
基于跟踪雷达的模拟水柱信号发生器设计
2019-08-27 10:03贺博荣
火控雷达技术 2019年2期
贺博荣 段 飚
(西安导航技术研究所 西安 710068)
0 引言
雷达作为现代高科技技术系统广泛应用于舰载、机载及车载[1-4],尤其在现代武器装备中发挥着极其重要的作用。随着我国海军的强大与发展,我国舰载雷达发展迅猛,火控雷达在近程防御中因其测量精度高而倍受关注[5]。舰炮对海射击时为保证射击精度往往需要依据上次弹着点位置进行误差修正,而弹着点位置的测量通常需要火控雷达[6]来完成.当火控雷达探测到目标后,就要从目标回波中提取有关信息,获取目标的距离和空间角。火控雷达在跟踪目标的同时需要对弹着点的水柱进行跟踪才能确定炮弹的具体位置,以此来修正下次射击的偏差量。因此,火控雷达对海跟踪时水柱测量是炮弹校偏时极其重要的一项指标,直接影响舰炮对海射击的精度。跟踪雷达作为火控系统的分系统,在单机调试和系统联调时由于条件所限无法进行真实水柱测量,而是使用其他外部设备模拟水柱信号来检测雷达的水柱测量性能。在实际的测量中,往往需要使用脉冲信号源、微波信号源或中频信号源、频谱仪、连接线缆、功分器及调制器等。由于试验中使用的仪表繁多,操作方法繁琐,在调试和交验时往往费时费力,加之仪表操作不当或调试人员仪表不熟悉时会耽误很多时间。结合工作实际,我们设计出了一种便携式模拟水柱信号发生器,它取代了水柱测量时使用的仪表和连接设备及电缆等,具有体积小、集成度高、操作简单,携带方便等优点。该设备在雷达调试模拟水柱测量中作为模拟信号源性能得到验证,准确产生了需要的水柱信号,在雷达整机测试中得到了预期的结果。
1 模拟水柱测量原理
试验中某型跟踪雷达在对海工作方式下进行两种模式的模拟水柱测量,即手动水柱测量和自动水柱测量。手动水柱测量方式下,模拟水柱信号发生器(以下简称设备)产生手动水柱信号,送入雷达中频接收机,此测量方式需火控台配合。火控台手动输入距离和批次号,允许水柱测量。设置设备参数调整水柱信号的大小、宽度、延时,使其落在检测波门内。收到火控台允许水柱测量指令后雷达操控台上可观测到水柱批号,数量等数据。自动水柱测量方式下,设备产生自动水柱信号送入雷达中频接收机,设置设备参数调整水柱信号的大小、宽度、延时,使其落在检测波门内。雷达操控台上设置虚拟水柱及允许水柱测量,水柱数量及距离自动显示在操控台上。
2 模拟水柱信号发生器的组成及工作原理
2.1 模拟水柱信号发生器的组成
该设备替代了某型跟踪雷达水柱测量时所使用的仪表、连接设备及电缆,具有体积小、集成度高、操作简单等优点。设备由电路和结构两部分组成,电路部分包括电路板和连接器,结构部分由壳体和盖板组成。设备实物图如图1所示。
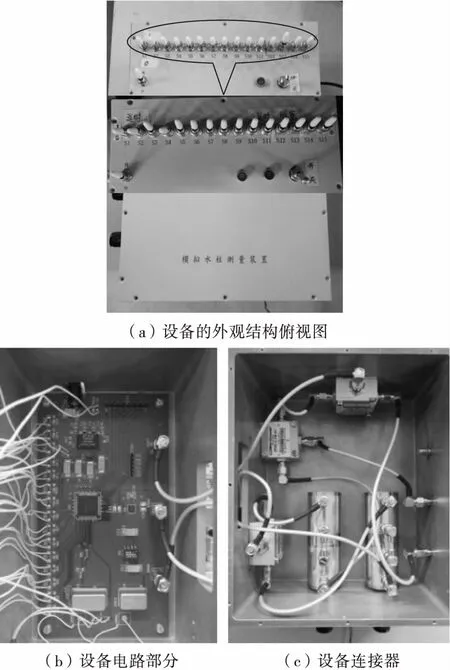
图1 设备实物图
图1(a)为设备的外观结构俯视图,最上面一排中S1~S11用来调节水柱信号的延时,S12,S13调节水柱信号的宽度;图1(b)为设备电路板部分;图1(c)为设备连接器部分。左侧两个黑色旋钮用来调节水柱信号和杂波信号的大小,旋钮分粗调和细调,最小量程1dB。S14备用,S15用于设备自检。
2.2 模拟水柱信号发生器的工作原理
该设备原理框图如图2所示,所有雷达测试所需的信号均由设备本身产生,只需提供雷达的100M时钟信号和外触发信号。设备工作时100M时钟信号由雷达提供,触发脉冲也由雷达提供作为同步信号,自检时100M时钟信号由设备晶振CRY1产生 。水柱信号延时通过S1~S11来调整,S11为最小码值,为1;S10码值为2,以此类推S1为最大码值,为1024;CPLD芯片使用25M计数,每个计数单元即为40ns,最大延时根据等比数列求和可算出为40ns×2048= 81.92μs,略小于对海重频下的周期;当对海重频发生变化时可相应改变计数单元来改变延时。水柱信号宽度通过S12,S13来调整,共4个档位,即“S12S13”为“00”、“01”、“10”、“11”,分别对应200ns,300ns,400ns和500ns。
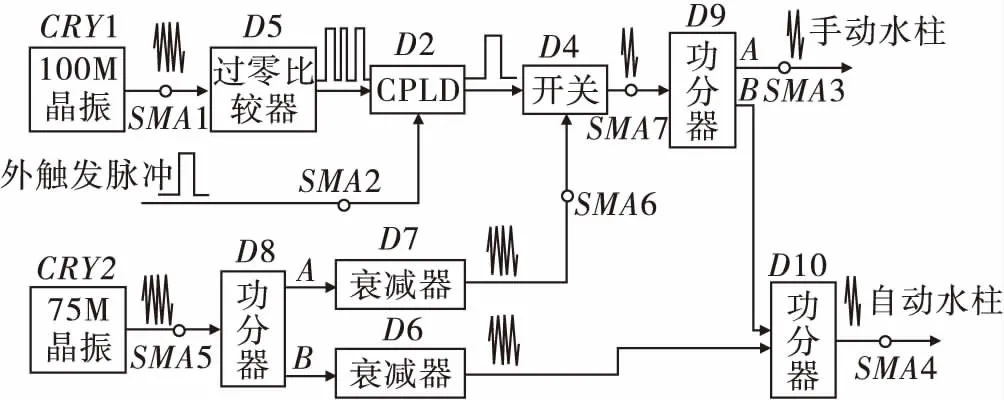
图2 模拟水柱信号发生器原理框图
3 手动水柱信号的产生
CRY1晶振输出100M模拟信号,经过过零比较器D5整形后送到CPLD芯片D2中,送入D2中的100M信号四分频产生25M信号,该信号作为时钟信号来计数。外触发脉冲作为同步信号送入D2芯片中,D2最终输出延时、脉宽可调、与外触发脉冲同步的信号T1。该T1信号作为调制信号送入集成STSP吸收式开关芯片D4中。 CRY2晶振产生的75M连续波信号经过功分器D8分为二路,A路经过衰减器D7输入到D4芯片,经过T1调制后的75M连续波信号通过D4芯片内的控制开关输出和T1宽度相同的75M调制信号,该75M调制信号经过功分器D9输出A路即为我们需要的手动水柱信号。
4 自动水柱信号的产生
CRY2晶振产生的75M连续波信号经过功分器D8分为二路,B路经过衰减器D6输出作为杂波信号,杂波信号可通过衰减器调节大小。从功分器D9 B路输出的信号(即手动水柱信号)和杂波信号经过功分器合成输出,即为自动水柱信号,SMA1~SMA7共7处通过SMA电缆连接。
5 试验情况
设备自检时“外/内100M”打到内100M,外接外触发,打开电源,调节延时和脉宽,旋转黑色旋钮D7可调节手动水柱信号大小,旋转D6可调节自动水柱信号大小。图3给出了 “S1S2…S11”为“11111111111”及“S1S2…S11”为 “01111111111”时设备产生的手动水柱信号延时实测值,分别为40.96μs和20.48μs。图4为“S12S13”为“00”及“S12S13”为“11”时设备产生的手动水柱信号宽度实测值,分别为196ns和496ns。自动水柱信号实际上为手动水柱信号和杂波信号的耦合,在雷达调试中杂波信号往往很小,自动水柱信号与手动水柱信号的延时和宽度图仅仅体现在波形基底上,实测值与图4类似。雷达进行模拟水柱检测时“外/内100M”打到“外100M”,将手动水柱信号或自动水柱信号接入雷达中频接收机,设置操控台参数,观察水柱信号的数量和距离。在二种模拟水柱测量模式下我们观察到了水柱数量和距离信息,达到了预期的结果。

图3 手动水柱信号延时实测图
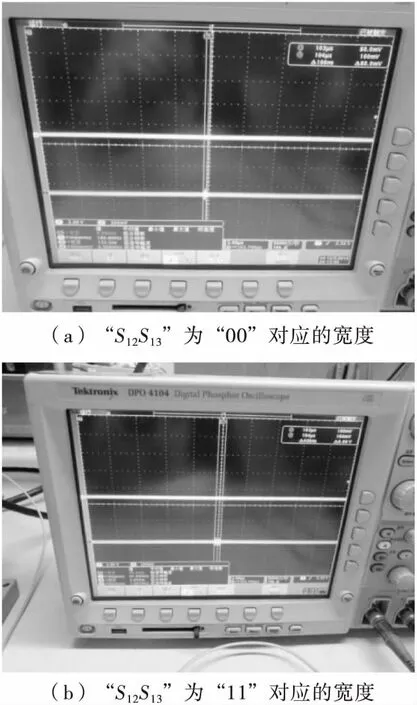
图4 手动水柱信号宽度实测图
6 结束语
本文结合工作实际设计了一种模拟水柱信号发生器,详细介绍了设备的设计原理和使用方法,可替代传统模拟水柱信号测量时仪表繁多、耗时耗力、操作复杂等缺点,节约了雷达的调试成本。该设备模拟产生了手动水柱信号和自动水柱信号,分别送入跟踪雷达中频接收机中,跟踪雷达操控台上在对海水柱测量模式下均成功检测到了二种水柱信号的数量和距离信息,取得了预期的结果。该设备具有体积小、携带方便、操作简单、集成度高等优点,在雷达调试和系统联调时可作为自检设备检查雷达的工作状态,有一定的推广性。
猜你喜欢
小哥白尼(野生动物)(2021年4期)2021-07-29
家庭影院技术(2021年5期)2021-07-21
小哥白尼·野生动物画报(2021年4期)2021-07-13
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
新作文·小学低年级版(2020年6期)2020-07-09
雷达与对抗(2020年1期)2020-06-05
发明与创新·中学生(2017年1期)2017-01-20
世界汽车(2016年8期)2016-09-28
