C-V2X技术在智能网联汽车上的应用场景研究
2019-09-02 05:52南洋董馨陈博刘晓东
汽车文摘 2019年9期
南洋 董馨 陈博 刘晓东
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词:智能网联 汽车总线技术 自动驾驶 C-V2X
缩略语
LiDAR Light Detection And Ranging(激光雷达)
V2X Vehicle to Everything(车与万物)
V2V Vehicle to Vehicle(车与车)
V2I Vehicle to Infrastructure(车与基础设施)
V2N Vehicle to Network(车辆与外部网络)
V2P Vehicle to Pedestrian(车辆与行人)
C-V2X Cellular Vehicle-to-Everything(基于蜂窝通信的V2X)
DSRC Dedicated Short Range Communication(专用短距离通信)
WSMPWAVE Short Message Protocol(短消息协议)
3GPP 3rd Generation Partnership Project(第三代合作伙伴计划)
LTE Long Term Evolution(长期演进)
D2D Device to Device(终端直通)
EBW Emergency Brake Warning(紧急制动预警)
HV Host Vehicle(主车)
RV Remote Vehicle(远车)
ADAS Advanced Driving Assistant System(高级驾驶辅助系统)
1 前言
随着汽车智能化、网联化、电动化概念的引入,自动驾驶技术已成为推动汽车产业发展的核心竞争力之一,越来越多的汽车电子供应商推出高精度传感器、超声波雷达、毫米波雷达、激光雷达(LiDAR)、高清摄像头等“感测”设备,采用视频与雷达数据融合技术,将车辆环境数据引入车辆自动驾驶控制解决方案,已在各主机厂广泛应用。
要实现自动驾驶,车辆必须能够观察周围的环境,且不仅局限于眼前。然而,“感知融合”方案受“感测”设备的超高成本、感测距离、盲区遮挡等弊端影响,无法满足自动驾驶的全部需求。故一种基于网络传输技术的“感测”手段V2X(Vehicle to Everything)技术正在兴起并成为自动驾驶技术的发展趋势。
车用无线通信技术(Vehicle to Everything,V2X)主要包含车辆与车辆(Vehicle to Vehicle,V2V)、车辆与基础设施(Vehicle to Infrastructure,V2I)、车辆与外部网络(Vehicle to Network,V2N)和车辆与行人(Vehicle to Pedestrian,V2P)组成,希望实现车辆与一切可能影响车辆的实体实现信息交互,可应用于驾驶辅助预警、驾驶辅助控制、自动驾驶等场景,目的是减少事故发生、减缓交通拥堵、降低环境污染以及提供安全类、效率类、服务类的信息交互。
2 V2X技术简介
2.1 专用短距离通信技术
专用短距离通信(Dedicated Short Range Communication,DSRC)技术其覆盖半径虽不大(约为500 m以内),但速度很快,可完成毫秒级运算,满足V2V系统每秒发送10条讯息的需求,这些即时性资讯包括加速度、车辆GPS位置信息、制动状态、转向盘转角与车速等。
国际上几大标准化组织从20世纪90年代开始,均开展了DSRC标准的制定工作,主要以美国的ASTM/IEEE[1]、日本的 ISO/TC 204[2]和欧洲的 CEN/TC 278[3]标准体系为代表。目前,国内采用5.9 GHz频段,物理层和无线链路控制基于IEEE 802.11p协议,顶层协议栈基于IEEE 1609标准,其定义了网络的架构和流程。V2V的信息交互使用轻量WAVE短消息协议(WAVE Short Message Protocol,WSMP),V2I和V2N的信息交互使用TCP/IP协议。另外,SAE J2735[4]和SAE J2945[5]定义了消息包中携带的信息。
2.2LTE-V2X技术
C-V2X是由第三代合作伙伴计划(3rd Generation Partnership Project,3GPP)定义的基于蜂窝通信的V2X技术,它包含基于长期演进(Long Term Evolution,LTE)以及未来5G的V2X系统[6-7],是DSRC技术的有力补充。C-V2X与基于IEEE 802.11p的无线技术相比拥有更佳的性能表现,包括支持更远的通信距离(约2倍)、更佳的非视距性能、增强的可靠性(误包率更低)、更高容量和在更密集环境中实现更好的拥堵控制。
2015年,3GPP正式启动基于C-V2X的技术需求及标准化工作,2016年,C-V2X的V2X标准Release 14正式冻结,这标志着3GPP完成了LTE-V第一阶段的标准,即基于终端直通(Device to Device,D2D)模式的车车通信(V2V)标准化,通过深入研究引入了更优化的物理层解调参考信号、资源调度、干扰协调等技术。我国于2015年启动了基于C-V2X技术的车联网频谱研究[8],2016年11月,工业和信息化部正式划分5 905~5 925 MHz频段用于C-V2X技术试验,根据目前产业发展状况,C-V2X有望于2020年实现规模试点或试商用。
2.3 5G-V2X技术
与4G相比,5G将支持更加多样化的场景,融合多种无线接入方式,并充分利用低频和高频等频谱资源。同时,5G还将满足网络灵活部署和高效运营维护的需求,大幅提升频谱效率、能源效率和成本效率,实现移动通信网络的可持续发展[9]。
C-V2X具备清晰的5G演进路径,并支持前向及后向兼容。具体来说,2018年,3GPP提出的Release-16 C-V2X拥有向基于5G新空口的C-V2X的强劲演进路径,可通过补充型及全新功能增强Release-14,同时保持后向兼容。与用于车辆间基础安全通信的Release-14相比,基于5G新空口的C-V2X可提供高吞吐量、宽带载波支持、超低时延和高可靠性,从而支持众多面向自动驾驶的先进用例,如传感器分享、意图分享和3D高清地图更新。
2.4 小结
从技术而言,C-V2X从技术持续迭代性、可靠性和信号传输迟滞性等来说与DSRC相比有较大优势,从产业化进程而言,C-V2X正在逐步缩小与DSRC之间的差距,不论未来全球的V2X市场中哪一个获得主导地位都将推动自动驾驶领域的技术发展。
3 C-V2X应用场景及网络通信需求分析
3.1 V2X网络通信协议分层结构
参考国际标准化组织(ISO)制定的通信系统7层参考模型及国内外正在制定的V2X车用通信系统相关标准的系统架构,V2X网络通信协议分层结构[10]如图1所示。

图1 V2X网络协议分层结构[10]
3.2 V2X应用场景及网络通信需求
V2X应用场景类型可分为辅助预警、执行控制和自动驾驶。其中,辅助预警又可分为安全、出行效率及信息服务。表1所示为目前国内主流的V2X应用场景。

表1 V2X应用场景
针对表1中的每个场景,都需要进行详细的场景定义,且需要对最恶劣工况进行需求分析,并对每个场景最恶劣工况下的网络通讯延迟、传输类型、信息大小、传输频率、通信范围、接受范围、可靠性、安全性、吞吐量、峰值速率、定位精度、支持度、最高车速、接收灵敏度等参数进行需求分析。
3.3 V2X应用场景及网络通信需求分析实例
本节针对表1中紧急制动预警(Emergency Brake Warning,EBW)应用场景,明确场景定义,阐述EBW的功能实现,提出对通讯相关具体性能参数的明确要求。
3.3.1 场景定义
主车(Host Vehicle,HV)在车道上行驶,与在正前方同一车道的远车(Remote Vehicle,RV)存在追尾碰撞危险时,EBW功能可对HV驾驶员进行预警,如图2所示。该场景功能适用于普通道路或高速公路等车辆追尾碰撞危险的预警。

图2EBW应用场景示意
EBW应用场景主要包括4种工况:
(1)HV行驶,RV在HV同一车道正前方发生紧急制动事件;
(2)HV行驶,RV在HV相邻车道前方发生紧急制动事件;
(3)HV行驶,视线被紧邻同车道车辆阻挡,RV在HV同一车道正前方发生紧急制动事件;
(4)HV行驶,视线被紧邻同车道车辆阻挡,RV在HV相邻车道前方发生紧急制动事件。
3.3.2 网络通信时延
EBW场景通讯传输时延需求为不超过100 ms。选择最恶劣工况:假设两车在高速公路上行驶,RV紧急制动,HV车速为法规极限车速132 km/h。则100 ms内两车间的距离因时延影响,会缩短3.67 m。安全预警距离一般比驾驶员实际制动距离长5~10 m,故由于通信时延产生的距离满足安全预警需求。
3.3.3 信息大小
支持传输的信息数据量不小于1 024 bit。
3.3.4 传输频率
目前GPS定位更新频率为10 Hz,故消息发送频率应至少与卫星更新频率保持一致,保证及时获取并更新车辆的GPS信息数据,实现即时广播。
3.3.5 通讯范围
通讯传输范围应不小于150 m。EBW场景下两车的安全距离为:

式中,vs和vf分别为HV和RV的速度;T为驾驶员的反应时间;t1、t2分别为制动协调时间和减速度增加时间,a1、a2分别为HV和RV紧急制动加速度;d0为静止时安全距离。
假设 T=2 s,t1=0.5 s,t2=0.2 s,本车最大速度为 vs=132 km/h,d0=3 m,a1=a2=6 m/s2,紧急制动前两车保持相对静止状态,则最小安全距离约为102 m,小于通讯传输范围距离150 m。
3.3.6 接收范围
针对于紧急制动预警功能,接收150 m范围内车辆的消息即可。
3.3.7 可靠性
在有效通信范围内,丢包率不超过10%。
3.3.8 峰值速率
在繁忙的交通路况条件下,通讯范围内周边车辆可多达300辆,每辆车发送安全预警类消息约128 Byte,频率为10 Hz,则每秒通信数据量为384 000 Byte,峰值速率约为0.37 Mb/s。
3.3.9 吞吐量
V2V应用功能中,峰值速率可能达到0.37 Mb/s,对于V2I应用功能,还需支持红绿灯信息、路标信息、施工信息等低频率广播(约1~2 Hz)数据。所以,总体吞吐量需超过0.5 Mb/s。
3.3.10 定位精度
EBW预警需确定两车所处的车道情况,现有中国车道宽度一般为2.75~3.5 m,可取3 m作为参考依据。假设HV和RV在车道中间行驶,以车头位置的横坐标为基准,若定位偏差全部产生在横向,仍然应能确定两车是否处于同一车道或相邻车道,可支持避开碰撞方向,因此定位精度应小于1.5 m,直至达到亚米级。
3.3.11 支持的最高车速
设 S=150 m,T=2 s,t1=0.5 s,t2=0.2 s,d0=3 m,a1=a2=6 m/s2,根据式(1)可得两车最高车速为195 km/h,满足我国高速公路限速要求。
3.3.12 传输类型
所传输的信息紧急、紧急等级的最高。
4 C-V2X示范运行车演示实例
为推进C-V2X产业化进程,近年来,国家智能交通综合测试基地及车联网应用示范区先后在多地建成。2016年以来,中国一汽(China FAW)积极参与推动C-V2X产业化进程,完成国家智能网联汽车应用(北方)示范区建设,搭载LTE-V2X设备的红旗H7 PHEV示范运行车已实现包括前碰撞预警、交叉路口碰撞预警、盲区预警、紧急制动预警等10余种应用场景。
其中,针对紧急制动预警应用场景,共完成4项测试用例的实车路试演示,如图3、表2、表3、表4和表5所示。
图3为红旗H7 PHEV C-V2X示范运行车在EBW应用场景下的路试实景图。

图3 红旗H7 PHEV EBW应用场景路测实景图
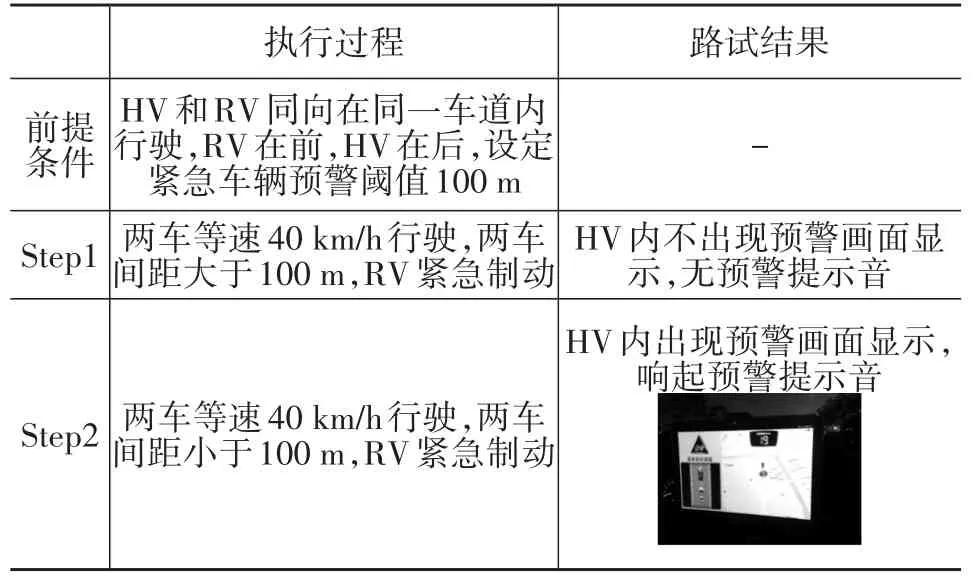
表2 Case1.1—紧急制动预警-同车道1

表3 Case1.2—紧急制动预警-同车道2

表4 Case1.3—紧急制动预警-不同车道1

表5 Case1.4—紧急制动预警-不同车道1
从Case1.1~1.4可知,FAW已针对EBW应用场景的前两种应用工况进行了测试验证,测试实例设置的参数虽不同于3.3节提出的最恶劣工况下的网络通信需求,但也满足城市工况下的参数设置。从测试结果可知,在相同或相邻车道同向行驶且无紧邻车辆遮挡的HV可以有效识别出RV的紧急制动行为,并进行有效的预警提示,满足应用场景功能需求。
5 V2X未来展望
未来5~10年,为了解决交通安全、出行效率、道路承载、环境保护等问题,车联网将全面发展。将V2X技术与ADAS的多种探测手段相结合,借助融合信息处理技术,能够更加有效地改善行车安全、提高交通效率,单车智能化与车联网的有机结合将最终实现自动驾驶。V2X无线网络通信技术也面临着低时延、高可靠性、高传输速率和高容量的多重挑战。随着LTE-V2X技术产业化链条的不断完善及5G技术的商用化推进,C-V2X将会迎来更加广阔的发展空间。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
包装工程(2022年1期)2022-01-26
卫星应用(2021年11期)2022-01-19
意林原创版(2021年7期)2021-08-03
煤气与热力(2021年4期)2021-06-09
计算机与网络(2021年5期)2021-06-01
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
数字技术与应用(2018年7期)2018-10-10
小说月刊(2014年11期)2014-04-18