一种应用于实时深空干涉测量的电离层时延修正方法
2019-09-02 00:34韩松涛谢剑锋
深空探测学报 2019年3期
韩松涛,谢剑锋,王 美,李 黎
(1.北京航天飞行控制中心航天飞行动力学技术重点实验室,北京100094;2.中国科学院国家天文台,北京100012)
引 言
“嫦娥4 号”中继星于2018 年5 月21 日发射,运行于地月拉格朗日L2点的Halo轨道,为后续着巡组合体月球背面软着陆巡视勘察提供测控通信中继服务[1]。中继星搭载S频段DOR侧音转发器,用于支持地面测控系统进行DOR/△DOR跟踪测量,相对于以往“嫦娥3 号”,再入返回飞行试验任务的X 波段观测,S频段信标受电离层时延的影响更为明显,对深空测控干涉测量系统的高精度实时测量提出进一步挑战。
深空测控干涉测量系统于2013 年初步建成,目前已形成以佳木斯66 m、喀什35 m、南美撒帕拉35 m深空测控天线以及位于北京航天飞行控制中心的中国深空网干涉测量中心为主体的布局,此外纳米比亚18 m 测控天线也配置了干涉测量采集终端,并开展了验证性测试[2-3]。测控天线主要承担航天器的遥测、遥控任务,因此干涉测量通常采用稀疏标校模式[4-5],即在组成基线的两测站入站前、以及出站后进行射电源标校,对实时测量而言,只能采用“射电源-航天器”(Quasar-Spacecraft,Q-S)标校跟踪模式,以佳木斯—喀什基线为例,标校射电源与中继星的跟踪时间间隔通常在5~6 h 左右。相对于标准△DOR 模式采用的小角距、短时交替模式,测控干涉测量系统的“射电源-航天器”跟踪模式无法实现测量误差的时间域、空间域约束,原理上已无法通过射电源标校实现介质时延的高精度修正。
本文在分析电磁波经电离层传播的延迟机理及特性基础上,结合历史观测数据,评估验证区域天顶向TEC(Total Electron Content)的周日特性,依托深空干涉测量中心数据处理设备,给出了实时干涉测量的电离层时延修正方法;并基于任务期间的实测数据处理分析,对比验证本文提出的电离层修正方法的有效性。
1 电离层时延特性分析
1.1 基本概念
电离层通常是指从地面60~70 km 以上至约1 000 km 的大气层,太阳使该区域的大气发生电离,从而具有密度较高的带电粒子,对无线电信号产生折射、反射、散射以及吸收等作用。无线电信号穿过电离层时,传播速度会发生改变,传播路径也会发生弯曲,产生时延效应[6],电离层的折射使电磁波相位传播速度(相速)加快,波内能量速度(群速)减慢[7]。
电离层群时延可表征为[8-9]

其中:TEC表示沿电磁波传播路径的电子总量,即底面积为1 m2贯穿整个电离层柱体内所含的电子数。通常以TECU 表示TEC的单位,1TECU=1 × 1016电子数/m2。
1.2 TEC周日特性分析
电离层受太阳辐射、地磁活动等多种控制因素的影响,其中,太阳活动对TEC的影响最显著。电离层的电子浓度受太阳辐射的影响随着地球自转而不断变化,使得TEC具有明显的周日变化特性[10],图1 显示了喀什深空站通过布置双频GPS 接收机获取的连续10 余天的TEC量值(已转化为天顶向的VTEC,起始时间为BJT:2018-05-18 00:00:00),采样点间隔为60 s,个别间断数据由于记录数据不完整引起。
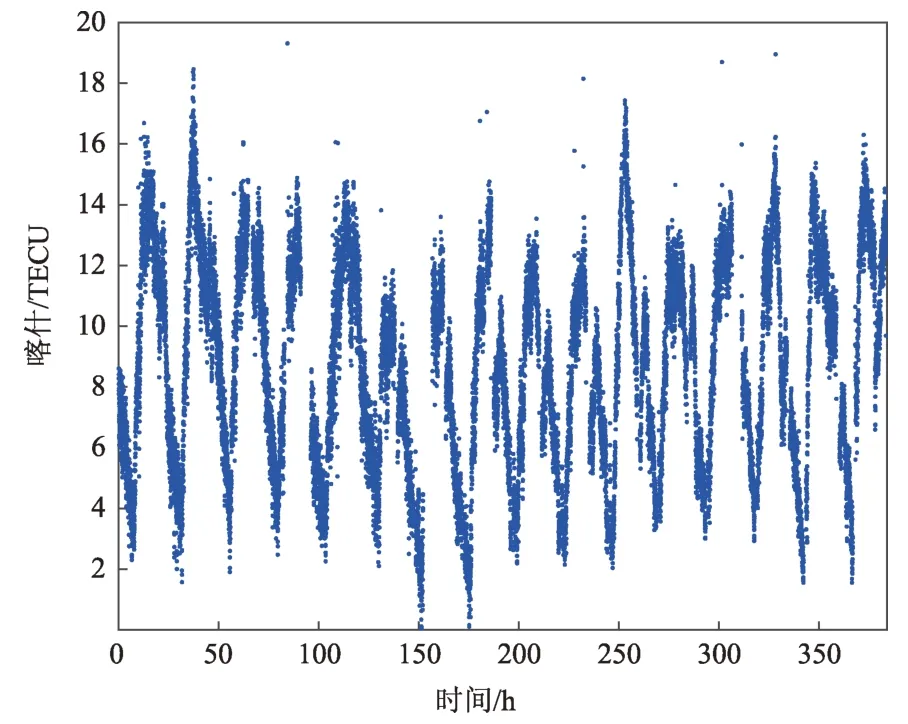
图1 喀什深空站实测TEC量值统计Fig. 1 TEC Value of KSH deep space station
由图中TEC的分布特性,可观察到TEC存在较为明显的周日变化特性,利用自相关分析方法验证此周日特性。自相关函数反映了信号与其本身在不同时刻的相似程度,是一种时间域的统计度量方法,归一化的自相关函数定义为

其中:R(t,0)表示信号与其本身在同一时刻的相关函数值,对于随机信号这一值为最大值,而对于周期信号,这一函数值理论上应表现出一定的周期特性。以喀什深空站记录数据为例,图2显示了归一化自相关函数图。对自相关函数进行FFT(Fast Fourier Transformation)变换,分析主要周期分量,可知在1.158 8×10-5Hz 处,存在明显峰值,对应的周期值为1/1.158 8×10-5=86 296 s,验证了TEC的周日变化特性,此外,电离层还有着明显的太阳周循环变化、年变化、季节变化等长周期特性[11]。
2 处理方法流程
在电离层特性分析基础上,基于周日变化特性,依托深空干涉测量中心数据设备软件系统,设计实时深空干涉测量电离层时延修正方案如下:
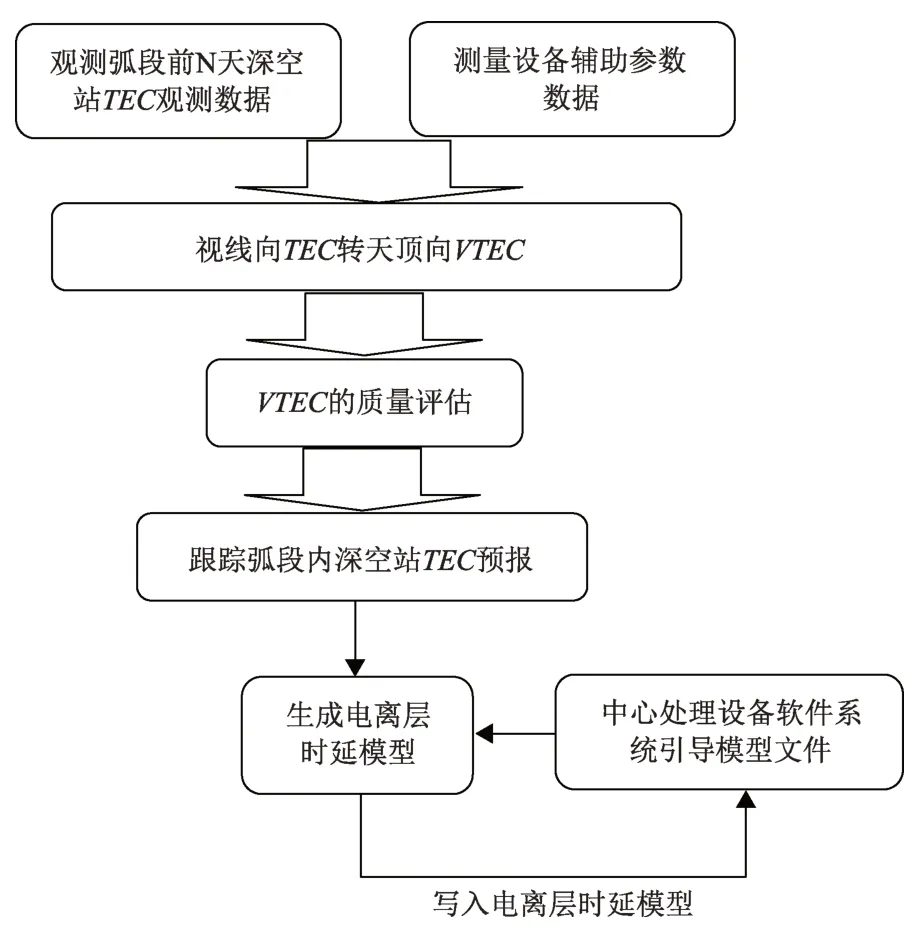
图3 处理方法流程图Fig. 3 Flow chart of processing algorithm
图4以喀什深空站2018年5月26日为例,显示了应用本文论述的方法获取的电离层预测值TECP与实际值TECC的比较,其中定义预报精度如下

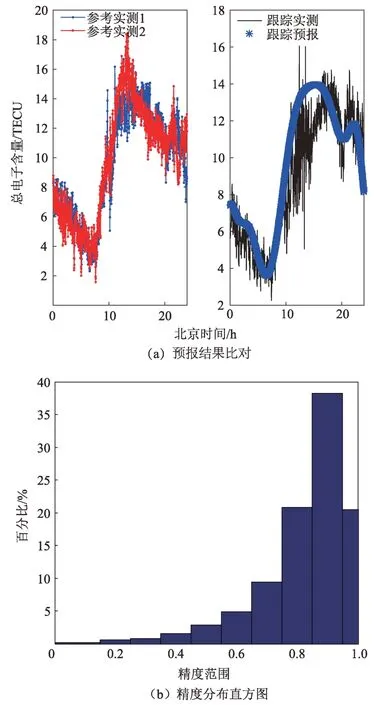
图4 预报精度分析Fig. 4 Prediction accuracy analysis
统计分析表明,约75%以上的数值预报精度>80%,而低预报精度的数值多是由于实测参数值的噪声引起。
3 实验结果比对分析
选取2018年5月22日中继星地月转移弧段的跟踪过程为例,对比分析本文算法对实时测量精度的改进情况。表1 统计了该跟踪弧段的目标跟踪参数情况,其中采样带宽2 MHz,2 bit量化,VSI记录格式。
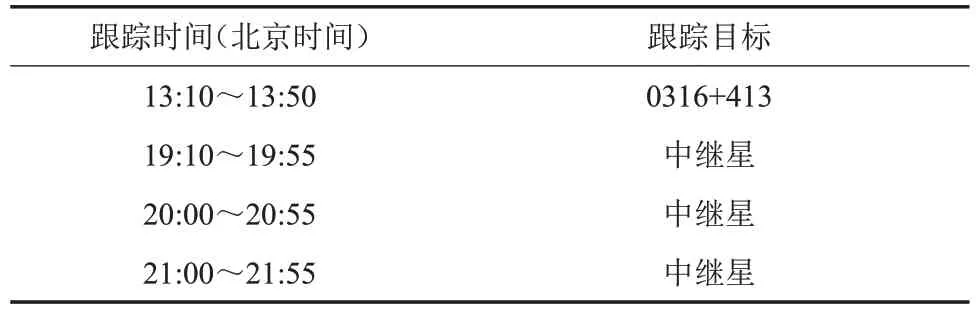
表1 干涉测量系统参数Table1 Interferometric tracking parameters
图5(a)比较了原始处理系统的时延测量结果与理论真值的差异(图中蓝色线条)以及本文方法最终获取的时延结果与理论真值的差异(图中红色线条),其中利用环境参数实测数据的事后处理时延结果作为理论真值。
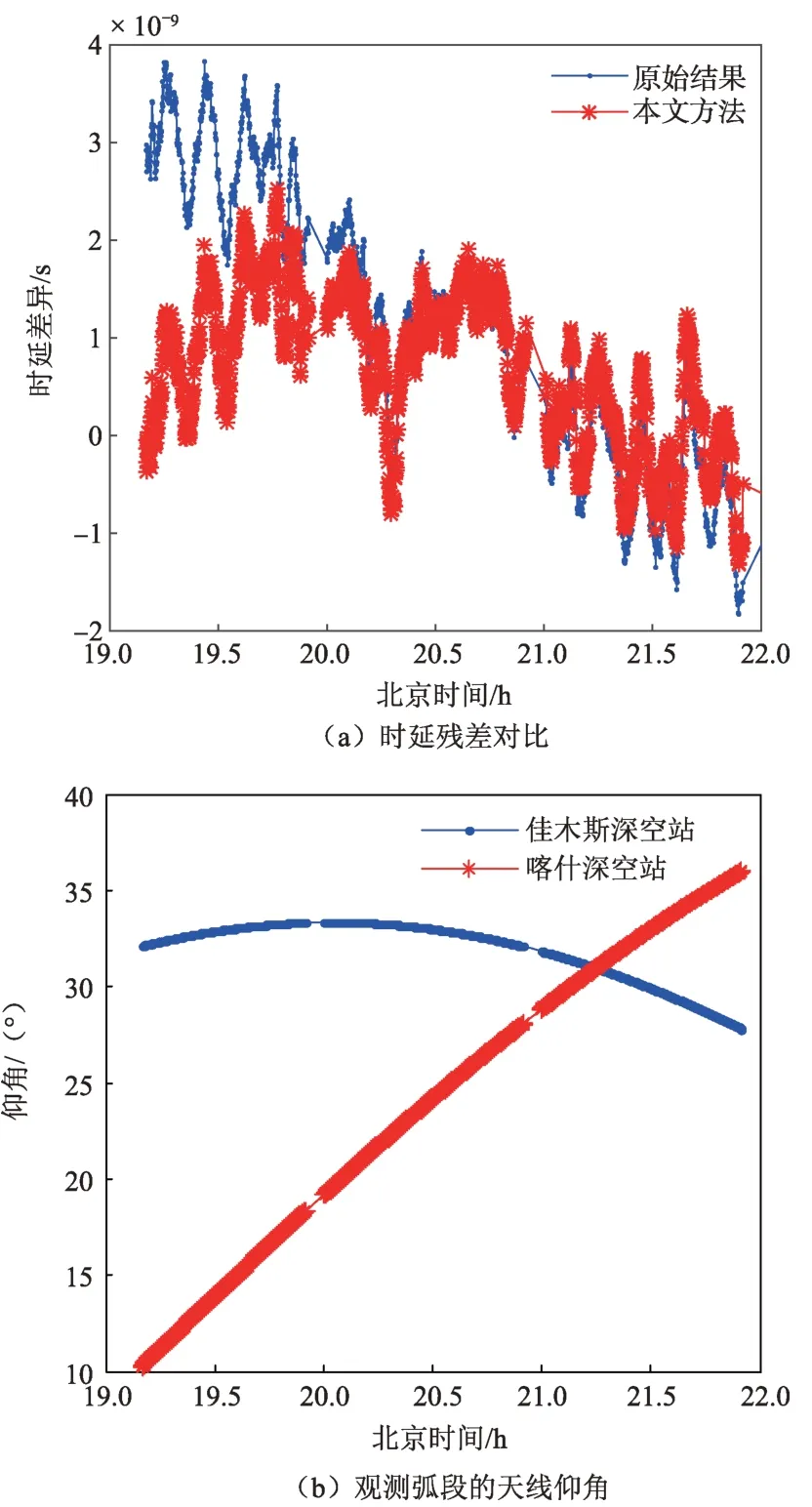
图5 比对分析Fig. 5 Comparison analysis
本文方法可以明显改进时延观测量精度,在低仰角弧段改进优势更为明显,如图5(b)中19:10~19:40弧段内喀什深空站的仰角在15°以下(佳木斯站整个跟踪弧段的仰角约在30°),改进程度约在1~3 ns;在高仰角情况,改进程度原理上受基线测站分布构型影响,即与测站天顶向电离层的差分VTEC有关。以事后实测介质修正结果作为参考基准,可以看出采用电离层周日变化相关性分析方法未能有效预报出电离层的高频波动(10~12 min 量级,峰峰值± 0.5 ns),但是仍可以修正电离层时延的主要趋势量。需要说明的是,通过引入电离层时延修正,一方面直接修正航天器跟踪弧段期间的时延观测量;另一方面通过对标校射电源的修正,从而提升由标校射电源获取的系统时延参考值的精度。
4 结 论
本文针对深空测控干涉测量系统实时测量问题,依托深空站配置的环境参数测量设备,基于电离层周日变化相关性,设计实现了一种区域电离层时延短期预测及修正方法。该方法简洁明晰,且充分利用了测站配置资源,该方法性能受基线测站构型、天线指向角、测站天顶向电离层特性、以及跟踪弧段等因素影响,在“嫦娥4号”中继星工程任务中得到了初步验证应用,针对本文试验示例情况,可改进测量精度1~3 ns。需要指出的是,电离层特性与太阳活动、地磁等关系密切,需要进一步开展深入研究和大量验证,以提升工程应用的可靠性和稳定性。
猜你喜欢
电子设计工程(2022年24期)2022-12-23
中国三峡(2022年6期)2022-11-30
现代工业经济和信息化(2022年9期)2022-11-03
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
计算机技术与发展(2020年4期)2020-04-30
电加工与模具(2020年2期)2020-04-29
音乐天地(音乐创作版)(2017年10期)2018-01-25
雷达学报(2017年6期)2017-03-26
导航定位学报(2015年2期)2015-06-05