
GNSS技术在城市边坡监测中的应用
2019-08-28 03:47熊寄然
重庆建筑 2019年8期
熊寄然
(重庆悦来投资集团有限公司,重庆 401120)
0 引言
我国是地质灾害频发的国家,而滑坡是一种常见、多发的地质灾害现象,被认为是仅次于地震的第二大地质灾害。据统计,我国共发育有大型滑坡140余处,较大滑坡2212处以上[1]。
滑坡广泛被认为是在一定环境下斜坡岩土体在重力的作用下,由于受到内、外因素的影响,使其沿着坡体内一个(或几个)软弱面(带)发生的剪切下滑现象[2]。近几年,我国地质灾害频发,滑坡、泥石流等地质灾害严重威胁到人民的生命财产安全。如何对已知的、有滑坡趋势的滑坡体进行监测,掌握其稳定性状态并及时进行预警,是一项急切的任务。
GNSS作为现代大地测量的一种高技术手段,具有高精度、高可靠性、高效率、自动化程度高以及劳动强度低等特点。利用GNSS对滑坡体监测,从理论到实际,都已通过若干实验检验,其完全可以作为一种新的监测技术应用到工程实际中去。本文以重庆悦来场馆边坡GNSS监测为例,介绍了GNSS技术在滑坡监测中的应用以及使用Trimble Business Center(以下简称TBC)软件对GNSS数据的解算过程。
1 工程概况
重庆悦来场馆边坡位于重庆市悦来国际博览中心西侧,为高填方边坡,边坡高差约50m,长度约1200m。
该边坡处于嘉陵江东岸,为建设重庆国际博览中心场馆土石方平场时形成的高填方边坡,由于填方量巨大,土体尚未完成固结沉降,通过边坡顶部滨江路面出现的局部裂缝显示,受雨水冲刷及嘉陵江周边水体影响,填土的物理力学性质降低,该边坡存在滑坡的迹象,开展边坡实时监测是必要的。特别在江水水位抬高后,填方土体在地下水作用下,物理力学性质降低,以及在水压力作用下,可能产生顺层基岩滑坡。
2 GNSS测量原理
GNSS的全称是全球导航卫星系统 (Global Navigation Satellite System),它是泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的WAAS(广域增强系统)、欧洲的EGNOS(欧洲静地导航重叠系统)和日本的MSAS(多功能运输卫星增强系统)等。
各个导航卫星系统主要包括三部分:地面控制中心、导航卫星、GPS接收设备。主要功能:定位、导航、授时。
GNSS测量原理为,通过伪距或载波相位测量方式测定卫星与接收机设备之间的距离,通过一系列算法和计算模型剔除电离层、卫星钟差、接收机钟差等因素的影响,从而获得高精度星地距。再通过GNSS基线网平差,得到mm级点位精度成果。目前已广泛应用于大范围滑坡体的位移监测。
GNSS监测与传统全站仪监测相比,具有高效、快速、实时、大范围、自动化等优点,全站仪监测要求点位通视,距离限制较短。因此,在大范围的滑坡监测中,GNSS自动化监测是首选。
2.3 RANK基因甲基化与新疆汉族、维吾尔族、哈萨克族老年男性高密度脂蛋白胆固醇相关性 在新疆维吾尔族、哈萨克族老年男性中,对照组RANK基因CpG岛甲基化率低于病例组,差异有统计学意义(P<0.05);在汉族老年男性中,对照组RANK基因CpG岛甲基化率低于病例组,差异无统计学意义(P<0.05)。见表3。
3 GNSS监测网设计
GNSS监测网点的设计包括基准点的设计和监测点的设计[3],GNSS监测网基准点点位的确定原则要充分考虑到:
①地质条件好,点位稳定;
② 适合GNSS观测条件,并无显著多路径效应;
③尽可能选用经实践证明点位稳定的原滑坡区域内的基准网点。因原基准点都经过地质勘探,且建有稳固的观测墩,便于稳定性分析。
GNSS滑坡监测的监测点点位的选定应该能适合GNSS观测条件,并有效地反映滑坡变形的特征。具体地说,滑坡监测点应沿滑坡主滑线布设;监测点周围障碍物的高度角要小于15°;监测点应远离大功率无线电发射源和高压输电线,以避免周围磁场对GNSS信号的干扰。
鉴于悦来场馆边坡存在的高差较大、植被茂密、山体坡度大的特点,在设计监测网时充分考虑到植被、水体等容易产生的多路径影响,故布设了四个基准点。这些基准点位于离边坡3km左右的稳定岩体上,其中PM11-PM08基线之间距离最长(3.5km),PJ01-PJ02基线之间距离最短(200m),另外有一个用于加密控制网的点PJ01(图1)。变形监测点位于滑坡体变形明显的敏感部位,共设15个监测点,分别为PJ01—PJ15。所有点位均埋设测量墩,采用强制对中装置,测量墩上设置天线指向标志。为减少仪器误差的影响,对于每个点只用同一台仪器进行观测,天线指向与标志对齐,精密测量天线高。
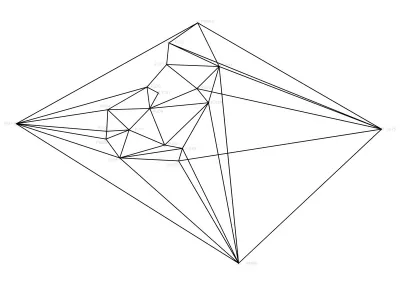
图1 GNSS基线网图形
4 数据处理
4.1 GNSS数据
数据选用2018年8月、2018年11月、2019年2月三期GNSS数据,使用的仪器为8台Trimble R8型接收机。
观测方法为,对作为基准站的PM11和PM08两点连续观测,其余4台接收机接收数据时,保证和监测点、基准站构成同步环。因此,每天只能完成两个基准站和4个监测点的观测。完成PJ01—PJ15点的观测任务需要四天时间,第五天对前期观测数据不好的点补测。
4.2 解算软件
软件使用TBC对监测数据进行解算。平差使用武汉大学CosaGPS软件。运用精度评定和可靠性检验,保证平差结果的质量。
4.3 数据解算
全部GNSS数据导入TBC之后,首先对每个点进行检查,检查各个点的天线高,查看点位的内可靠性,剔除观测数据中的错误点号。
GNSS基线解算主要参数设置:①卫星钟差的模型改正使用广播星历中的钟差参数[4];②根据由伪距观测值计算出的接收机钟差进行钟差的模型改正;③电离层折射影响用模型改正,并通过双差观测值来削弱;④对流层折射根据标准大气模型用Hopfield模型改正;⑤卫星截止高度角15°,数据采样率均为15s;⑥DOP值、方位角、高度角存储率为数据率的20%;⑦周跳的修复,根据滑坡短基线的特点,采用L1、L2双差拟合的方法自动修复周跳;若采用上述方法仍然得不到固定解,则在“结果”栏中,分析该监测点残差,再返回到“GNSS处理”栏,选择消除电离层(L3)[5],再解算就可得到好的结果;⑧为避免起始坐标偏差的影响,在每期解算中,起始点坐标均采用TM30精密测得的结果。
采用PM11、PM08再加一个监测点构成同步环(三角形)解算,如:PM11-PM08-PJ01、PM11-PM08-PJ02等。这样就可以减弱监测点本身由于信号差带来的影响,增强同步环的图形强度,从而得到各个监测点的最优基线解。
解算完基线后再到“平差”栏中对基线网平差、闭合环进行计算,在网平差报告里可分析基线向量和残差等指标,在闭合环报告里可得到闭合环的精度。
经过无约束平差后再经过基准/投影进行坐标转换,得到地方坐标系下的坐标。
5 解算结果与分析
5.1 GNSS监测成果分析
通过对第2、3期监测成果对比分析,可得到各点位在X、Y方向上变形量均在mm级,在H方向变形量稍大,量级约cm级,整体而言,在X、Y方向上精度优于H方向。各监测点位移量如表1所示。
5.2 GNSS与全站仪监测成果对比分析
为了验证GNSS监测成果的可靠性,在GNSS监测点位上架设自动化全站仪实施同点位监测。选取其中的监测点位PJ02、PM08、PM11三个点位的坐标成果进行对比,成果对比如表2所示。
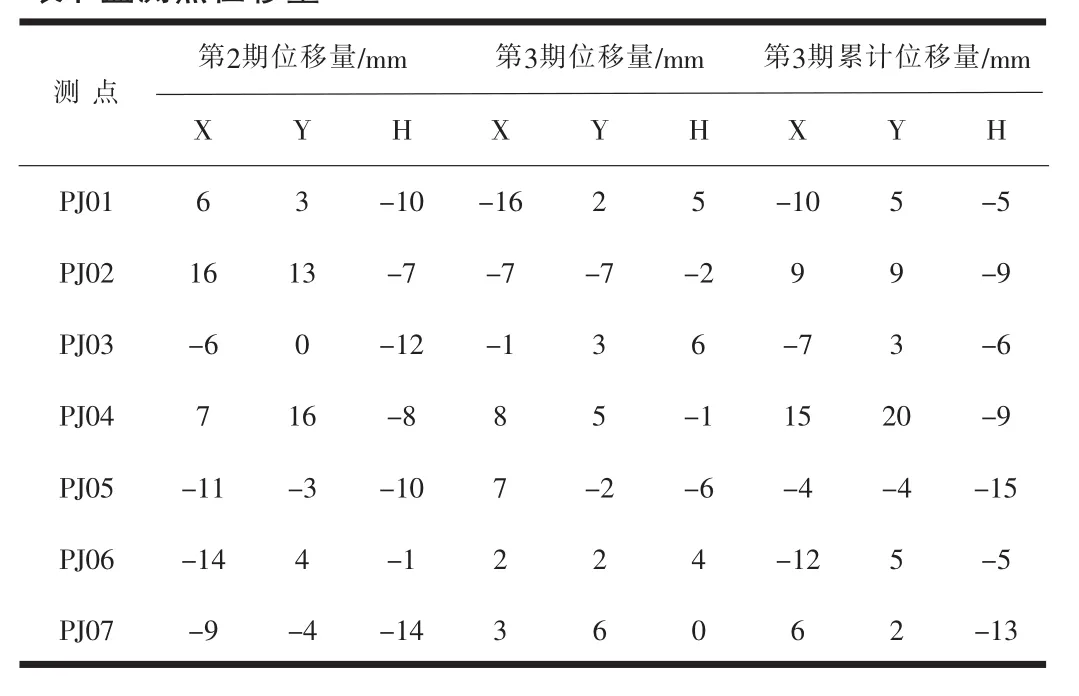
表1 监测点位移量
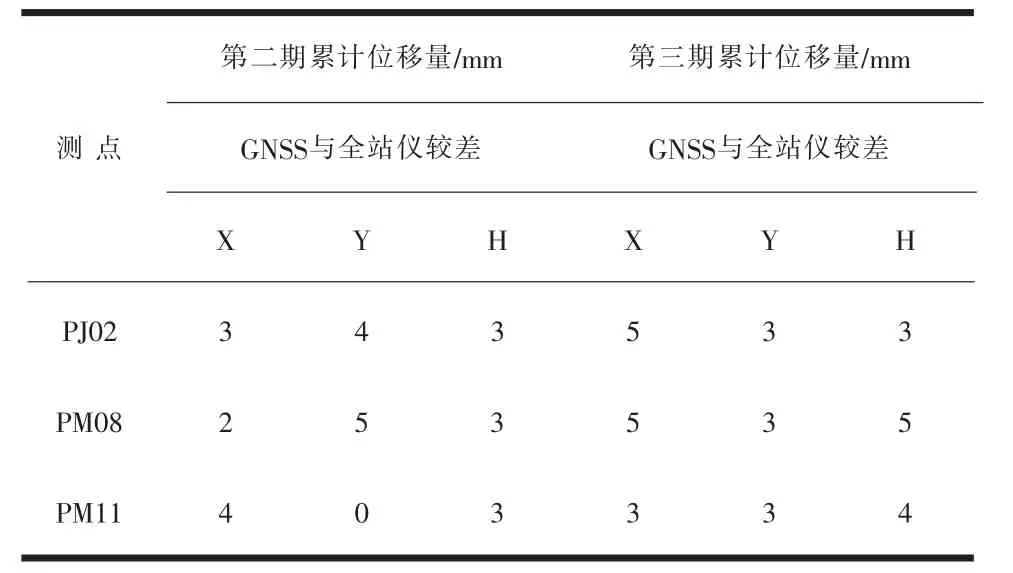
表2 GNSS与全站仪精度对比
从表1对比可以得到:第二期相对第一期在平面上的位移量最大为16mm,最小为0,高程方面最大11mm,最小1mm;第三期相对第二期在平面上的位移量最大为16mm,最小为1mm,高程方面最大6mm,最小0。监测点在X、Y、H方向的位移量如图2—图4所示。从表2 GNSS与全站仪监测精度对比可以得到:GNSS监测精度与全站仪相当,且成果稳定性较好。根据《工程测量规范》[6]的规定,平面和高程完全符合规范的规定,说明边坡是相对稳定的。
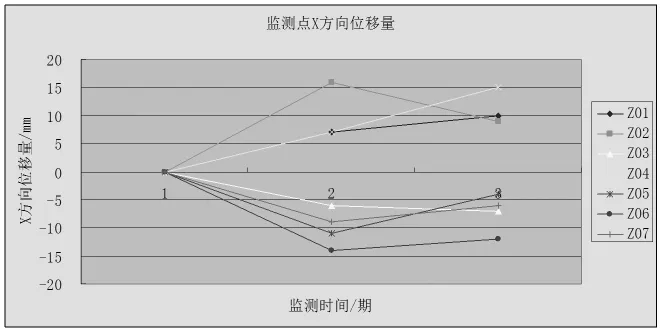
图2 监测点X方向位移量
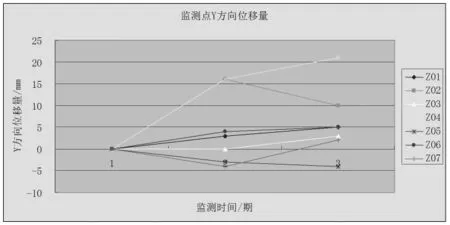
图3 监测点Y方向位移量

图4 监测点H方向位移量
6 结语
通过对重庆悦来会展场地边坡的三期GNSS监测数据进行分析,可以得到:GNSS监测技术精度与全站仪监测精度接近,在诸如大范围、长距离边坡监测中可替代全站仪。GNSS监测的高精度、高可靠性、高效率是值得肯定的。
但GNSS监测系统也存在自身设备及监测系统的局限性,如:GNSS接收机必须安装在较开阔的位置,以便于接收到足够的卫星信号解算监测点变形量。
为了解决GNSS监测系统局限性问题,工程上可将GNSS监测系统结合自动全站仪,将GNSS设备无法实施的位置用全站仪实施监测。
猜你喜欢
矿产勘查(2020年1期)2020-12-28
航天制造技术(2020年4期)2020-09-11
水电站设计(2020年4期)2020-07-16
黑龙江水利科技(2020年3期)2020-05-22
制造技术与机床(2018年12期)2018-12-23
铁道标准设计(2018年12期)2018-11-22
证券市场红周刊(2018年37期)2018-05-14
科技知识动漫(2017年7期)2017-08-09
科技知识动漫(2016年12期)2016-12-23
浙江大学学报(工学版)(2016年10期)2016-06-05
