
海洋油田平台水下安防系统航迹融合与报警技术
2019-08-28 01:16:32张翔龙
数字海洋与水下攻防 2019年3期
代 笠,张翔龙
(海装广州局,广东 广州 510000)
0 引言
水下安防系统是一套以被动声呐、海面定位雷达和AIS等探测设备为硬件基础,以系统控制与报警软件为数据处理中心的海上油田平台安防报警系统。能够对油田水面/水下等外部目标进行集中监控,并在油田水下管缆和设施位置电子海图的配合下,自动识别判断各种目标的威胁程度,及时可靠地做出分级预警和报警,为采取进一步的取证和管制措施提供切实依据,降低油田设施被外部威胁目标破坏的风险[1]。
安防系统是一个典型多源异构数据融合报警系统,探测信息来自雷达、声呐、AIS等,有信息数量大、关系复杂、探测精度差异大、数据格式不统一、内容各异以及安防系统对信息处理实时性要求高等特点,使得在综合多传感器优点处理多源数据,对威胁目标实施精确预报存在较大困难。目前成熟的多源信息融合技术虽然融合的信息源较多,但传感器类型比较单一,如融合多台雷达或多台声呐等,信息处理复杂性低,有关技术难以满足水下安防系统的实际需要。因此,研究适用于水下安防系统的数据融合与报警技术,实现将某一目标的多源信息(雷达、声呐、AIS探测数据)进行检测、相关、估计和组合以达到对跟踪目标进行精确状态估计、身份识别、威胁评估和辅助决策的目的。
1 数据融合与报警模型
根据水下安防系统采用水下声呐、雷达以及AIS组合探测目标的方案,水下安防系统信息融合与报警技术采用多级融合模型构建,来完成数据融合分析与报警处理工作,共分5级,其分级模型结构如图1所示。
由图1可知,第一级传感器检测级融合由安防系统的声呐、雷达完成,本文中的数据融合与报警技术涉及模型中的第2到第5级。一般来讲,第2级目标位置融合处理的性能直接影响目标轨迹、属性、态势的融合及对威胁的估计,因此目标航迹的关联和融合算法是该项关键技术的核心。
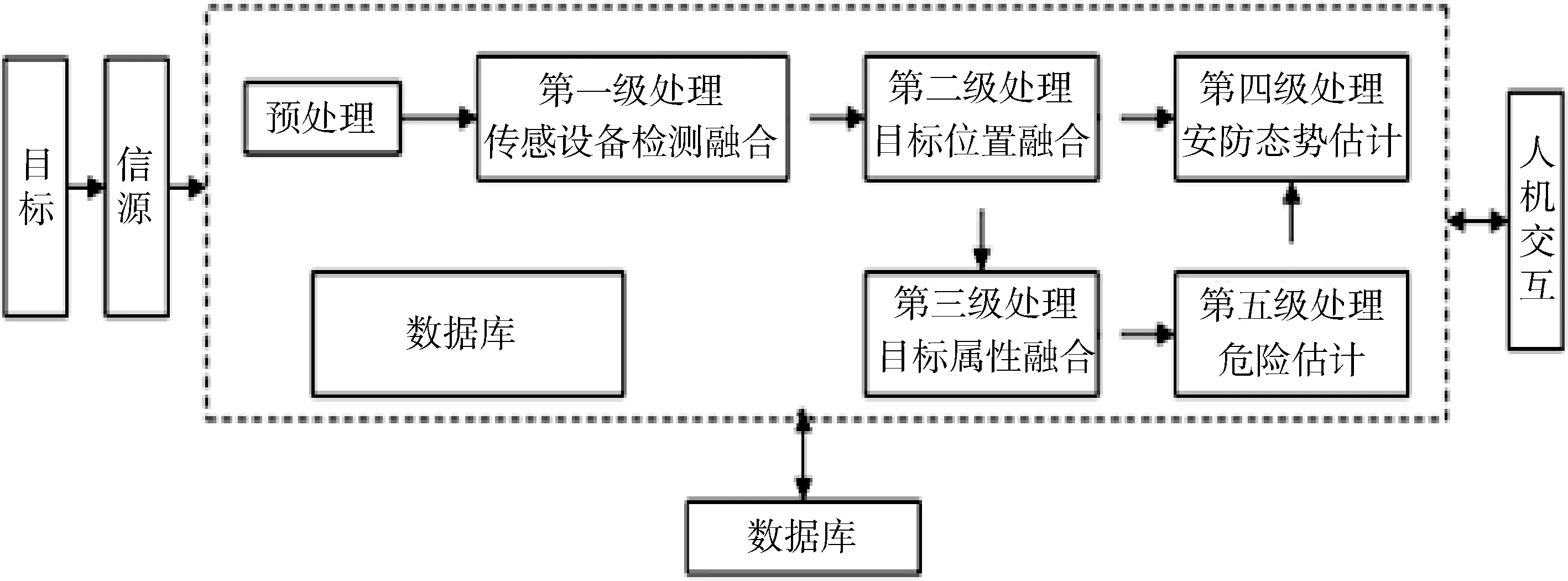
图1 多级融合模型结构图Fig.1 Structure diagram of multistage fusion model
在分布式信息融合系统中航迹关联算法通常有基于统计数学的方法、基于模糊数学的方法、基于灰色理论的方法和基于神经网络的方法。表1将几种常见航迹关联方法的性能进行了比较。
由表1可知,MK-NN法在基于统计数学的方法中具有最好的性能,基于模糊数学和灰色理论的算法同样具有较高的性能,考虑到参数设置过于复杂,可能导致工程应用较为困难,选择MK-NN算法既能够满足性能要求,也便于工程应用。
2 航迹关联算法
航迹关联算法是融合模型的第 2级位置级的数据融合的关键,航迹关联模块接收雷达、声呐、AIS的目标航迹数据,基于MK-NN(修正的K近领域关联算法)算法实现不同传感器间多个目标航迹之间的关联映射,为航迹融合提供输入[2-3]。在进行航迹关联前的航迹应用具备了以下条件:1)各传感器已形成局部航迹(条数可以不相等),且同一传感器的同一航迹号唯一标识一条航迹;2)在每一关联时刻,关联模块的输入点数与局部航迹总数相等,即输入的局部航迹对关联算法来说无丢点现象,丢点后重新出现的局部航迹一律视为新航迹(先前的局部处理可在向关联模块提供输入前进行必要的航迹补点处理);3)对于符合假设2)的多条局部航迹,已完成了时间/空间同步处理。
当有满足上述条件的局部航迹输入时,MK-NN算法首先进入关联期,考虑到在航迹关联检验中,对关联期中每个时刻的状态估计是逐步处理的,为使得在后期的关联赋值更加可靠,算法把当前的检验与其历史联系起来,把整个关联检验分为关联期、检查期和保持期,按以下图2的流程进行处理。
对于图2流程,做以下说明:
1)关联期需指定关联周期数N及门限K。关联周期数的选择通常与目标分布、运动规律和采样间隔有关。目标分布越密集则关联周期数越大,目标速度越小、采样间隔越大则关联周期数越小,一般取 6~12;K按航迹质量阈值比较时实际完成关联周期数(不大于N)的一定比例取整得到,该比例一般大于0.5且不大于0.75。
2)单次关联检验采用 NN准则,即判断局部状态估计之差的每个分量小于阈值向量的对应分量是否同时成立,其中阈值向量直接依赖于状态估计误差协方差,通常可取为

式中:G为门限系数,一般情况下取3,目标机动时取 5;K为关联周期计数变量;q为状态自由度计数变量;eq为阈值向量的第q个分量;为局部航迹g状态估计协方差矩阵的第q个对角元素;为局部航迹h状态估计协方差矩阵的第q个对角元素。当无法获得时,可直接用相应分量的测量方差近似代替。
3)由于通过关联期的关联对可靠性已经较高,检查期应采用更严格的检验条件进行正确性检查,故选择的检验统计量为

式中:β为阈值系数;wgh(k)为第k个关联周期局部航迹g与h的检验统计量;Xg(k)为第k个关联周期局部航迹g的状态估计向量;Xh(k)为第k个关联周期局部航迹h的状态估计向量;Pg(k)为第k个关联周期局部航迹g的状态估计协方差矩阵;Ph(k)为第k个关联周期局部航迹h的状态估计协方差矩阵。
与关联期不同,当用测量方差矩阵代替状态估计协方差矩阵时,阈值系数要做适当调整,且阈值应严格根据相应自由度的卡方分布在指定的显著性水平下确定。
3 航迹融合算法
航迹关联完成后即可直接将相关的局部航迹输入航迹融合模块进行处理。同样,借鉴工程应用较成熟的加权融合算法的思想实现该模块[4-9]。算法的基本融合公式如下:

式中:X为融合输出状态向量;N为传感器数目;xi为第i个传感器输入的状态估计向量;Pi为第i个传感器输入的状态估计误差协方差矩阵。
由于本项目中前端传感器不能提供Pi,本模块特别设计了一种自适应权值估计算法,具体描述如下:
根据经典统计理论我们知道,多个独立随机变量的线性组合具有比其中任何一个更小的方差。由于确定时刻的各局部估计正好可以用独立随机变量来描述(这里忽略了基于相同跟踪模型的多个传个器间的相关性,对简化实际工程应用中的算法是有益的),所以多源航迹融合的权系数与各局部估计的方差密切相关,优良的权系数应使融合输出的方差最小。这可由拉格朗日乘数法得到,如式(4)所示:
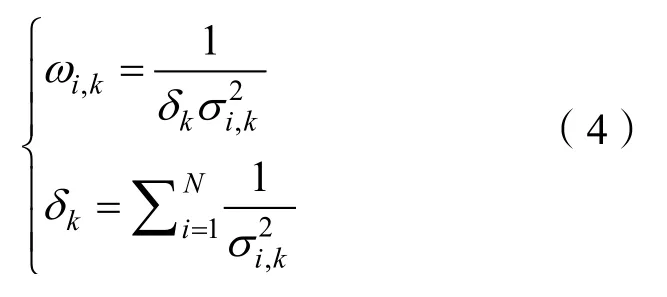
从中可以看出,问题的关键在于如何在仅有最基本的状态信息可利用的应用条件下实时地估计局部状态估计各分量的方差。本项目中按以下步骤来解决这一问题:
2)对于第k(k>1)个融合周期,用第k-1个融合周期的权系数ωi,k-1(i=1,2,…,N)对该周期的局部状态加权求和,结果作为该周期的全局状态预测:

3)对于每一个传感器i(i=1,2,…,N),以其最近M个融合周期的局部状态估计作为样本,进行状态估计的方差估计,如式(6)所示(当k<M时M退化为k):
4)利用式(5)得到的结果根据式(4)计算权系数ωi,k(i=1,2,…,N)并按式(7)完成当前融合周期全局状态估计Xk的计算:

5)重复步骤2)-4),实时计算全局状态估计输出。
4 报警策略研究
水下安防系统的最终目的是对监测目标进行威胁评估,根据船只对油田管线和平台破坏的情况分析,大多数情况为船只随意抛锚、非法挖沙行为造成的破坏,因此,水面目标船只有威胁的行为特性是在管线和平台附近有停船行为。一般情况下当只有声呐探测时无法判断目标属性,即是否为水下或水面目标,只有经过3种探测设备进行位置融合处理后才能分辨目标位置属性。水下目标一般是蛙人、UUV等,当目标为水下目标时,其报警策略与水面目标不同,即认为水下目标进入油田作业区域,需要重点关注。如图3为监测目标的报警流程。
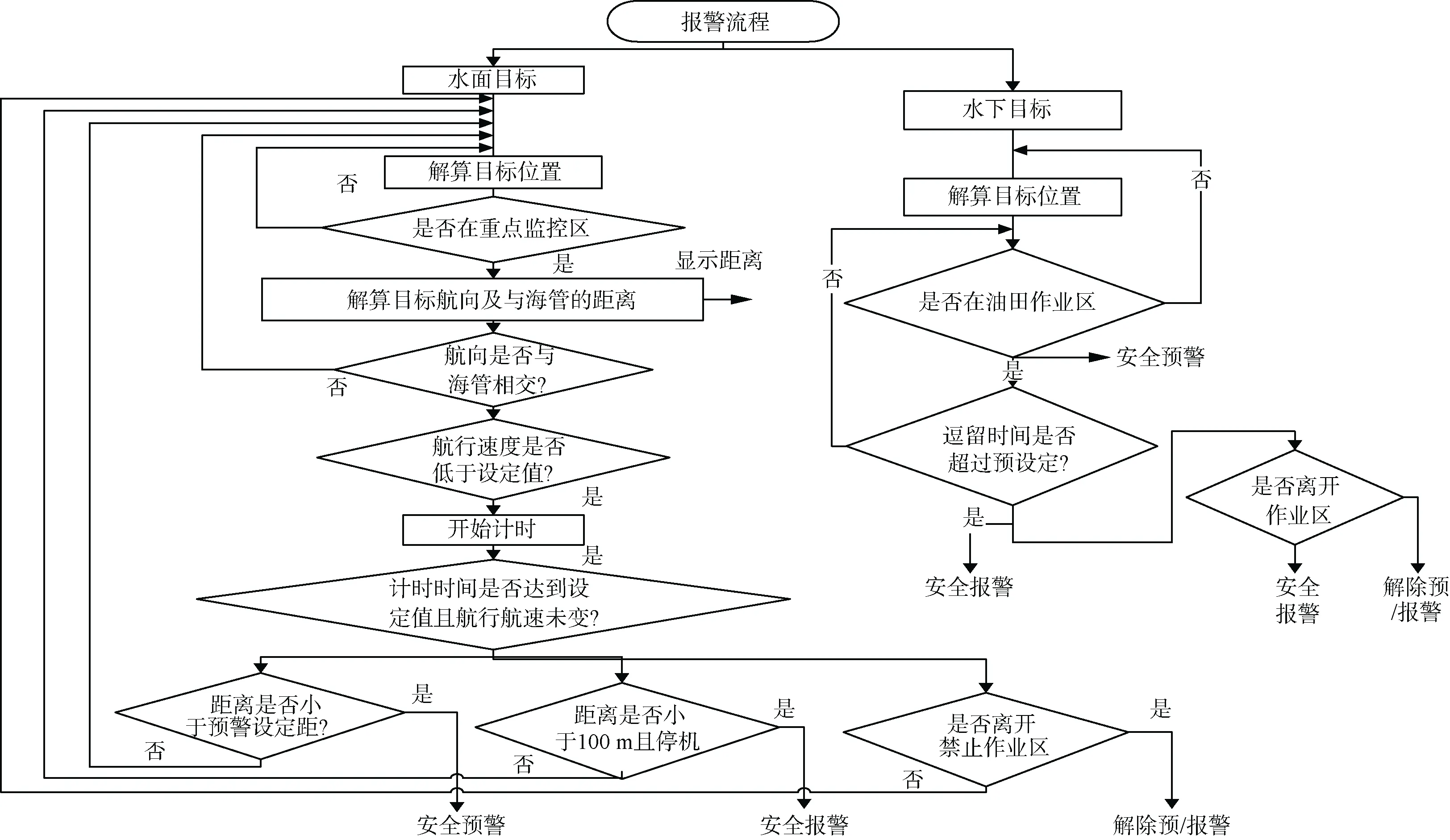
图3 监测目标的报警流程Fig.3 Alarm process for monitoring targets
5 仿真情况
为检查航迹融合方法的融合效果,采用仿真的方法进行理论研制。设船只在30 kn以内先后经历匀减速、匀速、匀加速过程,2个传感器每5 s各输入一个航迹点,误差均为 10 m,融合中心不做滤波处理直接融合,每10 s输出1个点。理论上融合输出最大误差为各传感器误差之和(20 m),而显示融合输出最大误差约为15 m,融合效果明显。
6 实际应用情况
该数据融合与报警技术城管运用于 SZ36-1、QHD32-6、BZ28/34等多个海洋油田平台水下安防项目,取得了良好的效果。
1)关联融合实际应用情况。雷达、声呐、AIS探测数据关联的过程,在关联融合成功后原先的 3条航迹合并成1条,探测目标各种属性也完成融合,获取目标的信息量比单传感器数据要丰富许多。
2)安防报警实际应用情况。安防系统监测到注册船只LANJIANG可能威胁到平台安全,产生报警信息后的回放取证图。2014年11月16日 18点40分至2014年11月21日02点00分离开,安防系统监测到注册船只 LANJIANG停靠在距离 WHPG平台 60 m处(119.227 079°E,39.135 527°N)进行施工共6天,可能威胁到平台和管缆安全,系统自动给出报警提示信息,该船只停泊6天后离开该区域,报警自动解除。
安防系统监测到在 2014-11-19T 15:09:30至2014-11-21T 01:03:53之间货船LIDIAN20在FPSO平台到 WHPF平台注水管道/混输管线/电缆,WHPA平台到WHPE平台电缆/注水管道/混输管道附近,距离14~25 m的位置长期停泊(超过10 h),安防系统给出报警提示,如图4所示。

图4 注册船只威胁平台及周围管线态势图Fig.4 Registered vessel threat platform and surrounding pipeline situation map
3)数据记录统计情况。对QHD32-6油田安防系统进行的不完全统计情况:监测时间从2014年8月—2016年 3月,按预警和报警的条件,共监测到潜在危险情况11 010余次。其中针对非注册船只的预报警数量800余次,针对注册船只的预报警数量10 100船/次,针对平台的报警3 600余次,针对管缆的报警7 300余次。安防系统监测记录信息460 159 389条,数据库大小130 GB。
数据记录总条数与报警分布情况如图5所示。
7 结束语
数据融合技术可以将各信息采集的不完整信息加以综合及关联,减少多源信息间可能存在的冗余和矛盾信息,降低其不确定性,提高智能系统决策、规划、反应的快速性和正确性。水下安防数据融合与报警技术自首个安防系统成功应用以来,经过多次完善,性能和可靠性得到大幅提升,尤其在后续的QHD32-6和BZ38/34安防系统中的成功运用,有效提高了海上油田水下安防系统分级预报警自主决策能力。
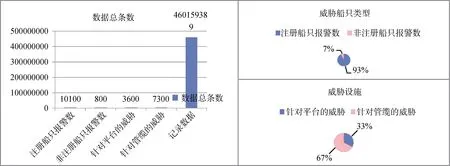
图5 数据记录总条数与报警分布情况图Fig.5 Total number of data records and situation diagram of alarm distribution
猜你喜欢
青年歌声(2019年12期)2019-12-17 06:32:32
当代陕西(2019年15期)2019-09-02 01:52:00
铁道通信信号(2018年5期)2018-06-28 03:06:12
学苑创造·A版(2018年11期)2018-02-01 06:29:20
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
读者(2017年5期)2017-02-15 18:04:18
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
汽车维护与修理(2016年10期)2016-07-10 08:17:41
小学生·多元智能大王(2015年3期)2015-05-25 11:31:43
汽车维护与修理(2015年6期)2015-02-28 12:17:04
