基于HIL的车辆道路偏离预警系统测试及评价方法
2019-09-02 05:52:48高艳高奥齐国巍张东波赵德银张博王洪雨景海娇张家旭
汽车文摘 2019年9期
高艳 高奥 齐国巍 张东波 赵德银 张博 王洪雨 景海娇 张家旭
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词:车辆道路偏离预警系统 HIL 大数据分析 正态分布 安全
缩略语
LDW Lane Departure Warning(车道偏离预警)
HIL Hardware In Loop(硬件在环)
ADAS Advanced Driver Assistance System(先进驾驶辅助系统)
1 前言
随着汽车保有量的不断增加,道路上的汽车越来越多,汽车在给人们带来交通便利的同时,造成的交通事故也相应的增加了,而相当一部分交通事故是由于驾驶员注意力不集中导致车辆无意识偏离车道造成的[1],由此看来车辆道路偏离预警系统(LDW)就非常有必要了。车辆道路偏离预警系统是通过摄像头时刻采集行驶车道的车道线,通过图像处理获得汽车在当前车道中的位置参数,当检测到汽车将要偏离车道时,传感器会及时收集车辆数据和驾驶员的操作状态,之后由控制器发出警报信号,提醒驾驶员车辆将要偏离车道的系统[2]。
随着智能驾驶辅助系统的不断发展,LDW已经成为大部分汽车的标配系统。LDW系统的功能及性能的好坏直接影响整车的安全性。目前各大主机厂对于ADAS测试主要分为实车测试和虚拟仿真测试,采用实车测试危险性较大,复杂场景难以模拟,可重复性差,而虚拟仿真测试方法是一种能够满足上述需求的高效、实时、精准的测试验证方法。而目前行业内对于LDW报警点的测试评价准则还是处于缺少状态[3]。
随着大数据时代的到来,大数据在科学研究中起着越来越重要的作用,通过对大数据的收集、处理可以形成有力的评价依据。本文基于HIL虚拟仿真测试技术,通过不同的仿真场景,获得大量的试验数据,采用大数据处理的方法对LDW的功能及性能测试数据进行处理和研究,形成一套独有的测试评价准则,在保证LDW系统安全、可靠的同时,也为驾驶辅助系统的评判提供了一种有效的方法[4]。本文从测试环境的建立到测试方法的执行最终提出一种基于“3σ”原则来评价车辆道路偏离系统的性能指标。
2LDW测试环境
LDW系统主要是通过摄像头采集视频图像信息确定车辆位置,判断车辆是否发生偏移的,从而对驾驶员发出报警信号。在测试之前,需要按照车辆外形尺寸和实车TAC标定的标靶参数,对虚拟环境中的摄像头模型和真实摄像头的位置进行标定,保证台架中摄像头控制器识别到的仿真场景与实车的摄像头识别的场景是一致的,从而保证仿真场景的正确性[5]。
LDW HIL仿真测试环境总体结构如图1所示。包括上位机系统、虚拟仿真平台和智能前视摄像头暗箱。上位机系统通过向虚拟仿真平台发送命令,控制整个系统的工作流程,它主要包括测试用例管理模块、测试序列模块、自动化测试模块及动画显示模块。虚拟仿真平台通过IO板卡和CAN板卡仿真LDW控制器工作的外围环境。智能前视摄像头暗箱包括LDW控制器装置、透镜装置、动画仿真显示屏。透镜装置等效增加屏幕和摄像头之间的距离,将屏幕尺寸和台架尺寸控制在合理范围内。动画显示模块是用来显示模型中模拟的交通场景。场景中虚拟的摄像头安装在虚拟的车辆环境中,通过标定使它的安装位置与实车摄像头的安装位置一致。动画显示模块显示的虚拟车辆环境包含道路(车道线、交通标志)、交通(行人、车辆)和环境(天气、树木、建筑),用于模拟现实场景中的车辆环境。
3LDW测试方法
上位机中,采用测试用例管理软件管理测试用例,LDW测试用例主要包括LDW基本功能测试用例、标准场景测试用例及特殊场景测试用例。LDW基本功能用例主要包括LDW工作状态转换、灵敏度测试、车道线类型测试、车道线颜色测试、车道宽度及车道线宽度测试。标准场景测试用例主要包括报警的产生测试、报警的重复性测试及虚假报警测试。特殊场景测试主要指坡路、盘山路、不同的气候环境及驾驶员干预的影响测试。
通过自动化测试程序实现测试序列的搭建以及实施,从而实现LDW系统的自动化测试。自动化测试序列是根据测试用例编写的图形化可执行文件,实现各个场景的仿真调用,自动生成测试报告。如图2所示。

图1 LDW仿真测试环境总体结构

图2LDW测试流程
LDW的测试主要关注的是报警的性能,LDW激活之后,报警的瞬间会输出报警信号,如图3所示,从而可以确定报警点距离车道线的距离或时距。而不同的车辆姿态,报警点距车道线的距离和时距有所差别,目前也没有准确的评价标准。本文在上述自动化测试报告的基础上,提取每次报警点的距离和时距,得到大量不同的报警点位置,采用大数据统计方法,将统计的数据经过MATLAB数据处理之后画出数据频率曲线,再根据高斯拟合得到正态分布的参数值,从而绘制出报警点的距离和时距正态分布曲线,进而可以提出LDW系统报警性能的判断准。

图3LDW报警信号
4 试验数据分析
本论文是利用大数据的数据分析方法,选取了三种车辆姿态的工况进行自动化测试,针对每组工况反复执行自动化测试序列,获取大量报警距离数据,将直路的所有报警点数据、弯路的所有报警点数据及连续换道的报警点数据进行了统计和分析。
4.1 单一工况报警点有效值分析
通过自动化序列获取直路工况左侧偏移报警点数据、直路工况右侧偏移报警点数据、弯路工况左侧偏移报警点数据、弯路工况右侧报警点数据、车辆连续偏移左侧报警点数据、车辆连续偏移右侧报警点数据,共6组数据,以直路工况左侧偏移报警点数据为例进行数据分析:
首先将直路工况左侧偏移数据录入MATLAB中,称为数组A,利用MATLAB长度公式可知,数组A长度为1 149,也就是说我们采集了直路工况左侧偏移报警点数据1 149个,然后建立一组一维数组B[1,1 149],用来对报警数据A计数,通过数组A和数组B可以得到这组数据的散点图,即直路工况左侧偏移报警点数据的分布曲线,如图4所示。以此类推可获得直路右侧偏移报警点数据分布曲线、弯路工况左右偏移报警点数据的分布曲线及车辆左右连续偏移的报警点数据的分布曲线。
对于同一工况的单侧报警点,可以根据均方根公式(1)获取有效值。
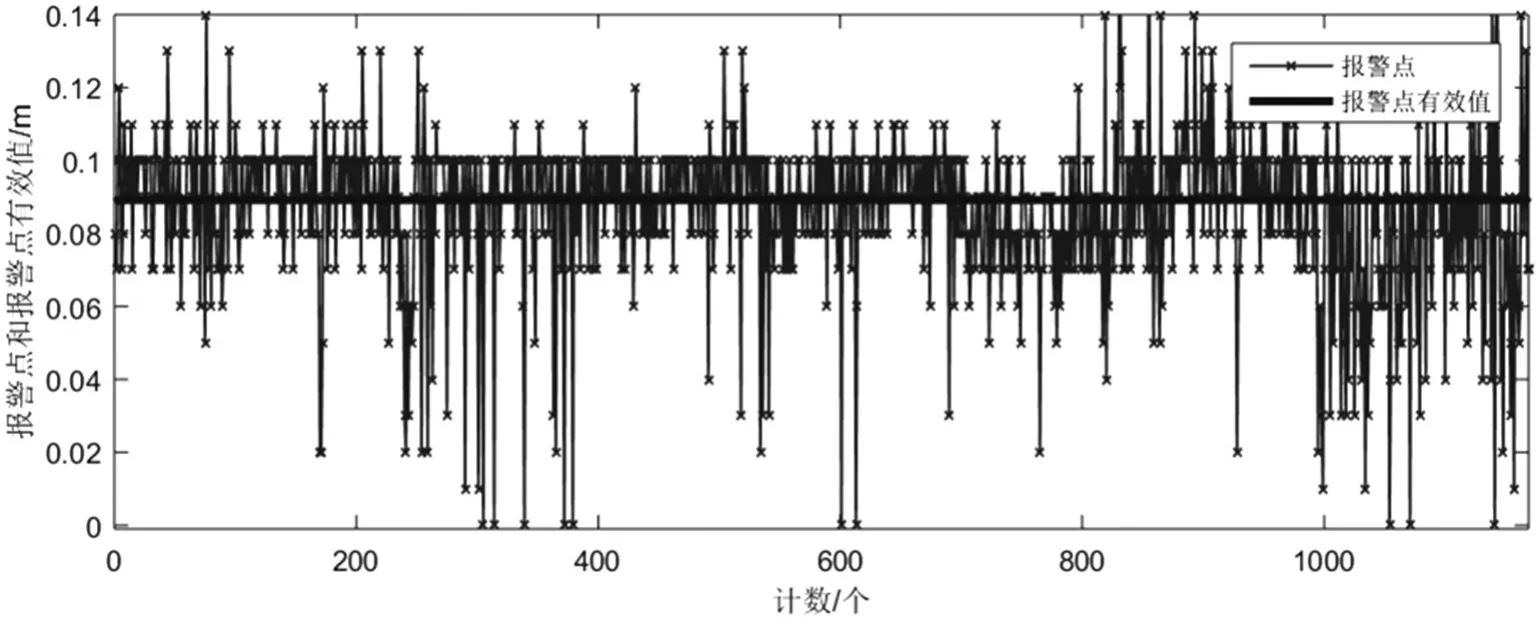
图4 直路工况左侧偏移报警点的分布曲线

式中:Xrms为数组A的有效值;N为1 149;i为(1,2,3…1 149);XN为第N个报警点位置。
把直线工况左侧偏移报警点数据代入上述公式,可以获得Xrms=0.0867 m,即直线工况左侧偏移报警点数据的有效值是0.0867 m;通过有效值可以初步评价该LDW系统报警点的典型范围。同理可以获得其他工况的报警点数据的有效值。
4.2 单一工况报警点取值范围数据分析
根据上面单一工况报警点有效值分析,可以得到直线工况左侧偏移报警点数据数组A的取值范围在0~0.14 m范围内,可以把0~0.14 m分成n份,再根据如下程序获得直线工况左侧偏移报警点数据计数统计数组num[],并绘制出直方图,如图5所示。
large=max(A);
small=min(A);
num=zeros(n+1,1);
delt=(large-small)/n;
for i=1:(n-1)
for j=1:length(A)
if(small+delt*(i-1))<=A(j)&&A(j)<(small+delt*i)
num(i)=num(i)+1;
end
end
end
再根据MATLAB软件中概率分布函数ksdensity获取图5中的报警点的频率密度曲线。从该曲线可以看出,单一工况的报警点数据处于中间位置的数据明显占所有数据的绝大多数,为了更好的分析数据的分布情况,利用MATLAB将直线工况左侧偏移报警点数据的频率曲线的横纵坐标分别取个数为100的一维数组X[0,100],Y[0,100],通过对此组数组进行一维二维各种函数的拟合,发现单一工况的报警点频率曲线与一维高斯分布Gaussian 1拟合程度很高,并可以从Gaussian 1拟合公式(2)计算出该组工况报警点数据的高斯分布方程中的参数。从而获取直路工况左侧偏移报警点的正态分布曲线及其μ和δ的值。
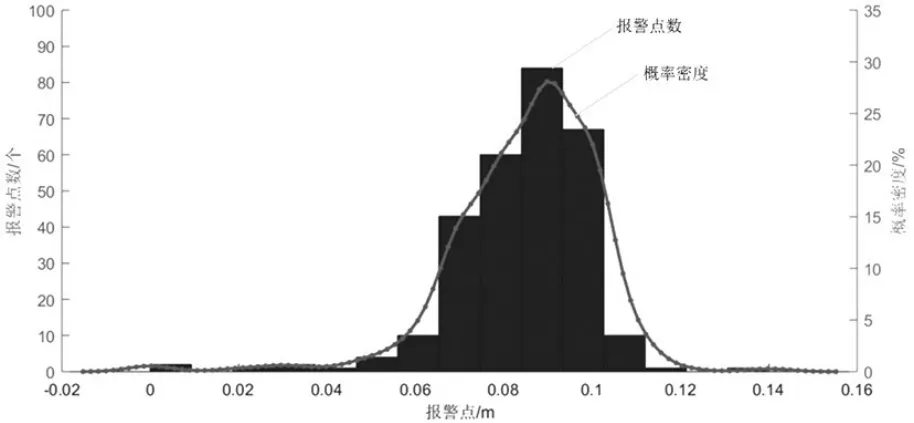
图5 直线工况左侧偏移报警点数据的报警点数量分布和频率曲线
Gaussian 1拟合公式如下:

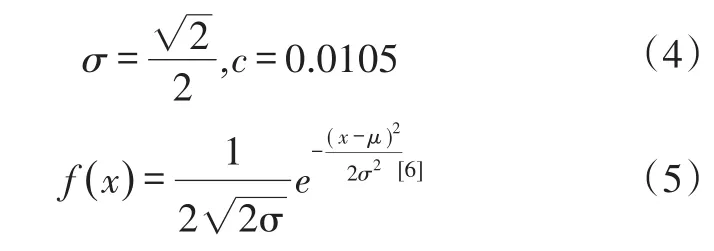
根据拟合公式和报警点数据,得出a=34.51;b=0.09424;c=0.01482。
所以拟合出的直路工况左侧报警点高斯分布公式为:

再根据正态分布曲线公式(5)计算得出期望μ=b=0.09424和标准差
利用上述方式可以对所有的六组数据分别进行统计分析和拟合,可以得到六组拟合的正态分布曲线,将左侧偏移的三组工况原始数据曲线和拟合的正态分布曲线分别绘制成如图6所示。右侧偏移的三组工况原始数据曲线和拟合的正态分布曲线分别绘制成如图7所示。

图6 左侧偏移报警点数据的频率曲

图7 右侧偏移报警点数据的频率曲线
在图6和图7中,每条正态分布曲线下横轴上一定区间的面积反映该区间的报警数据占总报警数据的比例。不同范围内正态曲线下的面积可以积分算出。再根据“小概率事件”的思想,“小概率事件”通常指发生的概率小于5%的事件,认为在一次试验中该事件是几乎不可能发生的。所以,车辆道路偏离系统的报警性能可以根据正态分布的“3σ”原则来评价。
根据图6和图7,发现不同的工况和左右偏转不同,得到的正态分布曲线有一定差异,因此得到的μ和σ也不相同,这是因为在不同工况下车辆姿态不同以及摄像头安装位置偏置造成的,因此在评价不同工况时采用不同的评价指标,这样可以更好的要求LDW系统的性能。
5 结论
本文介绍了车辆道路偏离系统的测试方法和数据分析处理的方法,采用虚拟仿真测试设备,通过自动化程序获得不同工况下的报警点距车道线的距离数据,采用大数据分析、高斯拟合、正态分布等方法进行数据分析处理,并创新性提出采用“3σ”原则来评价车辆道路偏离系统的性能指标,首次为汽车行业的车辆道路偏离系统提出了产品的性能评价方法,为后续车辆道路偏离系统的开发、验证和评价提供理论依据。
猜你喜欢
思维与智慧·上半月(2023年6期)2023-05-19 11:10:55
思维与智慧(2023年16期)2023-05-19 07:24:38
卫星应用(2021年11期)2022-01-19 05:13:02
今日农业(2021年8期)2021-11-28 05:07:50
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
诗潮(2020年10期)2020-12-06 10:44:40
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:30
环球市场信息导报(2016年41期)2017-01-19 09:26:54
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:15