中国月球探测任务轨道确定技术及发展综述
2019-09-02 00:34段建锋曹建峰谢剑锋
深空探测学报 2019年3期
段建锋,张 宇,曹建峰,陈 略,陈 明,谢剑锋
(1.北京航天飞行控制中心,北京100094;2.航天飞行动力学技术重点实验室,北京100094)
引 言
月球探测是人类研究地球及其它自然天体形成与演化的重要手段,同时能有效地带动一个国家航天科技水平的提升[1]。我国以嫦娥系列月球探测任务为牵引,在月球探测相关的各个领域都取得了极大的发展。月球探测器轨道确定的能力也在历次任务的考验中得到了锤炼与提升。相比近地探测器,月球探测器轨道确定技术在实现上更为复杂,考虑的因素较多。对探测器的轨道确定是月球探测任务成败的关键,也是各种科学载荷探测任务顺利进行的前提。因此,对月球探测器的轨道确定技术研究是一项非常重要的基础性工作。
本文回顾了我国月球探测任务中轨道确定能力的发展历程,介绍了月球探测任务轨道确定技术最新研究进展和发展方向,分析了本领域未来面临的诸多困难与挑战。对后续深空探测任务的开展具有重要的指导意义。
1 中国月球探测任务发展历程
20 世纪90 年代,我国已经开始进行月球探测工程的先期研究。我国的探月工程,在2020 年前分“绕、落、回”三步实施,即“三步走”战略[2]。我国第一个月球探测器“嫦娥1 号”于2007 年10 月成功实施环月探测,圆满实现了探月工程一期“绕”的目标[3];2010 年 10 月,“嫦娥 2 号”探测器作为探月工程二期任务的先导星,成功完成了环月的先导探测,并完美地完成了多阶段拓展任务,通过一次发射任务完成了月球、日地拉格朗日L2 点、图塔蒂斯(Toutatis)小行星的多目标探测[4-6];2013 年12 月14日,“嫦娥3 号”探测器成功着陆月球虹湾地区,12月15日,“玉兔号”月球车与着陆器顺利分离,其行走的车辙印在了月球表面。“嫦娥3 号”任务圆满成功,首次实现了我国航天器在地外天体软着陆和巡视勘察[7],标志着我国探月工程第二步战略目标的全面实现。2014 年11 月1 日,“嫦娥5 号”高速再入试验任务的返回器在内蒙古四子王旗地区顺利着陆,标志着我国月球探测领域技术的又一次重大进步,拉开了我国探月工程第三期的序幕[8],“嫦娥4号”任务分为中继星任务和探测器任务两个阶段具体实施,分别于2018 年 5 月 21 日和 12 月 8 日发射升空,完成了人类历史上首次月背软着陆及巡视勘察,为中国探月树立了新的里程碑。
2 中国深空测控网建设与发展
深空测控网是月球探测的基础,在一定程度上能决定月球探测器轨道确定的精度。月球探测器的跟踪测量与低轨地球航天器不同,一般情况下,一个深空地面站在一天内有很长一段时间的观测弧段,因此深空探测中测控跟踪任务对地面观测站数量的要求并不高。但是由于信号传播距离遥远,对天线口径、接收器的灵敏性、发射器功率等都有很高的要求[9]。
2.1 深空网建设
伴随着我国月球探测工程的推进,测控系统的建设也不断完善,能力也在不断提升。实施我国首次月球探测任务时,已有的青岛、喀什等站组成二代统一S频段测控系统是针对近地卫星建设的[10],最远测控距离不超过8 万km,无法满足最远距离达40 万km的“嫦娥1号”的测控,通过在现有的设备上进行技术挖潜及引入具有非常高角度分辨率的天文观测系统-甚长基线干涉测量(Very Long Baseline Interfer‐ometry,VLBI)来完成相关的测控工作。通过探月二期测控系统研制建设,初步建成了以喀什35 m 和佳木斯66 m 深空站为主的深空测控网,航天测控能力实现了质的飞跃,从月球延伸到距离地球200万km以远的深空,成为继美国、俄罗斯和欧洲之后少有的具备独立深空测控能力的国家之一。通过探月工程三期测控系统的建设,完成了阿根廷南美35 m 深空站的建设,与国内两个深空站构成了全球分布的深空测控网。使我国成为继美国、欧洲后第3个建成全球布设深空网的国家[11]。
目前我国深空测控网布局如图1所示,分别是佳木斯、喀什和南美3个深空站;喀什、青岛和纳米比亚3 副18 m 天线可以协助跟踪;此外,由北京、上海、昆明和乌鲁木齐的4 个VLBI 观测站5 副天线组成VLBI 分系统进行补充,目前深空站测距、测速、VLBI 时延和时延率典型测量精度分别约为1 m,1 mm/s,1 ns和1 ps/s[12]。
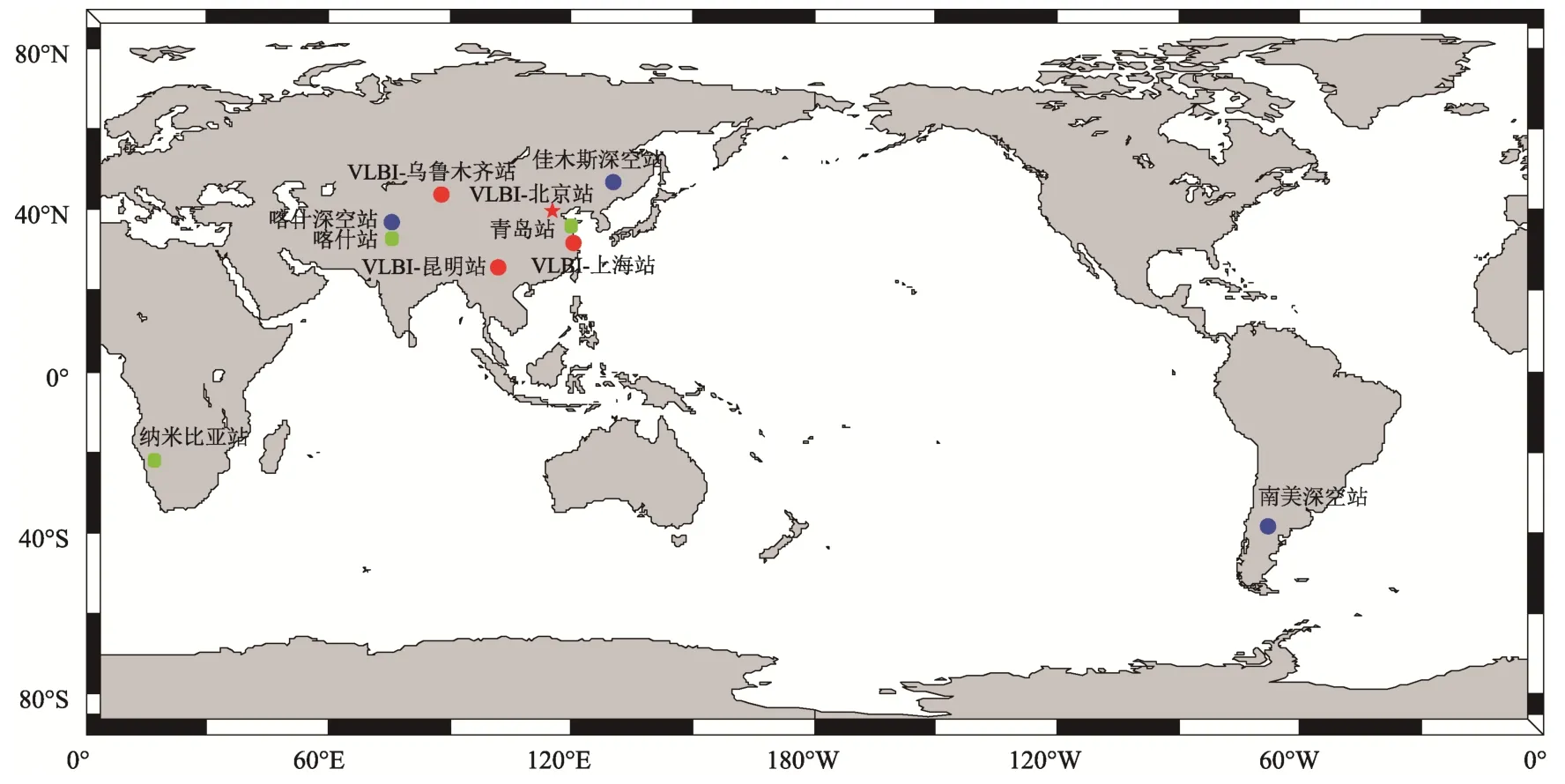
图1 我国深空站分布图Fig. 1 Distribution of chinses deep space station
2.2 测量技术
传统的深空测控无线电测量技术总的来说包含测距、测速与测角3种测量方式。随着我国探月工程的发展,新的测控技术也不断的被应用,对定轨精度的提升起到了重要的作用。
测距测量的是地面测站与航天器之间往返光行时,是一种利用无线电波在空间以恒速、直线传播原理的测量方式,包含侧音测距、音码混合测距和伪码测距等不同体质。在我国探月工程中常用的测距方式为使用侧音测距进行双程测距,在“嫦娥4号”中继星任务中首次进行了伪码测距的验证。在“嫦娥3号”任务中,为了完成探测器动力下降段轨道的实时监视,采用了三向测量的方法,解决了短弧条件下快速定轨定位的难题。而后,这一测量方法在探月任务中的多个阶段均有验证,作为双向测量的辅助手段提高了测量精度[13]。
在我国月球探测任务中主要采用的是多普勒测速方法,即测量探测器与深空站相对运动的径向速度引起载波上的多普勒频移,再由多普勒频移换算出速度。“嫦娥1 号”任务中,受限于测量频段、测站设备以及基带的处理能力,多普勒测速精度大约为1 cm/s。根据多普勒测速的原理[14],提高测距的频段可获得更高的测速精度,因此,在测控频段上正逐步由原来的S/C 频段向X/Ka 频段过渡,不断的提高多普勒测速的精度,“嫦娥2号”小行星探测试验后期,在S频段上,多普勒的测量精度约0.7 mm/s(1s积分周期)。在“嫦娥4 号”任务中,采用X 频段测量体制,多普勒测速精度优于0.5 mm/s(1s 积分周期)。除此之外,累积载波相位测速在月球探测任务中作为一种补充手段得到了较为广泛的使用。
对于月球探测任务,传统的测角方式已经不适用,一般采用干涉测量的方式实现,干涉测量是通过地面2 个测站组成一条观测基线,同时观测探测器,对接收到的信号进行相关处理后,精确获取由空间几何关系引起的航天器信号到达2个测站的时间差,进一步求出探测器的精确角位置信息[15]。VLBI 是目前国际上最先进、精度最高的空间测量技术,在“嫦娥1号”任务中就得到了有效的验证,随着探月任务的不断推进,VLBI 测量数据也逐步实现了实时传输,对任务支持力度越来越大。与此同时,新的测量体制也在不断探索,在“嫦娥3号”任务中,测量由差分单向测距/测速(DOR/DOD)提升为双差分单向测距/测速(ΔDOR/ΔDOD),测量精度也得到了进一步提升[16]。
在我国月球探测任务中,该测量主要由中国科学院VLBI 测轨分系统完成,深空测控干涉测量系统也参与干涉测量观测与数据处理[17-19]。在通过建立月球轨道动力学模型,USB与VLBI测量数据的融合加权处理和参数估计技术,实现了对远距离平缓轨道的短弧定轨、月球捕获快速定轨和绕月轨道的高精度定轨。
3 轨道确定技术的发展
月球探测器的轨道确定技术基本原理与近地探测器的基本一致,目前国内外主要航天机构均有自己独立的精密定轨软件平台[20-22]。月球探测器的轨道确定精度既与相应的深空测量网的跟踪精度、跟踪时长有关,又和时空参考框架及动力学模型精度息息相关。一般对于轨道确定技术的提升也从这些方面入手。
3.1 时空参考框架的改进
由于月球和月球探测器仍然处于地球的引力范围内,参考系的时间尺度仍可选择与地球卫星一致的地球动力学时,绕月探测器的运动在月心参考系中描述,参考原点选取在月球质心,根据基本平面选取的不同,可分为月心天球参考系与月心平赤道参考系。月球物理天平动会导致月球赤道面空间的摆动,采用不同的赤道面可以定义不同的月球参考系,在精度要求不太高时,可以使用国际天文学联合会(Interna‐tional Astronomical Union,IAU)定义的一套月球定向参数模型实现参考系之间的转换[23]。
地球定向参数(Earth Orientation Parameter,EOP)是地球参考架与天球参考架实时转换时的基础参数,是航天器轨道确定任务中不可缺少的重要参数,直接影响航天器轨道确定精度。陈略等[24-26]在地球定向参数高精度解算与预报方面,提出了EOP 解算优化策略、自适应双差分EOP高精度预报等方法,建立了EOP 解算与预报服务系统,每日在互联网上发布高精度的EOP 预报产品,并在实际的深空探测任务中得到了有效的应用。
在月球参考系下进行轨道确定,需要一个包括月球的位置、速度矢量与月球姿态(物理天平动)等信息的高精度的数值积分行星历表。美国、俄罗斯、法国和中国紫金山天文台都先后开展了相关的研究[27-28]。目前,在探月任务中使用的数值行星历表为JPL 提供的DE 历表,该历表已经发展至DE436。对于嫦娥探测器的轨道确定所采用的行星历表为DE423,其精度可以满足当前月球探测器轨道确定精度的要求,选取不同星历表对轨道精度的影响有限。
3.2 动力学模型改进
在地月空间,探测器的动力学方程在月球质心坐标系下可描述为

式(1)中,r为卫星的位置矢量;ae为地球产生的质点引力加速度;as为太阳产生的质点引力加速度;am为月球产生的质点引力加速度;alns为由月球引力位的非球形部分产生的非球形引力加速度;aens为由地球引力位的非球形部分产生的非球形引力加速度;asrp为由太阳辐射压产生的加速度;还有其它的加速度如由木星、土星等大行星引起的加速度、由天体潮汐引起的加速度等,这里统称为aoth,awol为模拟卫星因喷气产生的作用力,也称为经验力[29]。
正常情况这些作用力可分为保守力与耗散力两种,保守力包含太阳、月球、地球质心引力摄动,地球及月球的非球形引力摄动和其它大行星的引力摄动,耗散力则主要包含光压摄动、大气阻力摄动等。在保守力中,月球非球形引力摄动对绕月探测器影响较大,月球重力场模型也是轨道确定领域研究的重点,对于耗散力,太阳光压模型的不确定性也会对轨道确定结果产生较大影响,对于太阳光压模型的精细化建模也是提升轨道确定精度的有效途径。
3.2.1 月球重力场模型
月球重力场的研究一直是月球探测关键问题之一,高精度的月球重力场模型对于月球探测,特别是低轨月球探测器的轨道支持非常重要。目前,使用较为广泛的月球重力场模型有LP150Q、LP165P、SGM150和GRAIL月球重力场420阶模型GL0420A。
在“嫦娥2号”之前,探测器轨道确定中所使用的月球重力场模型为LP150Q 和LP165P,该模型是Konopliv 等[30]综合历史上的各类观测数据和LP 的多普勒及测距数据反演得到的,因其月球背面数据较少,远月面的有效阶数仅为60阶,但在实际运用中,该模型表现出了较好的轨道预报精度。
在2012 年,GRAIL 重力场发布之后,段建锋等[31]人使用历次嫦娥任务的实测数据对420 阶模型GL0420A 进行了相关的分析比对工作,发现该重力场对绕月探测器轨道确定精度的提升具有显著的贡献,特别是对于非环月极轨道,相较于LP 重力场模型,外推星历的偏差均方根可达2 km,在后续嫦娥系列任务中均采用该模型进行轨道确定。
曹建峰等[32]对SGM150 模型进行过细致的研究,发现该重力场模型在中高阶项上得到了明显改善,在远月面可以发现明显的重力异常正负交替现象,通过嫦娥任务的实测数据解算,发现基于该模型的轨道确定精度优于LP 系列模型。但是对于200 km的环月轨道,SGM 重力场模型对轨道精度提升有限,因此在“嫦娥2 号”任务中,依然采用LP165p重力场模型。
3.2.2 太阳光压模型
20 个世纪60 年代初,人们就开始针对太阳光压对人造卫星轨道的影响展开了相应的研究。特别是在早期卫星导航系统的发展带领下,太阳光压对探测器轨道的影响越来越重要,研究也逐步的加深。由于探测器受太阳光压的大小不仅与其面质比、表面材料有关,还与卫星运行姿态、地影效应、太阳活动等因素有关。这涉及到探测器的物理特性和其所处的空间环境,一直以来都是最难以建模描述的摄动力之一,也是在探测器精密定轨过程中亟需解决的技术难题。
在月球探测任务中,应用较为广泛的太阳光压模型是分析型太阳光压模型,该模型主要依据探测器的质量、几何形状、材料光学特性等物理特性而建立的,最早提出的是球模型,因其具有物理背景较为清晰,模型输入参数可在任务前期确定且可以保证一定的轨道确定精度等特点,所以在深空探测工程任务中具有广泛的通用性。我国月球探测器绝大部分都是轴对称的箱翼结构,且在地月/月地转移、绕月轨道上大部分时间处于三轴稳定姿态,因此,可较为准确的估计出探测器的太阳光压等效面积,进一步精细化模型的方向大多集中在解决相互遮挡及通过有限元的思想精细化求解面积上[33]。但如遇到“嫦娥4号”中继星等具有特殊构造的探测器,则需要重新构建相关模型,段建锋等[34]针对此问题,基于中继星的实时姿态数据,构建了一种多特征面的太阳光压模型,有效地解决了该问题,并提升了轨道确定精度。
3.2.3 姿控喷气模型
在月球探测任务中,除了太阳光压之外,对探测器轨道确定精度影响较大的就是因其本身姿态控制所产生的力。在“嫦娥1号”“嫦娥2号”任务中,探测器使用的是动量轮饱和卸载的方式进行姿态控制,且卸载较为频繁,在无较为有效模型的前提下,段建锋等[35]采用优化定轨策略的方法,提升绕月轨道的重叠弧段精度,可以将重叠弧段沿迹方向精度提升至百米量级。“嫦娥3 号”任务之后,探测器使用力耦喷气的姿态控制模式,但是因其力耦本身具有一定的误差,无法在喷气时完全保持力的平衡,因此,依然会带来额外连续的影响力,针对此问题,张宇等[36]建立了连续姿控的轨道动力学模型,在轨道确定中消除该影响,根据实测数据验证,环月段的定轨精度由百米量级提升至十米量级。
4 轨道确定精度
中国的月球探测已经完成了5 次任务6 次发射,积累了大量的实测数据,在测控系统性能不断提升及相关模型不断优化的前提下,月球探测器的轨道确定精度也在不断提高。
目前常用的100 km×100 km 圆轨道及100 km×15 km 椭圆轨道环月探测器,基于我国测控网(Chi‐nese Deep Space Network,CDSN)的测控支持下,定轨位置精度优于百米量级,地月/月地转移段内的定轨位置可实现优于500 m 的精度[37-39],对于“嫦娥3 号”在月球虹湾地区的月面定位,实现了优于100 m的定位精度[40-41],对于我国首颗地月L2点探测器“嫦娥4号”中继星,其在Halo轨道处于对日定向时的定轨位置精度可实现优于km级的精度,相关定轨精度均已达到国际先进水平。
5 总结与展望
我国月球探测任务已经发展了10 余年,牵引了相关技术的飞速发展,对于在航天飞行试验任务中可决定任务成败的轨道确定技术也不例外。本文从测控系统与轨道确定技术发展两方面,对轨道确定领域相关技术的发展过程进行了回顾总结。在深空测控体系与测量技术不断发展的同时,相关研究人员从时空参考框架、动力学模型着手,不断改进相关模型及优化相关参数,在历次嫦娥任务中,解决工程实际问题的同时,轨道确定精度也在不断提升,为任务的成功保驾护航。
我国下一阶段的探月目标是“嫦娥5号”采样返回任务及后续的载人登月任务,这些任务的难度将进一步增加,特别是月球附近的交会对接任务,对于轨道确定精度的要求更高。因此,这也要求目前的深空测控体系不断升级优化,相关的轨道动力学基础性研究工作也需要持续开展,特别是EOP 参数优化、太阳光压精细建模、姿控喷气建模等方面,进一步促进轨道确定精度的提升。
猜你喜欢
学与玩(2022年6期)2022-10-28
中国船检(2020年11期)2020-11-27
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年2期)2014-07-12
太空探索(2014年1期)2014-07-10