中国深空探测任务轨道控制技术综述
2019-09-02 00:34陈莉丹谢剑锋
深空探测学报 2019年3期
陈莉丹,谢剑锋,刘 勇,陈 明
(北京航天飞行控制中心,北京100094)
引 言
20 世纪50 年代出现的航天技术,开辟了人类探索外层空间活动的新时代。经过半个世纪的迅速发展,人类航天活动取得了巨大成就。根据探测目标和任务的不同,航天活动主要分为三大领域——地球应用卫星、载人航天和深空探测。深空探测是指人类对月球以及更远的天体或空间环境开展的探测活动[1],作为人类航天活动的重要方向和空间科学与技术创新的重要途径,是当前和未来航天领域的发展重点之一。人类开展深空探测活动,可以解答地球、行星和太阳系的形成和演化等问题,帮助开发和利用空间资源并寻找可能存在的地外生命。深空探测活动能够促进工业技术的进步,不仅象征着一个国家的科技水平和综合国力,更直接和间接地促进国家军事科技的进步,有着重要意义。
自1958 年美国发射了世界上第一颗月球探测器以来,人类对月球及以远的深空探测已有200 余次,实现了对太阳系八大行星以及小行星的探访,取得了多项技术跨越和科学成果[2]。除了美国、前苏联/俄罗斯、欧洲航天局(European Space Agency,ESA)等航天强国和组织,日本在小行星探测方面取得了很大成功,印度在2013 年实现了火星探测。近年来,国际合作成为深空探测重要发展趋势之一,韩国、阿联酋等国家也在积极谋求深空探测的国际合作,以提升其国家的科技水平和国际地位。
探月计划拉开了我国深空探测的序幕,“嫦娥1号”首次实现绕月飞行,“嫦娥2 号”首次进行我国日地系平动点飞行并且飞越探测图塔蒂斯(Toutatis)小行星,“嫦娥3 号”实现了月球着陆,“嫦娥5 号”再入返回试验器实现了第二宇宙速度的精确再入返回,“嫦娥4 号”首次实现月球背面着陆,即将发射的“嫦娥5号”将实现月面采样返回,标志着我国基本实现对月球“绕、落、回”三步走的目标[3]。我国探月成功实施过程中,突破了一系列关键技术,包括月球探测轨道设计与优化、地月空间精密定轨技术、高精度轨道控制技术、能源与推进、远距离测控通信技术等。其中,探月工程的轨道控制主要包括实现任务各个阶段目标轨道参数要求的变轨控制、环月阶段工作轨道的维持控制、月面上升器和轨道器的交会对接控制以及返回器的高速再入返回控制。我国探月工程的轨道控制采用地面测控系统和星上自主控制两种模式,在交会对接近距离导引交会段、着陆器动力下降以及卫星达到再入入口点后的返回控制采用自主导航自主控制模式,其余各阶段采用以地面测控系统控制实施为主的模式。基于地面测控系统实施轨道控制的流程为:采集测站测量数据-精密轨道确定-轨道控制规划-实施上行注入-控制机构执行-控后精密轨道确定-轨道控制效果标定,其中轨道控制规划是核心工作,主要是依据控前精密轨道、控制执行机构推进系统参数,利用一定的控制算法和优化算法,在满足测控、能源等多种约束的条件下,确定推进系统发动机开机时刻、开机时长、速度增量、控制过程姿态等,使控制执行后达到目标轨道要求。高精度的轨道控制是成功完成探月工程任务的基本保障。
本文以我国探月工程各次任务为脉络,简述了历次任务轨道控制的目标和实施效果,总结了主要技术创新,在此基础上,展望了我国未来深空探测轨道控制技术的发展趋势。
1 探月一期任务轨道控制
1.1 “嫦娥1号”任务
“嫦娥1号”卫星于2007年10月24日由“长征3号”甲(CZ-3A)运载火箭发射升空,在地月轨道间飞行近12 天后,于11 月5 日进入月球捕获轨道,实现环月飞行,成为我国首颗月球卫星[4]。卫星2007年11 月7 日进入环月使命轨道后,累计正常环月飞行480天,圆满完成了以获取月面全图为主要目标的各项科学试验任务,为我国探月工程后续任务的相关关键技术实施了难得的先期验证、获取了珍贵的实战数据。2009年3月1日卫星成功受控落月[5]。
1.1.1 轨道控制过程
“嫦娥1 号”卫星整个飞行过程分成4 个轨道段:调相轨道段、地月转移轨道段、月球捕获轨道段、环月轨道段[4](见图1)。
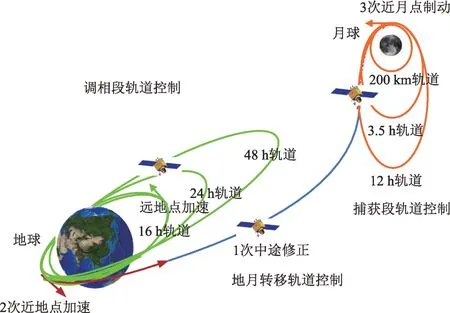
图1 “嫦娥1号”任务轨道示意图Fig.1 Trajectory sketch of CE-1 mission
1)调相段
为了增加我国首次探月任务的可靠性,提高地月转移控制的精度,“嫦娥1 号”任务设计了调相轨道段。综合考虑发动机控制重力损耗以及地面测控需求,调相轨道分为周期16 h轨道、24 h轨道和48 h轨道。由于中间安排了24 h的轨道,可以比较方便地解决发射日期后延的问题。
调相轨道控制包括1 次远地点控制和3 次近地点控制;入轨后第2 远地点将轨道近地点抬高至600 km,改善后续轨道近地点控制的测控条件;第4和第7近地点将16 h轨道依次抬高为24 h轨道和48 h轨道,最后在第8近地点控制卫星在预定地月转移轨道入口时刻进入地月转移轨道。调相段的轨道控制为特殊点(轨道近远地点)变轨,控制目标为轨道周期或半长轴,控制参数计算方法采用特殊点的轨道高斯摄动方程获得初值,考虑有限推力进行微分改正的算法。
2)地月转移段
地月转移飞行约4.5 天。期间安排3 次中途修正控制,控制目标为卫星到达近月点的目标轨道高度(200 km)和倾角(90°)。中途修正采用线性摄动方法。月球探测器转移轨道的终端状态为初始状态的函数,初始参数对应的终端参数与目标终端参数存在一定偏差时,通过迭代计算,可得到修正终端参数偏差所需的初始参数修正量。终端参数采用分层求解的方法,外层瞄准轨道B平面参数,内层瞄准近月距和轨道倾角。该方法解决了中途修正算法的收敛范围和收敛速度的技术难题[6-7]。
3)月球捕获段
“嫦娥1号”由于受到平台发动机的限制,为了减少发动机点火时长来降低重力损耗,捕获控制安排3 次进行。第1 次近月制动,卫星由月心双曲线轨道进入周期为12 h的环月轨道;第2次近月制动,卫星进入周期约为3.5 h的环月轨道;第3次近月制动,远月点高度约为200 km。
4)环月轨道维持段
环月轨道高度维持在200±25 km 圆轨道。环月工作轨道为2 个恒星月、619 圈的回归轨道,第1 条轨迹处于第1 个月的两条轨迹的中间,通过轨迹控制,使相邻两条轨迹间的间距约为17.7 km,满足有效载荷对轨迹的需求。
1.1.2 轨道控制的实际执行效果
在航天测控任务中,对轨控效果进行标定并合理利用可以实现更为精准的轨道控制。在“嫦娥1号”任务中,设计了一种综合利用控前控后精密轨道、轨控过程遥测姿态数据、遥测加速度计测量数据对沉底发动机、轨控发动机、加速度计刻度系数进行标定的方法,并将标定结果用于后续轨道控制注入,明显提高了轨道控制的执行精度[8]。
在任务中,通过对第1 次和第2 次调相控制的标定,得到了加速度技刻度系数0.2%的偏差,并将标定结果用于后续的控制执行,后续轨道控制执行精度有了明显的提高。
1.1.3 “嫦娥1号”月食期间调相控制
在“嫦娥1 号”环月工作过程中,计算分析了月食期间卫星进出阴影的情况,提出了卫星相位调整的控制方案,通过轨道相位调整缩短卫星在月食期间处于阴影区时间。通过调相控制,4 h 月影缩短为2 h,为“嫦娥1 号”安全度过月食提供了保障[9](见图2)。

图2 “嫦娥1号”月食调相示意图Fig.2 Sketch of phasing control in Lunar eclipse
1.2 “嫦娥2号”任务
“嫦娥2 号”卫星于2010 年10 月1 日由“长征3号”丙(CZ-3C)运载火箭直接发射进入地月转移轨道,经过3 次近月制动和1 次轨道面的调整,10 月6日准确进入了100 × 100 km 的环月工作轨道[10](见图3)。
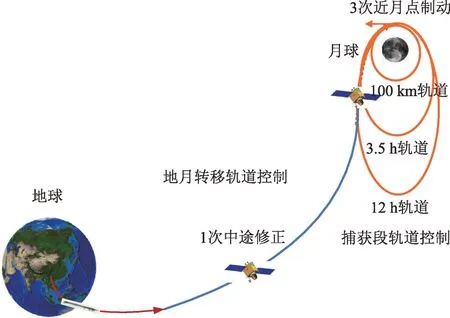
图3 “嫦娥2号”任务轨道示意图Fig.3 Trajectory sketch of CE-2 mission
1.2.1 “嫦娥2号”轨道控制的特点
“嫦娥2 号”卫星在轨道设计与控制方面与“嫦娥1号”相比有以下不同。
1)运载火箭“长征3 号”丙替代“长征3 号”甲,运载能力的提高可以实现将卫星直接送入地月转移轨道,省掉了地球出发调相阶段。在“嫦娥2 号”任务中,由于延续使用轨控标定结果,控制执行精度与“嫦娥1号”任务相当,地月转移段在安排大量姿态调整的情况下,仅采用一次中途修正即实现了月球捕获轨道要求。
2)环月工作轨道高度由200 km降为100 km,月球捕获控制风险增大。
3)为保证到达虹湾成像时间条件,增加一次轨道平面修正,同时兼顾降低轨道高度。
4)依据任务对虹湾成像需求,安排了100 ×15 km轨道机动和快速测定轨技术。采用了非对称降轨控制方法,解决了降轨后近月点漂移加速、对称降轨关机点不可见等飞控难题,降低了卫星降轨撞月风险。
1.2.2 “嫦娥2号”的拓展任务轨道控制
2011 年4 月1 日“嫦娥2 号”卫星圆满完成了各项预定任务。为最大限度发挥卫星的作用,深化和拓展月球及深空探测成果,“嫦娥2 号”执行了日地系拉格朗日L2 点驻留和飞越观测图塔蒂斯小行星的拓展任务(见图4)。与正常任务相比,“嫦娥2 号”拓展任务的轨道设计与控制更具有挑战性,在我国深空探测任务中具有里程碑意义。
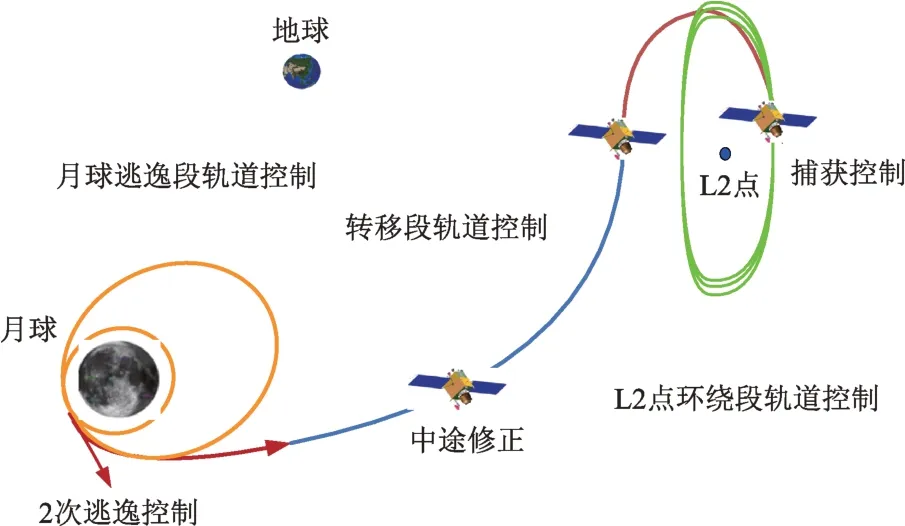
图4 “嫦娥2号”日地L2点轨道控制示意图Fig.4 Trajectory sketch of Sun-Earth L2 libration point exploration
飞往L2 点探测试验飞行过程包括月球逃逸段、转移飞行段、L2 点环绕段3 个阶段[11];卫星从100 km环月轨道上分别在2011年6月8日和9日经过2 次逃逸控制进入转移轨道,第1 次加速控制将100 km 近圆控制为近月点104 km 远月点3 565 km 椭圆轨道,运行约5圈后第2次加速控制使卫星进入飞往L2 点的转移轨道。转移飞行期间在6 月20 日进行了1 次中途修正,经过约85 天左右到达L2 点附近,在8 月25 日经过1 次捕获控制捕获成Lissajous 轨道,并在此轨道上环绕L2点运行。环绕L2点的Lissajous轨道基本参数为:x方向的振幅约29 万km,y方向振幅约90万km,z方向振幅约39万km,轨道的拟周期约为180天。
任务中,在满足能量、光照和测控等多种约束的条件下,建立了变推力轨道控制模型,制定了多约束条件下的多级逃逸控制策略,保证卫星精确进入前往L2 点的转移轨道;中途修正控制采用标称轨道控制算法和轨道重构控制算法,利用共线平动点轨道控制的逐级微分改正法,实现了中途修正和目标轨道维持的能量最优化。轨道控制采用了不调姿策略,实现了月球逃逸、转移与L2 点轨道维持的高精度控制,大大优化了飞行控制流程,使原定的4 次转移中途修正减少为1 次;原定每1~2 月进行一次的轨道维持,实际任务L2 点绕飞近8 个月时间,仅在2011 年11 月30 日进行了一次轨道维持。
在完成对日地L2 点的绕飞后,为进一步发挥“嫦娥2号”卫星的性能,决定控制“嫦娥2号”卫星飞离日地L2点,探测小行星图塔蒂斯。任务包括L2点逃逸段、转移轨道段和最终飞越瞄准段[12]。卫星于4 月 15 日和 6 月 1 日实施了 2 次飞离 L2 点的控制,在转移轨道飞行过程中分别在7月31日、10月9日和11月30 日进行了3 次中途修正。最后在12 月12 日实施了一次飞越瞄准控制,“嫦娥2号”最终于2012年12月13 日与小行星交会,成功获取了图塔蒂斯小行星近距离清晰图像(局部分辨率达5 m),在世界上首次实现了对图塔蒂斯小行星近距离(3.2 km)光学清晰成像(见图5)。
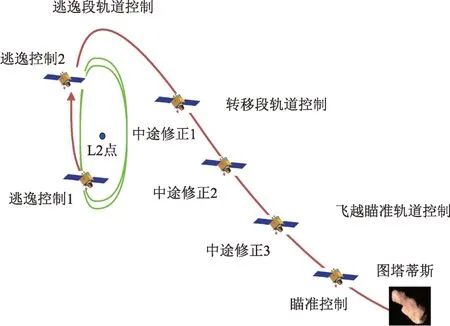
图5 “嫦娥2号”飞跃图塔蒂斯小行星轨道控制示意图Fig.5 Trajectory sketch of Toutatis exploration
“嫦娥2 号”飞越小行星的两次逃逸控制采用联合规划策略,4月15日的控制目的是将卫星控制到一个过渡的Lissajous 轨道,6 月1 日的控制目标是北京时间12月13日16:30与图塔蒂斯交会。控制策略的规划采用遍历搜索和微分修正相结合的方法,实现了满足地面测控和卫星状态检测等多方面因素约束的能量最优控制。满足剩余燃料的极限约束,通过选择合适的控制目标变量以及约束控制变量的修正量,实现控制变量的高精度快速求解。
2 探月二期任务轨道控制
2.1 “嫦娥3号”任务
“嫦娥3 号”探测器于2013 年12 月2 日由“长征3 号”乙(CZ-3B)运载火箭发射升空,是我国第一个软着陆月球探测器。探测器系统由运载火箭直接送入地月转移轨道,经过2次中途修正,飞行约5天左右后到达100 km高的近月点,经过1次减速制动成极月圆轨道。运行约3 天后在月球背面进行降轨控制,将轨道的近月点降低到约15 km,在100×15 km轨道上运行4天后,于12月14日动力下降,约720 s后着陆到月面虹湾着陆区(参见图6)。
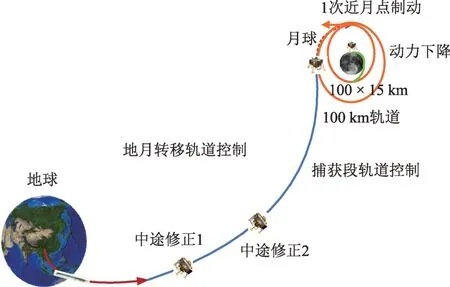
图6 “嫦娥3号”任务轨道控制示意图Fig.6 Trajectory sketch of CE-3 mission
2.1.1 “嫦娥3号”轨道控制的特点
“嫦娥3号”使用的“长征3号”乙运载火箭,发射入轨精度达到国际先进水平,但“嫦娥3号”探测器平台搭载7 500 N大发动机,为了对全新发动机进行在轨控制标定(使得7 500 N 发动机点火时长大于10 s),设计了中途修正联合控制方案。第1次中途修正设置控制开机时长固定为10 s,第2 次中途修正瞄准近月点的目标轨道高度(100 km)和倾角(90°)。
“嫦娥3 号”的近月制动由7 500 N 发动机实施。采用1次控制将相对月球的双曲线轨道控制成100 km左右的近圆轨道,制动速度增量约829 m/s。同时,控制规划通过优化动力下降时刻比标称状态提前6 min,增加动力下降前的测控弧段,并实现环月降轨关机后2 min探测器出月球遮挡区,保障了最优的测控条件。
环月降轨控制按照从动力下降初始点至着陆区的航迹高程确定控制目标。采用半长轴与近月点参数组合控制的方法可以用来消除或部分消除近月制动时半长轴误差造成的动力下降点速度的偏差。4天后的动力下降主要依靠星上自主控制系统实施。
动力下降起始点的圈号根据测控、光照、着陆区等多种约束确定。动力下降起始时刻根据当前轨道、质量和目标落点纬度,估算航程和动力下降点的纬度等多种约束确定。
2.2 “嫦娥4号”任务
“嫦娥4 号”任务包括两次发射,首先在2018 年5 月21 日采用“长征4 号”丙(CZ-4C)从西昌卫星发射中心发射中继星,同时搭载哈尔滨工业大学研制的两颗小卫星(月球轨道超长波天文观察卫星:A星和B 星)以及一颗外星。然后于2018 年12 月采用“长征3 号”乙改二型(CZ-3B/G2)于西昌卫星发射中心发射“嫦娥4号”探测器。
2.2.1 “嫦娥4号”轨道控制的特点
“嫦娥4号”探测器的飞行过程与“嫦娥3号”基本相同,在100×15 km 环月椭圆轨道上实施动力下降,但着陆器选择在月球背面冯·卡门撞击坑软着陆。较先发射的中继星具备自主跟踪着陆器的能力,支持着陆器运行至月球背面时的前向/返向实时和延时中继通信;动力下降段支持对着陆器前向/返向实时中继通信,为“嫦娥4号”首次实现人类月球背面软着陆提供了可能。
与“嫦娥3号”只要求着陆器着陆至预定落区不同,“嫦娥4号”任务由于冯·卡门撞击坑范围较小,提出了定点着陆的需求,同时为保证测控资源和月面工作时间,对着陆时间也提出了限制,即要求定时定点着陆,大大增加了“嫦娥4号”探测器动力下降点轨道控制的难度。在任务中,采用了从近月制动至动力下降一体化轨道控制策略,在近月制动过程中引入偏航姿态并对半长轴进行控制,在环月修正过程中对轨道平面和周期进行控制,在环月降轨对半长轴、偏心率和幅角进行联合控制,以保证在各个阶段都能够满足定点定时着陆的控制目标并节省推进剂,为任务成功提供了保证。
2.2.2 “嫦娥4号”中继卫星轨道控制
“嫦娥4 号”中继星整个飞行过程分成5 个轨道段:地月转移轨道段;月球制动及借力阶段;月球至地月L2点转移阶段、地月L2平动点轨道捕获段和使命轨道工作段(参见图7)。
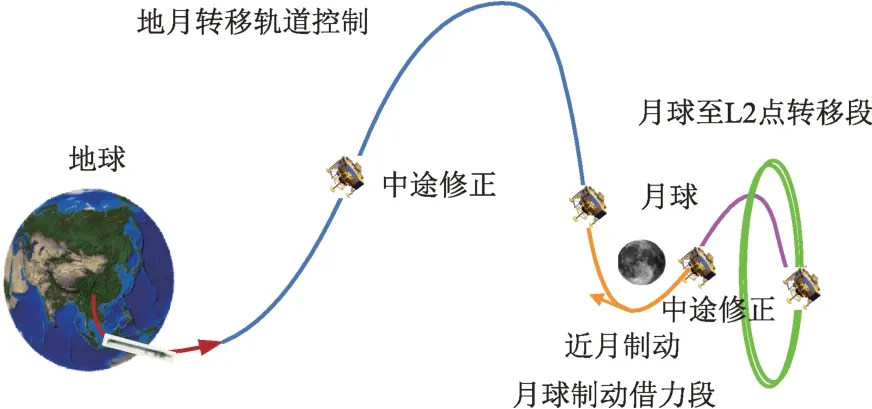
图7 “嫦娥4号”中继星轨道控制示意图Fig.7 Trajectory sketch of CE-4 mission
“嫦娥 4 号”中继星于 2018 年 5 月 21 日凌晨 6 时左右入轨,在入轨后17 h进行了1次地月转移段中途修正,于5月25日晚进行了近月制动控制,经过月球动力借力飞行,在5 月27 日晚进行了1 次月球至L2点转移段的中途修正控制,后经过6月8日和14日两次捕获控制成功进入使命轨道。
“嫦娥4 号”中继星采用了月球动力借力的转移轨道方式,实现了能量最优。突破了地月L2 点Halo捕获控制和使命轨道维持控制技术。提出的Halo 轨道品质评价参数,通过优化控制点Z向速度实现对轨迹重复性的精确控制,大大提高了控制计算的稳健性和灵活性。深入研究中继星不同工作模式下由太阳光压引起的角动量累积规律,为有效预测和利用卸载,提出了主动调姿卸载控制策略和基于偏置的维持和自动卸载联合控制策略,大大节省了推进剂消耗,延长了维持周期。跟踪标定分析中继星维持控制误差,提出通过偏置控制方法解决控制执行偏差较大的问题,大大提高了维持控制精度,控制偏差降低至毫米每秒量级,维持周期由原来的5~7 天延长至最长17 天。
3 探月三期任务轨道控制
3.1 “嫦娥5号”再入返回实验
“嫦娥5号”再入返回试验器于2014年10月24日由“长征3 号”丙(CZ-3C)运载火箭发射升空,直接进入绕月自由返回轨道,经过3次中途修正后,返回器于 11 月 01 日 5 时 53 分与服务舱分离,6 时 13 分到达再入点,精确着陆于内蒙古四子王旗的预选着陆点(参见图8)。
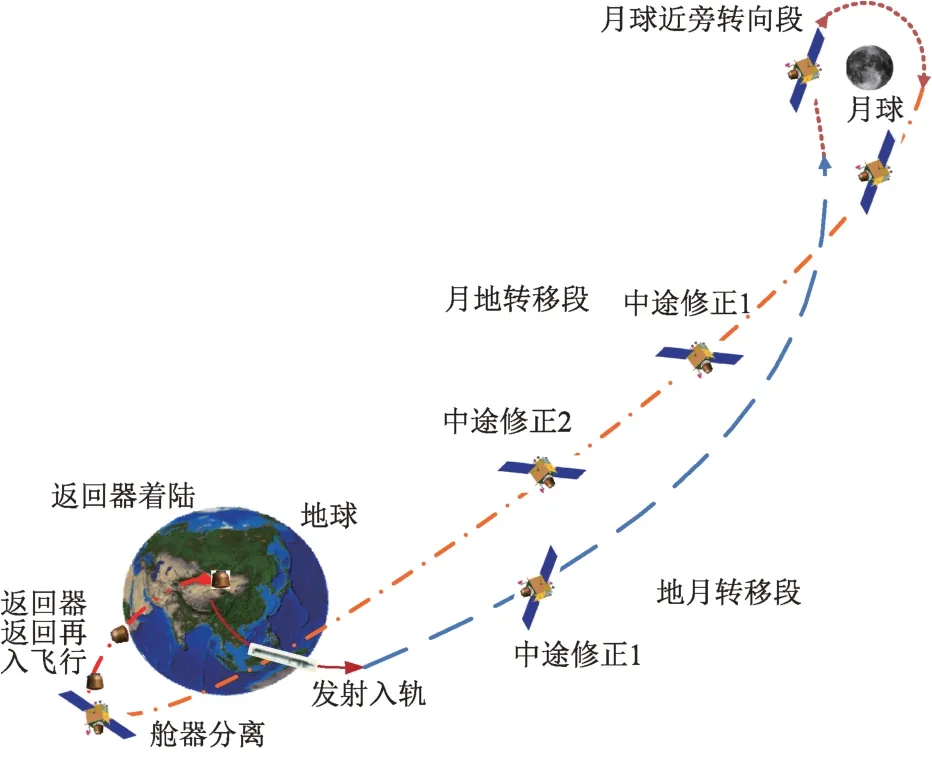
图8 “嫦娥5号”再入返回实验任务轨道示意图Fig.8 Trajectory sketch of CE-5 test mission
整个任务可以划分为发射段、地月转移段、月球近旁转向段、月地转移段、返回再入段和回收着陆段。试验器每次中途修正控制均瞄准再入点轨道参数,包括再入点高度120 km、地固系轨道倾角45°、地固系再入角-5.8°,并使得落点在再入时刻位于返回器位置速度确定的瞬时弹道平面内[13-14]。为提高控制参数计算精度,在计算控制参数过程中引入姿态喷气速度增量和两器分离速度。中途修正算法的基本原理与“嫦娥1号”至“嫦娥4号”中途修正相同,采用线性摄动微分改正方法,但与以往任务相比,自由返回轨道再入点对初始轨道参数极其敏感,收敛难度增大,所以任务中采用了分层多级修正策略,外层通过修正任务飞行时间来实现基于固定瞄准点的落点匹配,内层瞄准固定飞行时间的再入点参数,内层多级修正包括初始轨道到月球的Lambert变轨、基于奔月月球B平面参数的修正、基于返回地球B平面参数的修正、基于返回近地点参数的修正。该策略有效解决了任务中途修正控制计算收敛范围和收敛精度的难题。
服务舱和返回器分离后,开始独立飞行,经过规避机动控制后,进入拓展试验阶段。经过约6个月的飞行,服务舱顺利完成了5个阶段的拓展试验:大椭圆停泊轨道飞行段、地月转移段、地月L2点飞行段、近月制动段和环月飞行段。
4 我国深空探测轨道控制技术发展需求
4.1 我国深空探测发展目标
探月工程三期“嫦娥5号”任务即将在海南发射场利用“长征5号”运载火箭发射。探测器经过地月转移、近月制动、环月飞行、月面软着陆、样品采集和科学探测、月面起飞、月球轨道交会对接、月地转移、地球再入、着陆回收等过程,是我国迄今为止最复杂的航天活动,是我国探月工程实现“绕、落、回”目标的收官之战。
从探月工程的实施效果,可以看出,我国深空探测任务起步晚但起点较高,虽然探测任务次数少,但探测内容涵盖丰富,任务顶层设计、飞控实施精度、取得的探测成果均达到国际先进水平。通过探月工程的成功实施,突破了多项关键技术,建立了较为完善的工程体系,取得了一定的成就。但总体来看,深空探测能力与美国、俄罗斯、欧洲等航天强国和机构相比依然存在一定的差距。主要是探测目标比较单一,目前的探测活动均集中在月球,“嫦娥2 号”拓展任务仅实现了对小天体的飞越探测,还没有扩展到其它天体,使得对太阳系的认识和对探测技术手段的使用还比较局限。同时我们的邻国日本在小行星探测方面已取得很大成功,而印度在2013 年成功发射火星探测器后更是把增强航天能力作为实现强国梦想的捷径,所以必须加快深空探测任务的深度和广度,提升进入空间、利用空间能力、探索未知领域能力,促进我国科技进步以及提升国家创新能力。
目前我国已确立了深空探测的目标,在2030 年以前将按计划逐步实施对火星、金星、近地小行星、主带小行星、木星和太阳极区的多次探测任务。要实现深空探测跨越式发展,必须在深空任务顶层优化设计、星际轨道设计与控制、自主技术、推进技术、远距离通信技术等进行创新研究。
4.2 我国深空探测任务轨道控制技术需求
在深空探测亟需突破的关键技术中,星际轨道设计与控制技术是深空探测任务工程总体和各分系统的先导,在任务顶层优化设计中具有突出重要的地位。同时,在工程任务执行过程中也是任务成功实施的基本保障。
我国通过探月任务的实施,积累了一些经验。在轨道确定技术方面,首先在我国现有航天测控网USB(Unified S-Band)系统与射电天文观测网VLBI系统的基础上,通过集成创新,建立了USB-VLBI综合测定轨系统,在此基础上又突破了S/X双频地面测控设备和X频段数字化应答机研制、基于差分单向测距DOR 的干涉测量信号处理等难题,实现了X 频段高精度测距测速,实现了我国航天测控由S 频段向X 频段深空测控体制的技术跨越,进入了国际先进水平行列。高精度的地月系统定轨技术为任务轨道控制提供了最基本的保障。在轨道控制技术方面,突破了基于最小燃料和时间优化的全程轨道优化控制策略、基于月球B 平面和近月点参数的地月转移中途修正控制、月球引力场不规则条件下的轨道维持技术、强测控约束的近月点非对称控制技术、基于落点匹配和再入点参数的多级优化控制策略、多约束月球逃逸分级控制算法、基于标称轨道控制和轨道重构控制算法的共线平动点轨道控制策略、定时定点着陆控制技术等,但还不能满足未来我国深空探测任务的需求。
针对我国未来深空探测任务目标,结合目前发展现状,梳理出轨道设计与控制方面需提前进行攻关和开发的技术。
1)星际飞行轨道设计与控制
我国探月工程涉及的轨道控制技术大多局限在地月空间内,控制算法很多是近地卫星轨道控制算法的扩展,设计思路基本是先依据二体或圆锥拼接模型寻找初值,再在地月空间精确摄动模型下微分改正。虽然在“嫦娥2号”拓展任务控制过程中,解决了日地L2 点转移及绕飞控制技术,但火星探测和太阳系其它探测任务对轨道设计与控制提出了更高的要求,目前的控制算法存在一定的局限性。所以必须研究多体系统作用下的轨道设计方法,研究不规则弱引力场轨道设计与优化技术[15]。进入新世纪以来,出现了借力飞行轨道设计、低能量转移轨道、行星大气高速再入、无大气天体软着陆轨道设计和平动点应用技术等新设计概念和方法,美国、日本等已经将部分技术应用于深空探测任务中,取得了很好的效果。目前国内很多院校和科研机构也进行了大量研究,取得了很多研究成果,但研究存在与我国深空发射场、推进系统等实际工程结合不紧密,轨道设计与控制规划没有基于我国深空测定轨精度和特点等缺点,理论向工程的应用转化也存在不足,必须针对我国深空探测目标和实际情况开展深空探测轨道设计与控制研究,促进天体力学等基础学科中科研成果的应用、实践和发展。
2)针对新型推进系统的控制研究
推进技术一直是人类进入空间能力的决定性因素之一。深空探测任务由于目标天体距离地球遥远,对发射能量的需求很大,单独依靠提高运载发射能力很难满足所有的任务需求,因此探测器需具备较强的机动能力,往往需要提供数千米每秒以上的速度增量,而传统的化学推进比冲很难超过500 s,难以满足深空探测任务的需求[2]。因此亟需发展比冲更高、寿命更长以及性能更优越的新型先进推进技术。新型先进推进技术的主要类型根据能源输入的不同分为电推进、太阳能推进和核推进等;还有一类是有别于工质推进的新概念推进,如太阳帆推进、等离子磁帆推进技术等。推进系统是轨道控制规划的重要输入和约束,在新型推进系统中,一个重要类型是小推力推进系统,与传统的化学推进相比,电推进、离子推进等小推力发动机的比冲比传统化学能发动机高出至少一个数量级,可以减小航天器携带的推进剂质量,对提高航天器寿命,增加有效载荷质量,以及增强航天器的轨道机动能力具有重要意义。但由于推力小,控制过程时间增大,轨道参数的变化已不再遵循开普勒轨道特性,其动力学非线性强,通常呈多圈螺旋状,传统的基于脉冲控制的轨道控制规划方法已不能适用。必须针对新型推进系统开展轨道控制技术研究。另外,面对深空探测的不同推力方式组合优化控制方法也是一个需要研究的方向。
3)自主导航与控制技术
自主导航与控制技术也是我国继续推进深空探测任务广度必须突破的关键技术之一,主要包括导航信息处理、轨道自主确定、轨道自主控制及星历修正、姿态自主确定与控制等。深空探测器距离地球远、所处环境复杂,利用地面测控站进行轨道控制已经很难满足探测器控制的实时性和安全性要求。尤其在探测器接近目标天体和着陆等关键飞行阶段,不可能像传统航天器那样依赖于地面的测控,必须由探测器自主确定自身的位置和姿态,自主进行轨道控制的规划与实施。我国的探月工程中,在交会对接近距离导引交会段、着陆器动力下降以及卫星达到再入入口点后的返回控制已经对自主导航自主控制模式进行了探索,取得了一定成果,但导航精度和自主控制算法等方面还存在不足,需要进一步研究。其中,考虑深空轨道及姿态动力学,基于快速实现位置和姿态信息解耦,完成多约束条件下轨道姿态规划与执行是亟需攻克的关键技术,包括导航信息获取与目标特征识别,多源信息融合与轨道快速自主估计,深空轨道快速规划与自主机动执行等[16]。另外,还必须提高航天器的自主故障判断技术,提高轨道控制异常情况下的应急轨道重构能力,减少对地面的依赖。
5 结束语
深空探测作为人类航天活动的重要方向,是人类探索宇宙奥秘和寻求长久发展的必然途径,也是衡量一个国家综合国力和科学技术发展水平的重要标志。探月工程拉开了我国深空探测的序幕,“嫦娥1 号”至“嫦娥4号”以及“嫦娥5号”再入返回试验任务的成功实施,标志着我国已经掌握了深空探测的多项关键技术,获得了大量的科学成果,建立了较为完善的深空探测工程体系。深空探测轨道控制技术作为决定深空探测任务成败的关键技术之一,越来越多地受到关注并得到应用,成为各国深空探测技术研究和发展的热点。
本文以我国探月工程各次任务为脉络,简述了历次任务轨道控制的目标和实施效果,总结了主要技术创新。通过探月工程,我国的地月空间轨道控制规划技术以及任务控制执行精度均达到世界先进水平。但也应该清醒地认识到,对于月球以外的行星际探测还与航天强国存在一定差距,必须针对我国的具体国情,研究星际飞行轨道设计与控制、新型推进系统的控制技术以及自主导航与控制等关键技术,为我国后续深空探测任务提供高精度轨道控制技术保障。
猜你喜欢
学与玩(2022年6期)2022-10-28
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
中国船检(2020年11期)2020-11-27
摄影之友(影像视觉)(2017年1期)2017-07-18
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
制导与引信(2016年3期)2016-03-20
太空探索(2014年2期)2014-07-12