机器人瞬态平稳控制系统研究
2019-08-26 01:20周嘉玉李泽郝万君
山东工业技术 2019年22期
周嘉玉 李泽 郝万君
摘 要:本文主要利用自适应模糊PID的控制方法设计了一个基于单片机的机器人瞬态平稳系统,以智能小车为模型,介绍了系统的主要结构,包括中央控制模块,传感器模块,执行器驱动模块。红外避障传感器实时检测路况信息,当小车与障碍物的距离小于设定值时,单片机驱动电机动作。自适应模糊PID控制比起常规PID控制能够更好地控制复杂的、时变的非线性控制系统。仿真和实物实验结果表明,本系统具有很好的动态性能,大体实现了瞬态平稳的目标。
关键词:瞬态平稳;STM32;自适应模糊PID
DOI:10.16640/j.cnki.37-1222/t.2019.22.104
1 引言
随着科学技术的发展和进步,智能服务机器人在人们日常生活和工作中扮演的角色越来越重要,尤其是在当今老龄化人口比较多的时代,它不仅能够承担起照顾老人的责任,还能不断满足现代年轻人多样化的需求[1]。家居服务机器人的重要基础功能之一是在室内环境下的平稳快速移动,例如面向行动不便的老人、卧床休息的病人以及忙碌的主人,提供端茶端水、传递药品、运送饭菜等功能。由于机器人快速移动过程中的急起急停,可能会导致液体洒落、物品滑落等问题,所以研究机器人的瞬态稳定问题具有重要意义。
2 机器人瞬态平稳控制系统总体设计方案
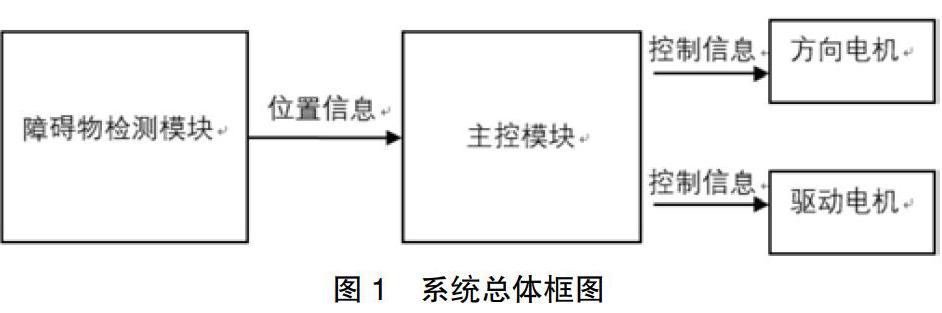
本设计方案如图1所示。
2.1 主控芯片
本設计采用STM32单片机作为主控芯片,STM32便于扩展同时外设和软件具有高度兼容性[2]。主控芯片接收并处理传感器采集的信息,根据周围的路况来发出指令到执行器件,使之做出相应的动作。若传感器检测到前方有障碍物,那么主控单元发出指令,驱动电机先减速,再停止,最后左转,从而实现避障的功能。
2.2 障碍物检测模块
红外避障传感器由一对发射管和接收管组成,当发射管发出的红外信号经过障碍物反射回接收管时,前方无障碍物的话输出高电平,有障碍物的话则输出电平会从高电平变成低电平。传感器检测到这个信号就可以判断出正前方有无障碍物,并把信号传送给单片机,单片机控制小车两轮工作,从而完成避障的功能[3]。
2.3 步进电机
本设计选用前后两个步进电机用做为机器人的执行器件,前一个电机控制前轮,用于控制机器人运动的方向;后一个电机用于控制后轮,用于提供机器人运动的动力。
3 硬件设计
电路按照作用分为中央控制单元电路、传感器采集单元电路、执行器单元电路以及其它相关功能单元电路。
3.1 中央控制单元电路
本系统采用STM32作为中央控制单元,STM32包括时钟电路、复位电路、电源电路和下载电路。在晶振两端分别加上一个电容,无极性的电容可以滤去晶振两端的高频杂波。只有保证晶振电路稳定,单片机才能继续工作STM32通常为低电平复位,通过一个按键及电容电阻所组成,利用按键的开关功能实现复位。当开关按下时,NRST引脚与地导通,即输入一个低电平,从而实现复位的功能。采用两节3.7V干电池18650供电,STM32的工作电压为2.0-3.6 V。
3.2 红外避障模块
红外避障传感器利用了被检测物对发射红外光的反射或遮挡的原理,经过光电回路选通电路,从而判断有没有障碍物[4]。LM393是双电压比较器集成电路,其输出负载电阻能连接在可允许电源电压范围内的任何电源电压上,而不受 Vcc端电压值的影响。 红外发射信号遇到障碍物后反射, LM393的2、3引脚两端进行电压比较,从而3引脚收到电压信号与2号引脚上的电压比较,所以调节电位器的大小可以决定红外避障模块的灵敏度。 两个端子上的电压经过比较后,小车再决定动作与否。
3.3 电机驱动电路
本部分将使用步进电机作为执行器件,作用是执行主控芯片发送的指令。单片机发送一个电脉冲信号,那么步进电机就转过一个固定的角度,即一个步距角。因此控制电脉冲的个数就可以控制步进电机的角位移,若控制电脉冲信号的发送频率的话,就可以控制电机的转速,而ULN3003是使用非常广泛的电机驱动芯片。
4 控制方案设计
机器人的运动控制系统很明显是模型复杂的非线性系统,但是常规PID控制器对于复杂系统的控制效果不好。模糊控制却能控制复杂的时变非线性系统,但没有积分环节的原因,系统的稳态误差不能消除。模糊系统的卓越特性:一方面,模糊系统是由一个实值向量向一个实值标量所作的多输入单输出映射;另一方面,模糊系统是由来自于以模糊IF-THEN规则为形式的人类知识所组成的基于知识的系统[5]。所以本设计考虑将常规PID控制器和模糊控制的方法结合起来组成自适应模糊PID控制器应用于本设计的家居服务机器人瞬态平稳控制系统。
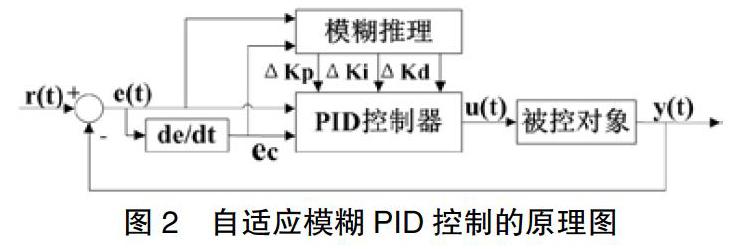
自适应模糊PID控制的原理如图2所示。图中,输入变量r(t)为人为的一个预设值,与实际值输出变量y(t)产生一个偏差,即误差。误差及误差变化率经模糊推理,采用自适应的方法、根据模糊矩阵表,对于PID控制器的三个控制参数进行整定。
通过建立的模糊推理规则实时对Kp,Ki 和Kd 进行整定,设计出模糊自适应PID 控制器[6]。模糊控制器是自适应模糊 PID控制的核心,其原理是把偏差信号 e和偏差变化率 ec送入模糊控制器,模糊控制器进行模糊化、推理,然后求解,把得出的参数Δ kp、Δ ki、Δ kd分别输入 PID控制器[7]。模糊整定PID控制参数就是利用模糊推理的方法找出PID控制参数与输入变量之间的关系,根据不断变化的情况修正控制参数。
解模糊化过程如下:系统根据模糊化输入激活相应的规则,输出的模糊语言值的隶属度是根据规则前件及蕴涵都使用“取小”的操作进行运算,后采用重心法求出模糊控制输出值。
5 仿真
利用仿真工具对控制系统进行设计与仿真,可以有效地对比各种控制模型与方案,选取并优化相关控制参数,从而对整个控制系统的性能进行优化与提高,尤其是对于一些新型控制理论与算法的研究,进行系统仿真更是必不可少的[8]。系统的仿真与调试主要针对模糊PID控制进行了Simulink仿真,与普通的PID控制方法进行了对比,还进行了实物实验,组装了一个基于STM32的红外避障小车。红外避障小车可以实现前进、后退、转弯和避障的功能,然而本设计的最主要的控制要求就是瞬态平稳,智能小车也可以做到,将通过仿真来验证控制算法的可靠性。
图3为自适应模糊PID控制系统仿真图,图4为阶跃响应曲线对比。图中蓝色曲线为阶跃信号,红色曲线为模糊PID控制对单位阶跃的响应曲线,橙色曲线为常规PID控制对单位阶跃的响应曲线。从图中可以看出模糊PID控制达到稳态的时间在1秒以内,而常规PID控制的稳态时间大约为5.5秒。由此可见模糊PID控制的控制效果比常规PID控制的控制效果好。其他控制性能由实验验证。通过在小车上进行实验,如图5所示,智能小车上安装了红外避障模块以及超声波传感器,采用干电池供电,小车自由旋转、前进后退,没有急停、急走的情况,基本达到预期目标。
6 结论
本设计选取了智能车代替机器人进行实物验证,从仿真验证和实物实验,都基本达到预期目标。然而在实际应用中难免与真实情况有所出入,当今国际上对于科学技术的研究都向精细化发展,所以本设计的应用前景也将十分广阔。
参考文献:
[1]刘焕海.基于云架构的智能家居机器人系统研究[J].自动化与仪器仪表,2018(04):55-57.
[2]涂颖,李刚.基于STM32智能门禁控制设计[J].电子电路设计与方案,2018(08):5-8.
[3]郭宏亮,赵瑜会,李名伟,于婷婷.基于BLDCM的智能播种控制系统设计[J].农机化研究,2019(02):201-205.
[4]史烨桦,汪地,万兵,孙玲玲.基于Arduino多传感器的智能小车避障系统设计[J].计量与测试技术,2018(09):16-19.
[5]王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003:4.
[6]马宏斌,毕建兴,赵家莹.基于单片机的智能小车避障系统的设计与实现[J].信息记录材料,2018(10):77-79.
[7]周克良,韩李珂,胡梁眉.基于自适应神经网络模糊PID的PTFE电缆线径控制系统[J].工程塑料应用,2018(11):78-83.
[8]王一帆,石中锁.自适应模糊PID控制器及其MATLAB仿真[J].冶金自动化,2007:499-502.
論文受到2019年度苏州科技大学高水平毕业设计(论文)培育(团队)项目资助(项目编号2019TGB-02)。
作者简介:周嘉玉(1997-),女,江苏盐城人,本科,研究方向:智能控制、复杂系统控制与滤波。
*为通讯作者