
光栅精密位移测量技术发展综述
2019-09-02 07:46李舒航马庆林
中国光学 2019年4期
高 旭,李舒航,马庆林,陈 伟
(1.长春理工大学 光电工程学院,吉林 长春 130022;2.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
精密位移测量是半导体、精密测量和计量领域的关键问题。在现代制造系统和测量仪器中,精密测量的水平决定了制造仪器的精度,因此高精度位移测量系统对于现代设备制造具有重要意义。
光栅位移测量起源于20世纪50年代,1954年,英国建立了第一个利用莫尔条纹测量线位移的工作样机,随后各国家开始进行不断的研究,基于干涉和衍射的测量系统开始逐渐发展起来。(1)德国海德汉公司从60年代初期开始生产直线光栅尺,1987年推出LIP101敞开式光栅尺,分辨率为0.02 μm。该公司今仍是市场认可度最高的光栅尺及编码器厂家,生产的LC193F直线光栅尺分辨率达0.005 μm;(2)日本佳能公司从1990年开始大量申请衍射光干涉方面的专利,不断发展位置传感器,ML-08/1000GA线性传感器在10 mm范围内线性精度达到±0.08 μm;(3)中国科学院长春光学精密机械与物理研究所(简称长光所)1959年自主研制出了我国第一台光栅刻划机和第一块光栅。2016年,长光所制造出目前世界上面积最大的高精度中阶梯光栅。光栅测长技术至今已有几十年的历史,德国、日本等国家的技术领先的公司占据了绝大部分的高端领域,中国的精密测量技术虽目前尚不属于领先行列但也在不断发展中。总体来讲,光栅测量技术正朝着高分辨率的方向发展。随着德国“工业4.0”与“中国制造2025”的提出,人们对于精度的追求越来越高,没有高精度的测量就没有高精度的仪器,精密测量精度已经进入到纳米量级[1-3]。相较于电容、电感微位移测量、激光位移测量等系统,基于光栅的位移测量系统由于具有精度高、分辨力高、体积小、抗干扰性强、成本低、工作环境要求低、使用方便等优点,具有更大的应用潜力,目前已经发展出很多新的基于光栅的位移测量系统[4-9]。
本文对光栅精密位移测量系统的原理进行了介绍,分析了目前精密位移测量系统的基本原理、发展现状及优缺点,并提出了光栅精密位移测量系统的未来发展趋势。
2 基本原理
光栅位移测量系统包括光学测量系统、信号接收处理、电子学细分及整体装调部分。整体首先由光源产生光束照射到测量光栅上,光栅固定在线性移动部件上做直线运动,光束经过移动的光栅时由于产生衍射光干涉而携带位移信息,后经光信号接收及转换系统,将光信号转化为电信号,再经过电子学细分等处理过程得到精密位移量。本文着重阐述光学测量部分,其主要依据以下原理设计:(1)衍射光栅干涉原理:双光栅测量系统中参考光栅和测量光栅成一定夹角放置,相对移动时出射的各级衍射光光程产生变化,从而发生衍射光的干涉,通过对干涉信息的解调获取位移信息。(2)多普勒频移原理:当单色波入射到运动物体时,光波发生散射,散射光频率相对于入射光频率产生了正比于物体运动速度的频率偏移。当运动物体为光栅时,出射的同一正负级次衍射光产生频移,合束后产生拍频干涉,后经对干涉信息的接收与解调得到位移信息。随着光栅测量技术的发展,一方面现已发展出更多的新型光栅,他们不再以传统的原理进行测量,而是结合新材料设计新光路;另一方面随着探测器的发展,光栅信号处理方式也在不断更新,共同实现了位移的精密测量。
3 光栅位移测量关键技术分析
现代工业追求的高精度、高分辨力、多维度、抗干扰性强的测量目标催生了新型光栅精密位移测量系统。以下主要介绍在传统测量光路的基础上,通过改良光路结构、设计新型光栅、运用差分原理等实现高精度、多维度的新型光栅位移测量系统,并给出各系统的优缺点。
3.1 基于光栅的一维测量系统
基于光栅的一维测量系统可分为单光栅、双光栅与多光栅系统,它们大多以衍射光干涉为测量原理,设计光路达到测量目的。
3.1.1 双光栅光学系统
传统双光栅测量系统由参考光栅和测量光栅组成,两光栅相对移动产生莫尔条纹,后经探测器将光信号转化为电信号,经电学倍频处理得到精密位移信息。经典双光栅位移测量系统原理如图1所示[10],光源S发光经过准直透镜L后照射到参考光栅G1上,经过参考光栅G1和测量光栅G2后形成莫尔条纹,由探测器D接收后传输到信号处理系统E。当测量光栅相对参考光栅移动时,通过检测莫尔条纹的变化,可得到两光栅相对位移的大小,实现微小位移测量。
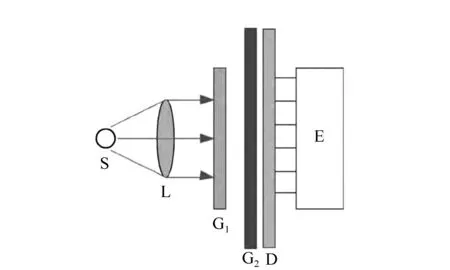
图1 经典双光栅位移测量系统光学结构 Fig.1 Optical structure of classical double grating displacement measurement system
3.1.2 单光栅光学系统
传统双光栅系统当光栅截距小于10 μm时,信号信噪比降低,且由于高密度光栅的衍射效应使高次谐波增加,严重影响后续的电信号处理。因此提出基于光栅衍射光干涉的单光栅位移测量系统[11-12],如图2所示。光栅尺安装在直线导轨上,读数头相对其做直线运动,激光经分束镜后垂直射向光栅产生衍射光束,±m级衍射光通过自准直反射器后再以一定角度射入光栅,再次通过光栅的衍射光通过分束反射镜后进入NBS和PBS的偏振分光系统,后经接收器接收并转化成光电信号。单光栅测量系统若采用400 lp/mm的高密度光栅,则原始信号周期为0.6 μm,经电子学细分后系统分辨率达到0.586 nm,精度为0.1 μm。
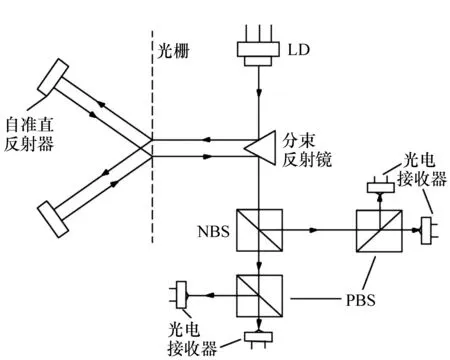
图2 单光栅位移测量系统光学结构 Fig.2 Optical structure of single grating displacement measurement system
3.1.3 三光栅光学系统
光栅测量系统中,提高系统测量精度和分辨力的根本方法是采用高密度的光栅优化原始光信号,因此在双光栅系统中考虑通过减小光栅副的间隙得到可用的光电信号,但过小的间隙导致的蹿动或灰尘极易划伤光栅,且增加了对导轨加工精度的要求。在单、双光栅系统中,仅通过提高光栅的刻线密度无法实现更高精度的测量。因此,为得到高精度的位移测量系统,需要突破传统的双光栅结构,需设计新型光学测量结构。
中国台湾元智大学和哈尔滨工业大学联合提出采用三光栅组合干涉仪实现高位移分辨率的编码器。三光栅组合在测量位相2π内位移误差在10 nm以内,理论预测的最佳灵敏度为0.72°/nm,分辨率近似小于0.1 nm,对环境有较强的抗干扰性。其原理如图3所示[13-15],外差光源发出激光进入三光栅系统,经过光栅G1产生的±1级衍射光分别经反射镜M1、M2后通过1/4波片进入探测器D1、D2。探测器D1中的干涉信号是由+1级衍射光的P偏振态与-1级衍射光的S偏振态相干形成,通过琼斯矩阵的计算可得经光栅后的四路光电流信号公式:

(1)

(2)
I3≈2{1+cos[ωt-(-φG3+2φG1-φG2)]} ,
(3)
I4≈2{1+cos[ωt+(-φG3+2φG1-φG2)]} ,
(4)
其中:ω为外差光源的角频差;φGi(i=1,2,3)为相移量,栅距为dgi(i=1,2,3),位移量为di,则φGi可表示为式(5)
(5)
其中,i=1,2,3;m=1,2。
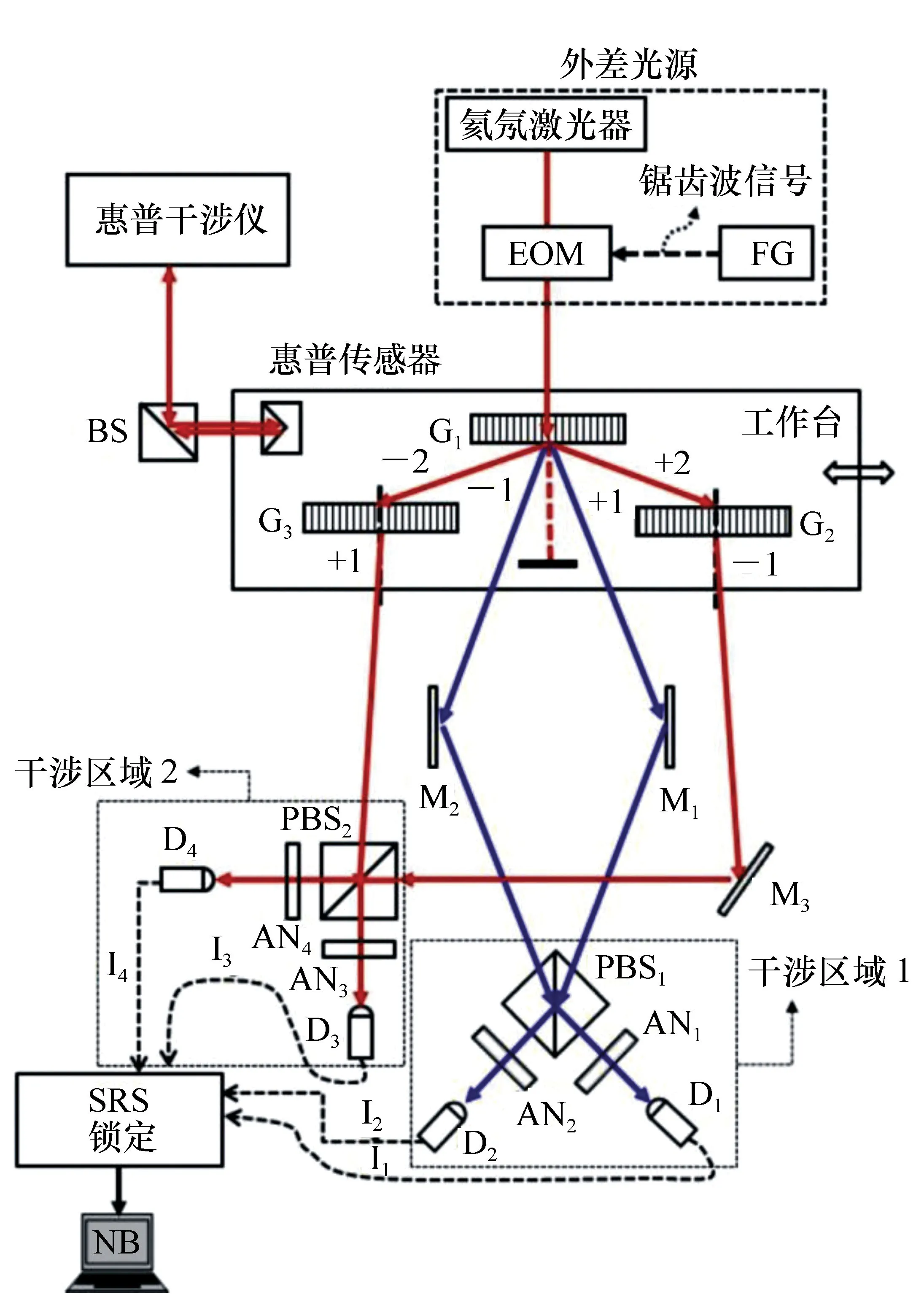
图3 三光栅位移测量原理图 Fig.3 Schematic diagram of three-grating displacement measurement
则位移量di(i=1,2)可表示为式(6)、(7):
(6)
(7)
其中:dEGP为有效光栅间距。
3.2 基于光栅的二维位移测量
测量的更高要求为在传统一维测量的基础上能够测量二维至多维的位移量,且需实现多轴向测量[16]。当前大多采用叠加多个激光干涉仪的方式,但常用的激光干涉仪由于其干涉光路较长、测量精度受环境影响大等原因,使得叠加后的系统体积较大、对准精度要求高。因此,二维信息的测量正向着将二维光栅应用于测量系统中并设计开发新的编码算法的方向发展[17-20]。
3.2.1 二维光栅光学系统
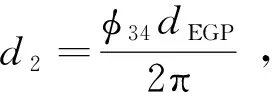
哈尔滨工业大学超精密光电仪器工程研究所提出基于两个平行光栅的二维位移测量系统,实现了光栅位移测量的二维应用。采用二维反射型矩形光栅作为测量元件,测量光栅设计为包含二维光栅和两个一维光栅的复合透射矩形光栅。平行激光束发出波长λ的激光垂直入射到二维反射式光栅上,然后利用扫描光栅和标度光栅的衍射效应产生多阶衍射光束,如图4所示。这些衍射光束通过测量光栅后,x轴探测单元产生了与x轴位移相关的4条干涉带,同时又产生了与y轴位移相关的4条干涉带,并由该干涉仪进行检测。根据标量衍射理论,可以得到衍射光束的相对相移[21-22]。经实验验证此二维光栅能够测量二维位移,稳定性与精度还需进一步验证。
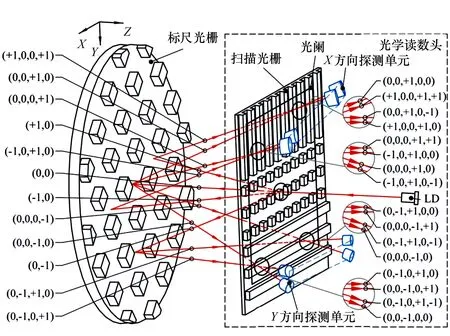
图4 二维平面光栅编码器基本结构 Fig.4 Basic structure of two dimension planar grating encoder
3.2.2 二维光栅编码
上海光电所及中国科学院大学提出了一种新的二维空间编码模式——二维金矩阵法,用于一般的二维定位。为了实现二维测量,参考两个矩阵进行设计得到图5中的两个轴[23]。这两个矩阵的每一行都是伪随机数组的一个例子。矩阵A的每一行都和m序列相同,它指的是x轴,矩阵B的行是另一个m序列,第二行是循环移位的结果,从第一行开始,矩阵B的其余行遵循下一行的规则从前一个循环移位,然后矩阵B指向y轴。结果(矩阵C)在矩阵A和B之间进行异或运算。有这样性质的子矩阵是独一无二的,因此,就像伪随机数组的一维测量一样,来进行二维测量。
图5 编码原理 Fig.5 Coding principle
3.3 基于光栅的三维位移测量
三维测量原理多从空间光路设计的角度出发,在空间放置两个至多个一维或二维光栅,利用偏振分光棱镜将携带位移信息的光束进行汇合,形成干涉,后经解算得到位移信息。此外,近几年部分学者从图像处理的角度基于二维图像处理,对三维位移量进行检测[24-25]。
3.3.1 基于二维光栅的三维测量系统
上海交通大学研究人员提出的基于正交衍射光栅的三维纳米位移传感器[26]实现了对xyz三方向的位移测量,光路示意图如图6所示。
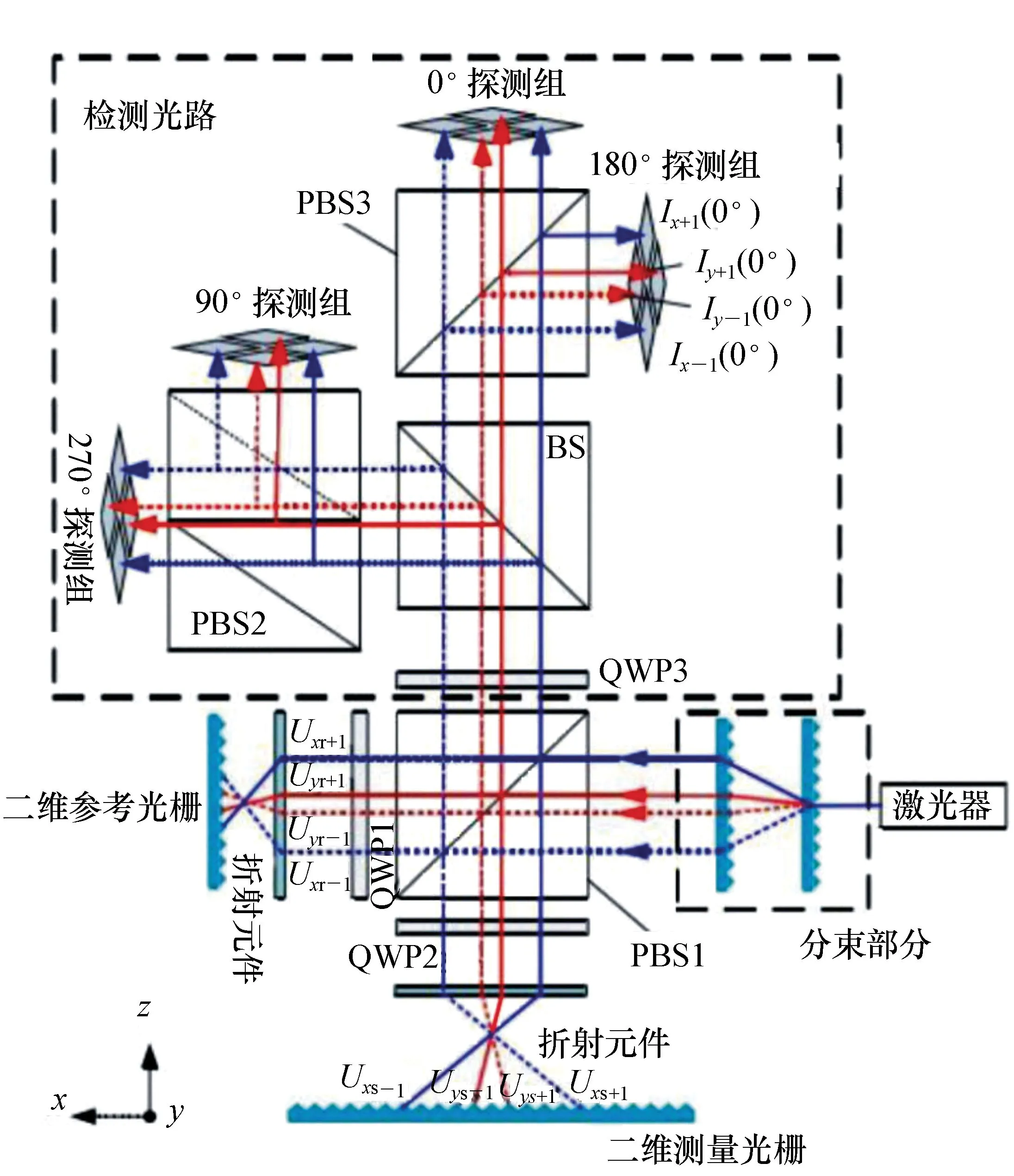
图6 三维位移测量光路图 Fig.6 Light path of three dimension displacement measurement
在该系统中,构造了两个相同的二维正交衍射光栅,分别作为二维测量光栅和二维参考光栅。光栅在X方向和Y方向的光栅间距为0.5 μm。激光器发射的激光被分成四束,偏振光显微镜(PBS1)获得两束光,透射部分为参考p偏振光,反射部分为测量s偏振光,通过入射角相同的参考光栅分别引入4束参考光,分别在参考光衍射后返回一阶衍射光路,光栅衍射的一阶光会由原路径返回。参考光路和实测光路的四束光在偏振分光器(PBS1)处重新汇合。此时,参考光束通过1/4波片(QWP1)两次,从p光变为s光,当参考光路的光束再次通过偏振光显微镜(PBS1)时,它被反射,同样,被测光束通过1/4波片(QWP2)两次,其极化方向由s光变为p光。此时,通过偏振光显微镜(PBS1)将光路的光束传输到四通道检测光路,得到了两个具有位移信息的光信号,它们的极化方向相互垂直。通过1/4波片(QWP2)后旋转两个光信号的偏振方向,通过分光镜(BS)、PBS2和PBS3后,当极化方向相同时,它们最终可以相互干涉,在光电探测器中得到了两个90度相位差的正弦信号。当测量光栅的位置发生变化时,探测器表面的干涉条纹会发生周期性的明暗变化,通过检测干涉条纹的变化可以计算出位移信息。经电子学细分后,理论上系统分辨率可以达到0.486 8 nm,但受到光栅条纹信号的限制,无法达到此精度,还需要具体分析。
3.3.2 基于数字图像处理的三维位移测量
山东师范大学光学与光子器件重点实验室孙平等人提出基于数字图像相关(DIC)和光流(OF)相结合的三维位移同步测量技术,从两幅连续干涉图中即可准确地提取出平面内位移和平面外位移。利用DIC确定连续两帧图像之间的平面内位移后,通过速度场和原始图像的局部频率估计,由开窗傅立叶变换算法计算得到平面外的全场位移图。通过图7所示装置,使用压电换能器(PZT)移动一个圆柱体引入变形,通过对变形前后的两图像进行处理获得了三维位移信息[27]。实验结果显示在局部频率大于0.35的区域误差小于5%。
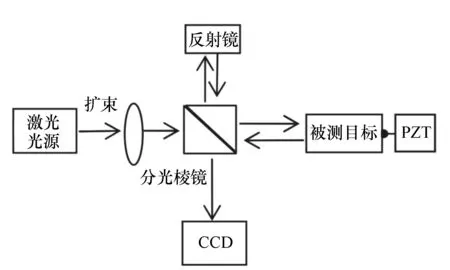
图7 三维测量实验装置 Fig.7 Experimental device of three dimension measuring
3.4 外差式光栅位移测量系统
光栅多维测量系统仍未大量投入工业使用,多处于测试阶段,对于目前大规模工业应用的位移测量系统而言,提高其测量精度与鲁棒性是当务之急,因此考虑运用外差干涉测量方法。该方法由两束频率不同或者波长不同的光束进行叠加,其形成的干涉信号为随着时间、相位变化的拍,拍频信号的相位中携带位移信息,经相位解调技术可获得精准的位移信息。外差干涉测量方法不受光强变化的影响,对于杂讯信号具有良好的抑制能力和抗干扰能力。
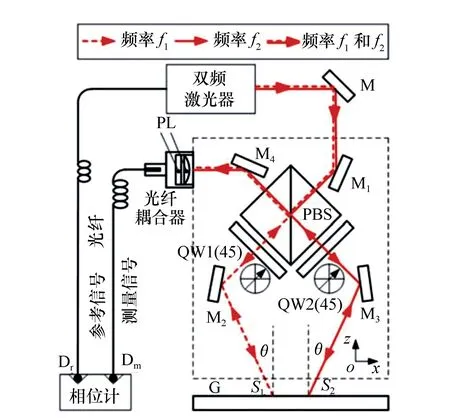
图8 外差利特罗式光栅干涉仪位移测量系统原理 Fig.8 Principle of displacement measurement system for heterodyne Littrow interferometer
清华大学机械工程系摩擦学国家重点实验室提出超精密外差利特罗式光栅干涉位移测量系统。双频激光器产生外差光源,利用差频激光作为测量光束,从而提高系统的抗干扰能力,制造了尺寸仅为48 mm×48 mm×18 mm的光栅干涉仪,在宽松环境下,死程误差仅为±0.05 nm,系统分辨率达0.41 nm,其测量原理如图8所示。双频激光器出射正交偏振光至光栅干涉仪中,双频正交偏振光经PBS后,p偏振光透射,s偏振光反射,p偏振光经过1/4波片后变为左旋偏振光,经过M2后以利特罗角入射至光栅发生衍射,负一级衍射光原路返回至PBS后发生反射,再经M4进入光纤耦合器;同理s偏振光的正一级衍射光原路返回后经1/4波片、PBS、M4后进入光纤耦合器。两束光以重合入射的方式射入光纤耦合器,形成光学拍频测量信号,经光纤传输至相位计。当光栅沿光矢量方向运动时,外差相位计利用参考信号读出光栅运动位移信息[28-29]。此外,中国台湾原泽大学等几所高校同样将外差原理应用于测量光路中来提高测量精度[30-32]。
3.5 时间光栅位移测量系统
随着对高密度刻划要求的提高,传统光栅刻划的均匀性难以保证,所以急需开发一种制作简单、刻划均匀、抗干扰性强的光栅。2000年,重庆大学机械传动国家重点实验室的彭东林教授首次提出“时栅”的概念,运用时间测量空间[33-35]。时栅位移测量方法是在传感器内部建立“匀速”运动的参考系,将空间位移差转换为运动系时间差后进行测量,原理如图9所示。其中静止的参考点b和以速度v运动的参考点a位于同一圆周上,当旋转运动的坐标系S′沿圆周以速度v1匀速转动,记S′上某一点顺序扫过点a、b时,记对应瞬时时刻分别为Tai和Tbi。通过测量瞬时时刻Tai和Tbi之间的时间差即可计算出测量点a与参考点b之间沿圆周的位移量x,如式(8):
x=v1(Tbi-Tai)=v1ΔTi,
(8)
式中,ΔTi为S′第i次扫描到参考点b和被测点a的时间差,i=1,2,3....
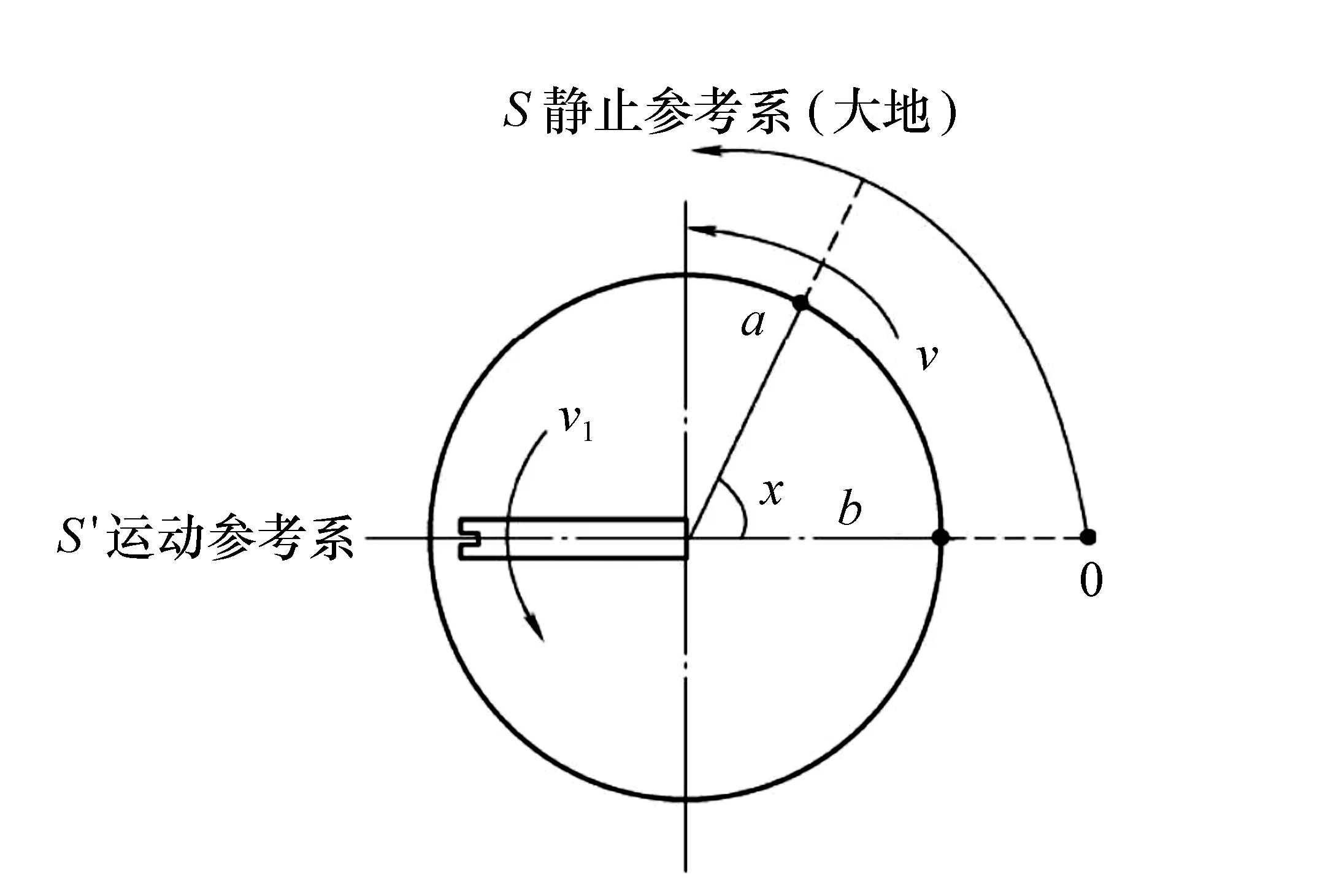
图9 时栅位移测量原理 Fig.9 Principle of time grating displacement measurement
实际上,通过构建一个匀速运动参考系对参考点b与被测点a进行扫描,得到两者时间差ΔTi,便可换算得到相应的位移x。而时间差可以用高频时钟脉冲计数来实现,即可将高频时钟脉冲序列看做是一个“时间栅”。2004年,由国家法定计量检定机构——中国测试技术研究院为圆、直线时栅出具的检定报告显示,精度分别为±0.8″、±0.5 μm;分辨力分别为0.1″、0.1 μm,目前圆时栅实际稳定度达到±0.5″的精度水平。
他们由此提出一种用于远距离、纳米级精度测量的时间光栅传感器[36-38]。该传感器的工作原理如图10所示,由图10可知,其是采用高频时钟脉冲作为测量标准,通过相对移动的位移与固定尺、移动尺之间的电容变化成正比的关系,计算电容值的变化,推算出位移变化量,经试验测试分析,其精度可达±200 nm。
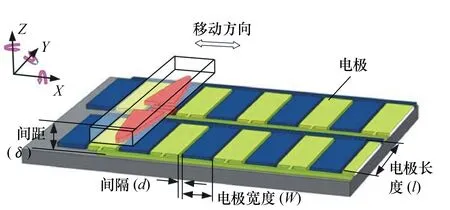
图10 时间光栅传感器原理图 Fig.10 Time grating sensor schematic
3.6 光纤光栅(FBG)位移传感器
传统刻划式光栅以其高精度、高分辨力以及多年发展成熟的制作技术优势已经广泛应用于工业测量,然而,在极端条件下,光栅由于自身材料性质的限制,易受腐蚀和温度等影响。1978年,K.O.Hill等人首次观察到掺锗光纤中因光诱导产生光栅的效应。他们用488 nm氩离子激光在光纤中产生驻波干涉条纹,导致纤芯折射率沿轴向形成周期性微扰,制成了世界上第一只被称之为“Hill光栅”的光纤光栅。由于其融合了光纤重量轻、体积小、抗腐蚀等特性,可使位移传感器微型化、轻量化,因此对其的应用研究迅速发展起来[39-41]。光纤光栅由于体积小、精度高、抗电磁干扰,且可远距离传输信号,近年来被广泛用于位移传感器,光纤光栅(FBG)传感器的测量原理如图11所示。当一定带宽的激光穿过光栅时,有一部分窄带宽的光被返回,返回的一定波长的光波作为反射信号,称为布拉格波长。
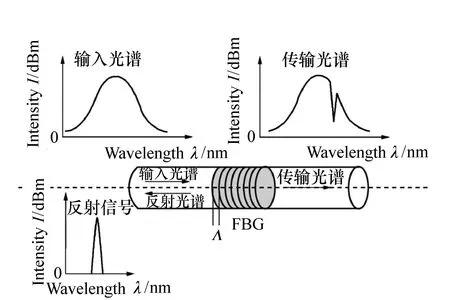
图11 光纤光栅原理图 Fig.11 Schematic diagram of fiber grating
λB=2neffΛ,
(9)
式中,λB为布拉格波长,neff为核心层的反射系数,Λ为布拉格光栅的模量系数。
材料参数neff和Λ会随着温度和应变的改变而发生相应变化。
新加坡大学美国生物医学工程学院提出一种新型具有亚微米分辨率的光纤布拉格光栅位移传感器。该传感器主要由高度悬置的光纤、T型悬臂梁、楔形滑块和恢复弹簧组成,如图12所示。利用预拉伸力悬置光纤,将光纤两端粘在传感器框架上,T型悬臂梁尖端的顶面与悬臂光纤的中点接触,尖端连接并沿楔形滑块移动。交互式探头接收位移输入,并与T型悬臂梁形成转换机构,使水平位移转化为施加在纤维中点上的垂直运动,位移可由相应的光纤光栅中心波长偏移和转换机构的结构参数来确定[12,42-43]。当温度恒定时,FBG反射中心波长偏移与应变变化的关系可表示为(10)、(11):
(10)
(11)
式中,Δλ0表示光纤光栅中心波长变化,λ是最初的光纤光栅反射中心波长,ρe代表光学应变系数,Δε是光纤对于其初始状态的应变增量,t是接触宽度,y是垂直方向位移量。经试验测试分析知该系统在1.0~2.0 mm内具有0.48 μm的高分辨率和2 086.27 pm/mm的高灵敏度。
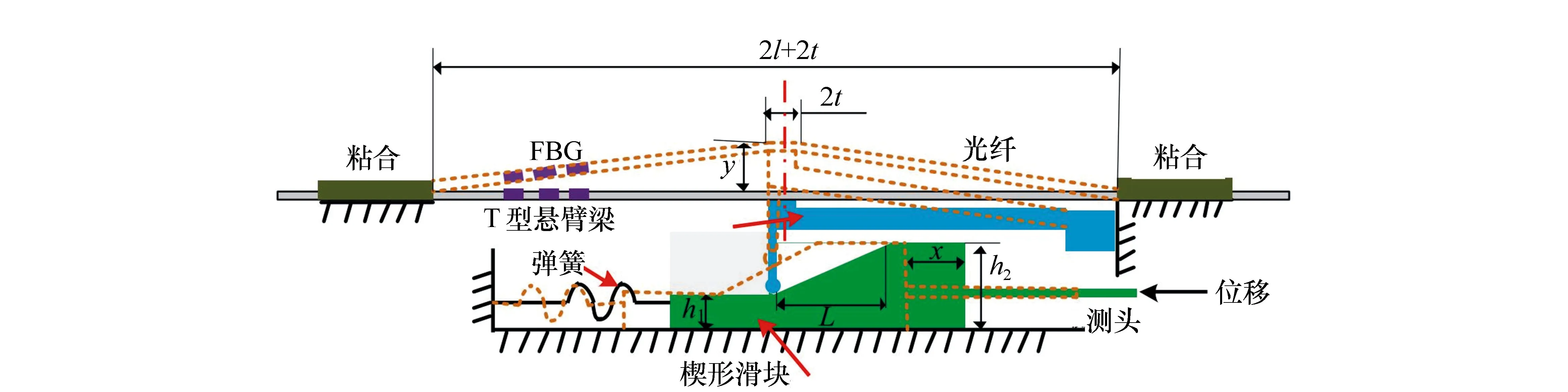
图12 光纤布拉格位移传感器 Fig.12 Fiber Bragg displacement sensor
综上所述,基于光栅的位移测量技术已经从传统的透射型双栅线位移形式发展到平面位移、三维位移形式,同时衍生出了多种以光栅衍射为基础的高精度位移测量系统,本文将几种有代表性的光栅测量系统的优缺点列于表1所示。
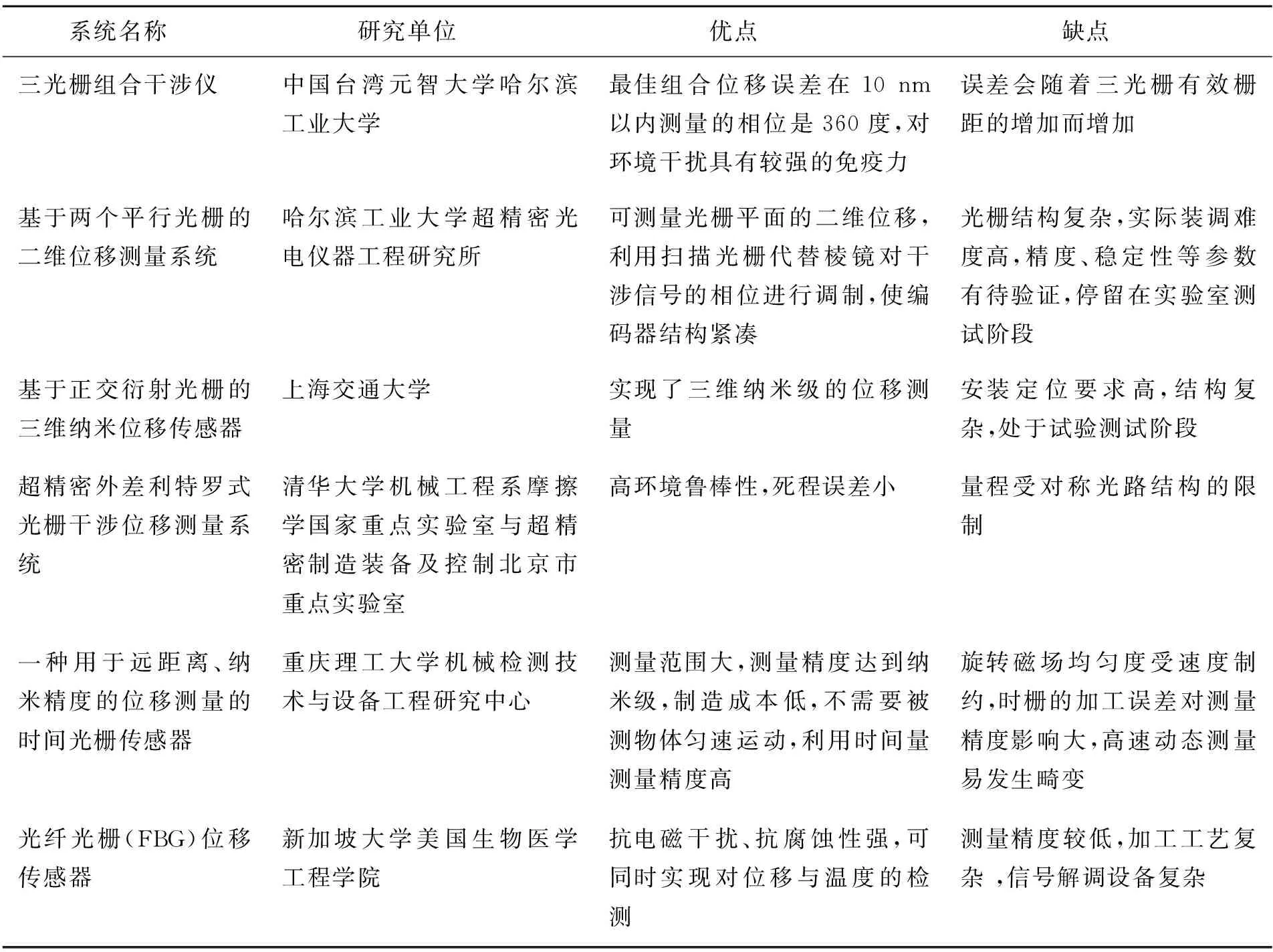
表1 基于光栅的位移测量系统优缺点对照表Tab.1 The advantages and disadvantages of grating-based precision displacement measurement
4 光栅位移测量技术发展趋势
目前光栅位移测量技术具有以下特点:(1)光栅制作刻线长度有限,限制了光栅测量系统的检测范围;(2)高密度光栅刻线困难,工艺复杂,制作环境要求高;(3)光栅位移测量系统多为对称光路,测量元件间的位置误差对测量精度影响严重;(4)由于刻线密度的限制,仅通过提高刻线密度来提高测量精度难以实现;(5)基于光栅的一维位移测量发展成熟,多维测量仍在研究测试中。
综上所述,在未来发展中,光栅位移测量技术需要在以下几个方面展开研究:
(1)提高光栅制作技术。针对光栅刻线环境条件要求高,高刻线密度光栅制作困难的现状,光栅制作应开发新的技术,以制作高刻线数、大量程的衍射光栅。
(2)设计新的测量系统。现有成熟的光栅位移测量系统多应用对称式光路,光路位置误差对测量结果影响严重,为此应研究新的测量原理,结合其他光学元件,设计简洁实用的测量光路。
(3)融合多元件特性,开发新型光栅元件。光栅测量不仅局限于传统光栅元件,开发结合其他元件,制作新型光栅,发挥各自的优越性也是光栅位移测量技术的发展方向之一。
(4)发展多维测量技术。现有光栅线位移测量技术发展成熟,在工业等领域大规模使用,但多维测量多处在测试分析阶段,需要在保证精度及分辨力的情况下,实现动态条件下的多维位移测量。
(5)误差理论分析。结合光栅制作误差、系统装调误差、环境误差、电子细分误差等,分析整体误差的产生与消除,在量化的分析上研究补偿技术。
(6)设计新的编码算法。结合多维光栅的结构,设计新的简单有效的编码算法用于多维位移测量光路中,通过算法的应用来降低维度、减小误差,简化测量光路的结构。
5 结束语
光栅位移测量技术研究在工程应用中具有重要意义,特别是在精密位移测量方面。本文在阅读了大量基于光栅的位移测量文献后,对比了现有典型的光栅位移测量系统。成熟的测量技术已经可以达到纳米级测量,多维光栅测量技术虽然已经提出,但技术尚不成熟,未大规模投入工业使用,且光栅位移测量技术仍受刻线精度和测量方法的限制。因此,高精度、高分辨力、高鲁棒性、结构简单、微型化、多维化、多技术融合将是未来发展方向。经过多年的发展,基于光栅的位移测量系统已经取得了大量的成果,随着科学技术的迅速发展,光栅测量技术将更加完善。
猜你喜欢
家庭影院技术(2020年1期)2020-06-24
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
制造技术与机床(2019年7期)2019-07-22
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
家庭影院技术(2019年4期)2019-04-17
电子制作(2019年24期)2019-02-23
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15
军事文摘·科学少年(2017年2期)2017-04-26
北方交通(2016年12期)2017-01-15
