线性调频Z变换)方法对信号处理的频谱进行细化,提取更高精度的主载波频率估计值;然后基于CZT 获取的主载波频率估计值,构建主载波频率变化模型,进而生成反应探测器运动的时延率、时延模型,结合探测器的天空频率、本地频率,重构探测器主载波信号模型;最后利用重构信号模型与实际采集记录主载波通道信号进行互相关运算,提取频率最大值处的相关相位,依据相关相位随时间变化关系,估计残余频率值,结合CZT获得的模型频率值,残余频率值+模型频率值即得到对探测器高精度主载波频率估值,进而获得多普勒频率估值。
在此方案中,最重要步骤是构建信号本地重构模型,阐述如下。
利用CZT 获取的主载波频率值,并依据信号时标,拟合得到主载波频率相对于时间的表达式,拟合阶数设置为1阶,即获得主载波频率模型。其matlab语言的数学表达式如式(1)所示

其中:p为获得的1 阶拟合系数(即时延率模型系数);t为时标;fczt为CZT获得主载波频率时间序列;fsky为探测器的天空频率;1为拟合阶数。依据时延率与时延的积分关系,由时延率模型系数p获得时延模型系数pτ,其matlab的数学表达式如下

进而得到时延模型tτ=polyval(pτ,t)。
依据时延模型系数,在本地重构探测器下行信号模型,其表示如下

其中:ycon为本地重构信号模型;floc为深空站本振频率。
将重构信号与预处理信号进行共轭相关运算,按照与以上相同的积分时间设置进行FFT 的频谱分析,找出频谱上幅值最大处频率所对应的相位,即为残余相位,得到残余相位的时间序列,利用残余相位序列即可拟合出残余频率yres,yres加上fczt即获得探测器下行主载波频率估计值。
1.3 测量结果比对方案
基于深空测控干涉测量系统获得探测器主载波多普勒频率,代号:IMC(Interferometry Measurement Center),与深空站基带设备获取的多普勒频率测量值,代号:DTE(Data Terminal Equipment)及累积载波相位测速的多普勒频率测量值(代号:Phase)在保证时标一致情况下,直接进行比对,评估相对偏差、随机精度。并将3种多普勒频率输入探测器联合定轨程序,进一步评估多普勒测速绝对精度。
2 试验验证
深空测控干涉测量系统在中继星进入L2 点使命轨道之前,北京深空干涉测量任务中心组织佳木斯深空站、喀什深空站,每日均对探测器进行干涉测量,基于以上方案均获取了每日的开环与闭环测速结果。6月20日,北京深空干涉测量任务中心同时组织了基于佳木斯深空站、喀什深空站的干涉测量与三向测量试验任务,佳木斯深空站为上行主站,喀什深空站为从站,观测弧段为北京时间16:30—20:30,为全面验证本方案提供了条件。佳木斯、喀什深空站采用8通道、50 kHz 带宽、8 bit 量化模式进行数据采集记录。选用中继星主载波通道,进行傅里叶频谱分析如图1所示。以喀什深空站数据处理分析为例,开环测速设置积分时间为1 s,利用傅里叶变换+自适应线性调频Z 变换+信号本地重构相关的信号处理方案,获得中继星主载波的多普勒频率,同时回放深空站基带获取的DTE 与Phase 测速多普勒频率值,其结果如图2 所示。图3为多普勒频率拟合残差,可以看出3类测速结果均对探测器的速度变化关系敏感。图4为IMC获取的多普勒频率与基带获取的DTE、Phase 多普勒频率的比对情况。
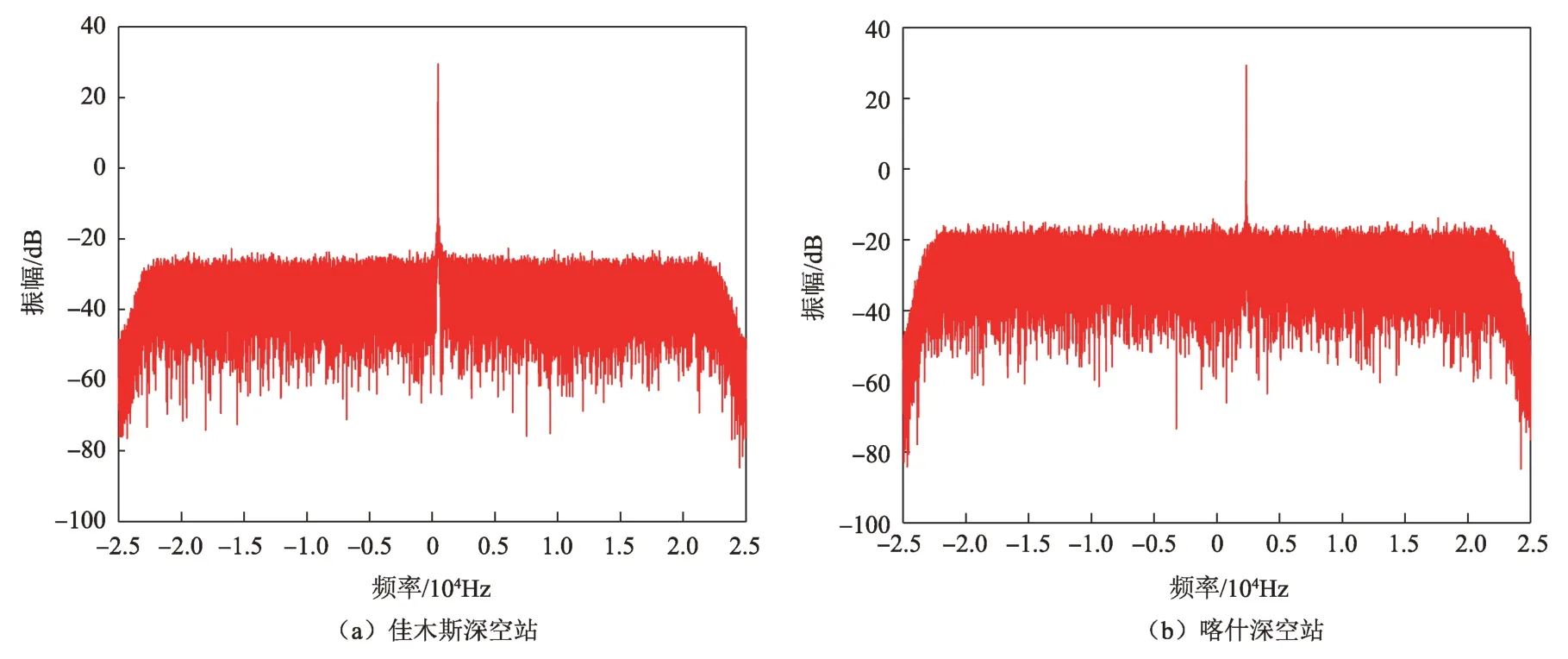
图1 佳木斯、喀什深空站的中继星主载波频谱图Fig.1 Relay satellite carrier FFT spectrum of JMS and KSH deep station
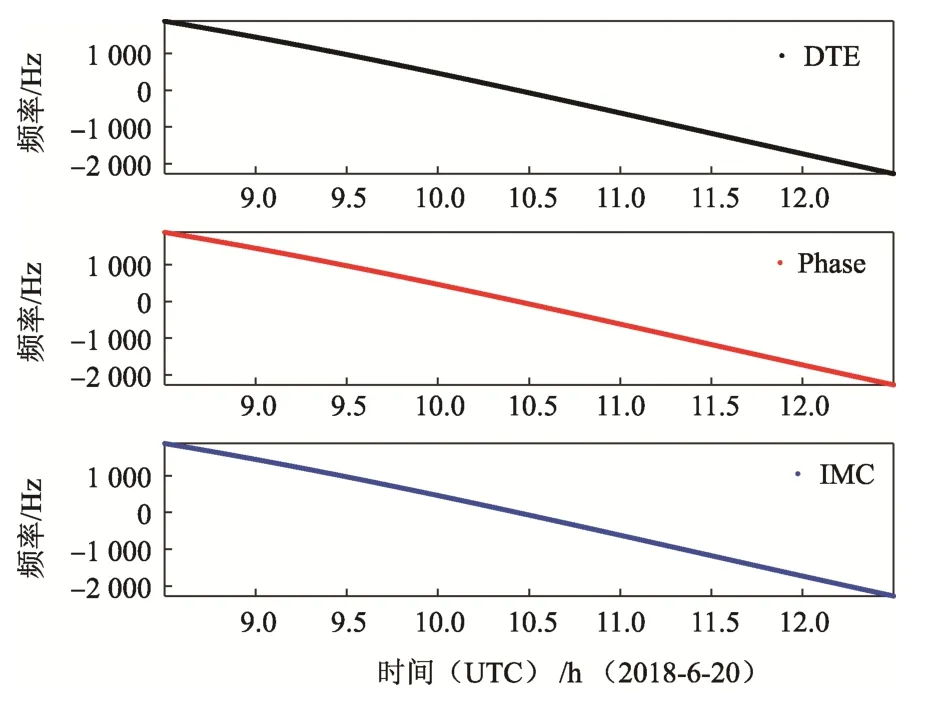
图2 喀什深空站基带(DTE)测速多普勒、累计载波相位(Phase)测速多普勒、深空干涉测量任务中心(IMC)提取的多普勒频率结果Fig. 2 Doppler frequency results of baseband velocity in KSH station,accumulation phase
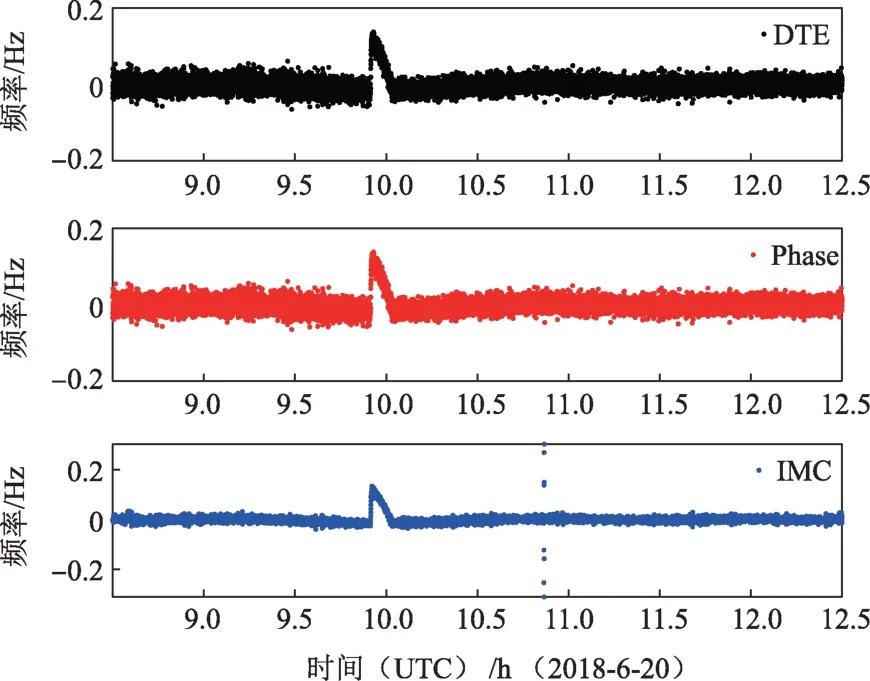
图3 喀什深空站残余多普勒频率Fig. 3 Residual Doppler frequencies of KSH station
为定量评估DTE、Phase 与IMC 多普勒频率精度,这里计算并统计出相关结果如表1所示。
图5 为中继星联合定轨后的所有佳木斯、喀什、南美深空站的测速残差,里面包含IMC的测速残差。为进一步比对精度,单独画出IMC 获取的佳木斯深空站测速残差如图6所示。
从表1及图5~6结果可以看出,佳木斯、喀什深空站的基带多普勒(DTE)测速、累计载波相位(Phase)测速精度均在0.4 mm/s(1σ)以内,深空干涉测量任务中心(IMC)从干涉测量数据提取的测速精度在0.2 mm/s(1σ)。DTE/Phase/IMC 的多普勒测速结果一致性较好,IMC在偏差与随机差方面优于深空站基带的测速结果,由此验证了采用本方案实现对中继星开环与闭环高精度测速的可行性与可靠性。
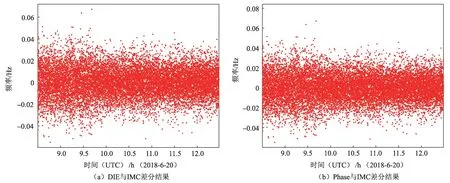
图4 喀什深空站DTE、Phase与IMC多普勒频率两两差分结果Fig. 4 Differential Doppler frequency results among DTE,Phase and IMC
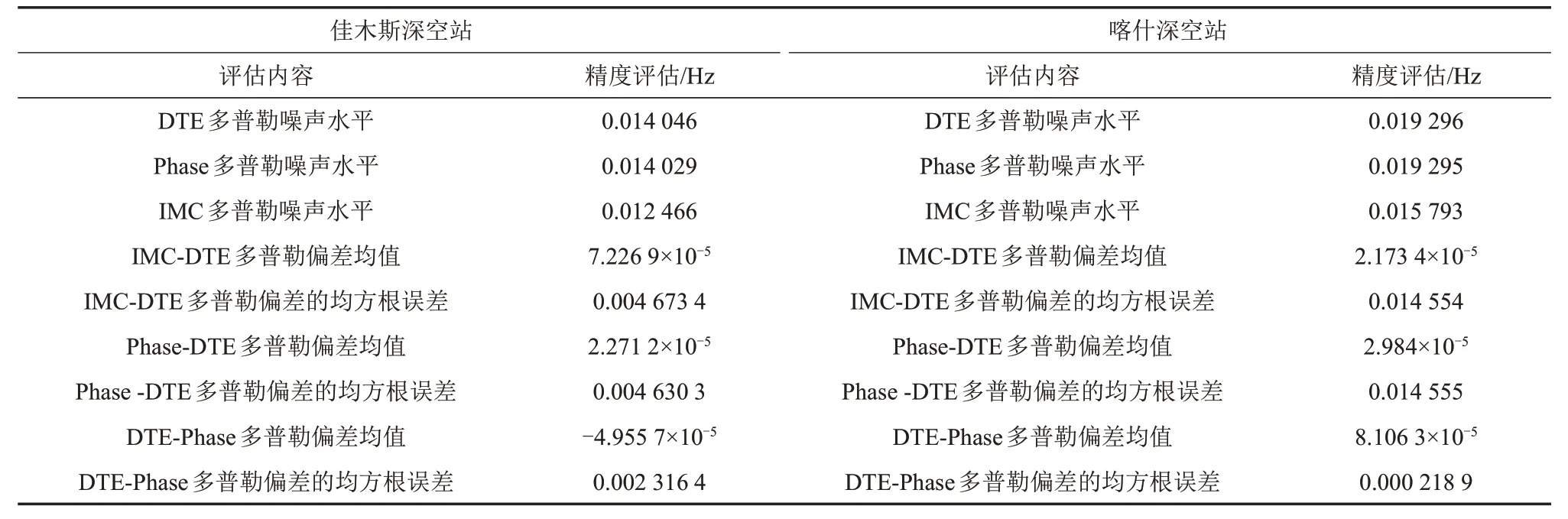
表1 DTE、Phase与IMC多普勒频率精度定量评估Table 1 Doppler frequency accuracy quantitative evaluation among DTE,Phase and IMC
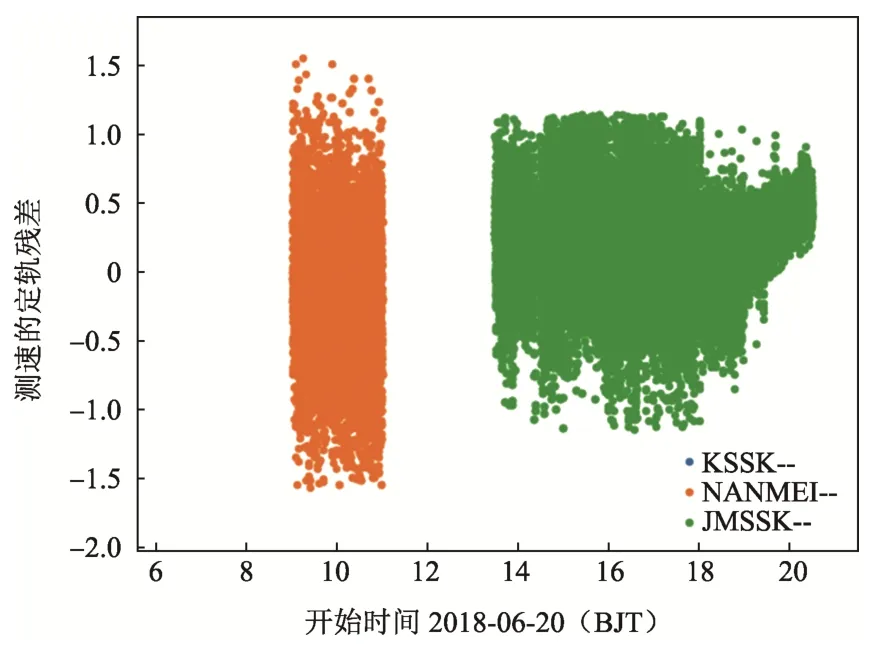
图5 JMS/KSH/NANMEI 测速联合定轨残差Fig. 5 Combination orbit determination residual based on velocity measurement of JMS, KSH, NANMEI stations
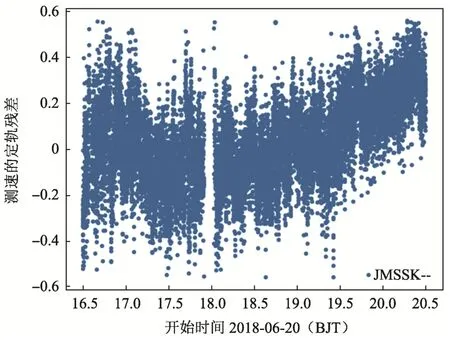
图6 IMC提取的多普勒测速联合定轨残差Fig. 6 Orbit determination residual based on Doppler velocity measurement by IMC
3 结 论
本文提出了一种高精度测速方案,基于深空测控干涉测量系统,通过“嫦娥4号”中继星测量试验分析表明,基于本方案获取的中继星多普勒频率提取精度为10 mHz 水平,联合定轨多普勒测速精度为0.2 mm/s水平,有效验证了本方案的合理可行性。
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
燃料化学学报(2022年5期)2022-05-30
中国船检(2020年11期)2020-11-27
无线电通信技术(2019年1期)2019-12-24
太原科技大学学报(2019年6期)2019-11-18
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
中国科技纵横(2016年14期)2016-10-10
太空探索(2016年12期)2016-07-18
海军航空大学学报(2015年1期)2015-11-11