基于滑模观测器的船用永磁推进电机位置辨识研究
2019-08-22 09:17何忠祥李成阳贾志强
船电技术 2019年8期
何忠祥,黎 曙,李成阳,贾志强
基于滑模观测器的船用永磁推进电机位置辨识研究
何忠祥,黎 曙,李成阳,贾志强
(武汉船用电力推进装置研究所,武汉 430064)
针对传统滑模观测器永磁同步电机转子位置辨识存在特征频次交流扰动的问题,分析了开关管死区效应、导通压降和电流采样调理精度等非理想逆变对辨识反电动势和转子位置的影响,提出了一种基于内嵌陷波器的同步旋转坐标系锁相环技术,抑制了辨识反电动势中特征频次扰动信号对转子位置辨识值的影响,并给出了新型锁相环参数选择确定的原则和依据。仿真结果表明该算法可以有效削弱逆变非理想特性对转子位置辨识结果的影响,验证了本文理论分析的正确性和所提策略的有效性。
永磁同步电机 无位置传感器 滑模观测器 非理想逆变 陷波器
0 引言
随着稀土永磁材料剩磁性能的提高和自动控制技术的发展,永磁推进电机以其功率因数高、调速范围宽等优点在船用电力推进领域的应用日益广泛。为满足高性能控制的要求,无论采用矢量控制还是直接转矩控制都需要得到转子位置信息。在船舶高湿度、高振动、高盐雾的恶劣条件下,采用机械式位置传感器会降低推进系统的可靠性,增加系统成本;因此,适用于永磁同步电机的无机械式位置传感器控制技术得到日益广泛的关注[1]。
根据转子位置和反电动势、定子磁链等电磁状态量之间的关系,众多学者提出了一系列的位置辨识策略。电机中高速工况运行时,基于滑模状态观测器的位置辨识策略以其动静态特性好、抗参数摄动能力强的优点应用广泛。根据永磁同步电机静止两相坐标系下基频数学模型,文献[2]-[3]以电流为观测量,构建了二阶滑模观测器模型,文献[4]-[5]通过引入有效磁链和有效反电动势,以电流和反电动势为观测量,建立了四阶混合滑模观测器模型;无论采用哪种滑模观测器模型,最终都是利用反正切函数或者锁相环从辨识反电动势中提取出位置信息。虽然滑模观测器有较好的鲁棒特性,但位置辨识效果仍受电机参数偏差、死区效应和相电流谐波分量等因素的影响,目前针对滑模变结构位置辨识策略的研究主要集中在滑动模态高频抖振信号的抑制和转子位置信息的提取上,鲜有涉及位置辨识偏差的研究分析。
针对本文研究对象船用永磁同步电机,利用饱和函数和锁相环技术,本文给出了一种二阶滑模观测器位置辨识算法。详细分析了逆变开关管死区效应、开关管导通压降和电机相电流非理想采样对辨识反电动势和位置辨识偏差的影响。在此基础上,提出了基于内嵌陷波器的新型锁相环算法,给出了该算法参数选择确定的依据;该算法消除了位置辨识偏差中的特征谐波分量,并且增强了对滑动模态高频抖振信号的抑制。最后通过仿真验证了本文理论分析的正确性和所提策略的有效性。
1 滑模变结构位置辨识模型
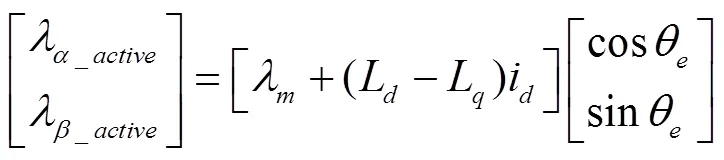
静止两相坐标系下,永磁同步电机转子磁链可以用下式所示:

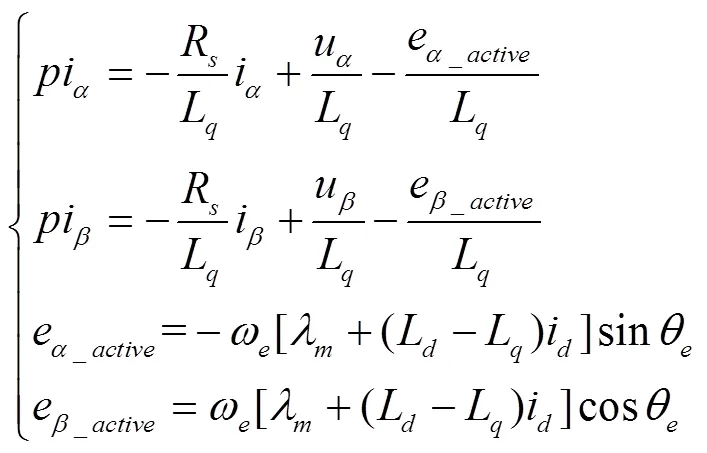
可以建立二阶滑模变结构状态观测器:


为抑制滑模观测中的高频抖振信号和降低锁相环参数设计的难度,本文采用基于内嵌低通滤波器的同步旋转坐标系锁相环技术获得转子转速和位置信息,如图1所示。
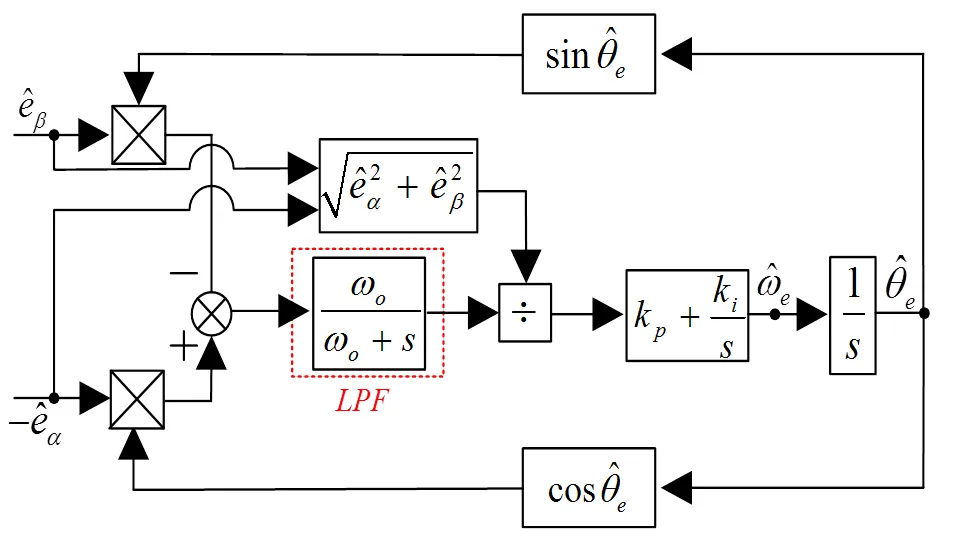
图1 新型位置提取单元原理框图
2 非理想特性对位置辨识影响
1) 电压偏差影响分析
忽略零电流钳位效应影响,根据冲量守恒定律,逆变开关管平均误差电压表示为:




滑模观测器输出稳定时,可得:
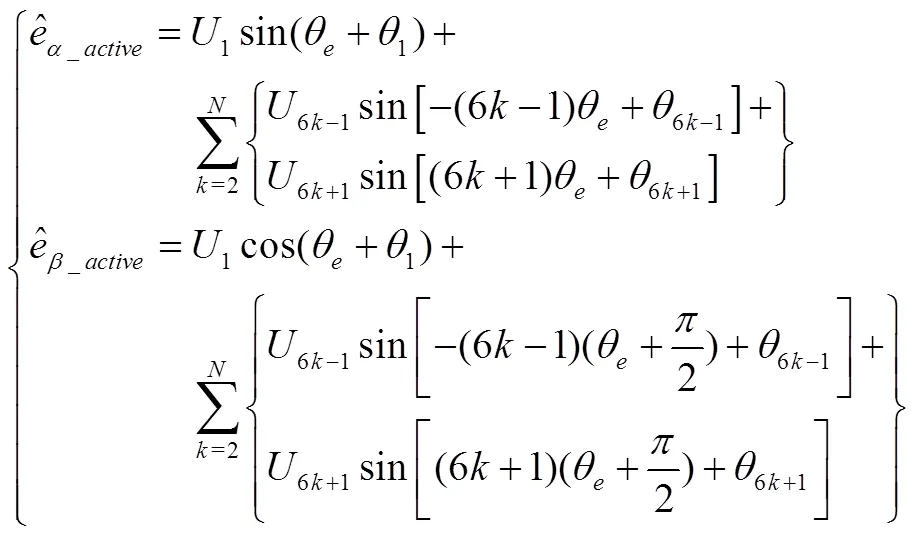
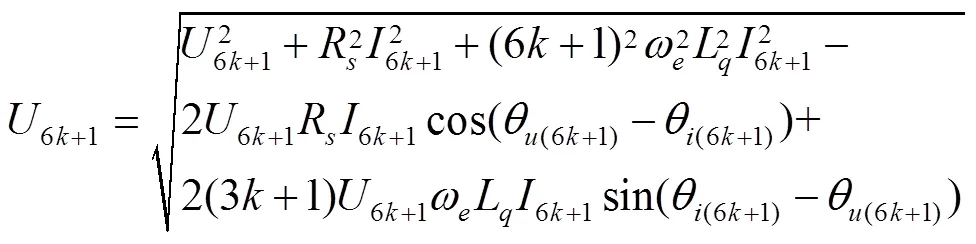
其中:

2)电流偏差影响分析

3 内嵌陷波器的锁相环算法
为抑制转速辨识和位置辨识偏差中的谐波分量,本文采用一种新型陷波器替代图1中的低通滤波器(LPF),该陷波器在保证对滑动模态高频“抖动”信号抑制的前提下,还能消除位置辨识偏差中特征频次的低频谐波分量。
本文提出的内嵌陷波器传递函数为:


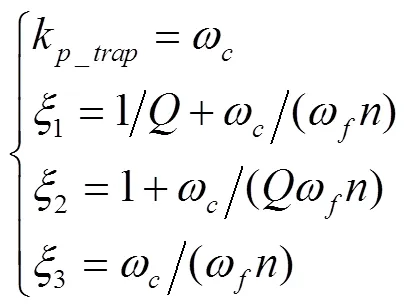
品质因数越大,陷波器窄带滤波效果越好,性能越佳;但对频率变化的敏感性也越强,因此,品质因数的确定需要根据电机频率波动范围和窄带滤波效果综合考虑,本文选择=0.707。
影响位置辨识偏差的通常是低阶特征频率分量,通过对转速辨识值进行频谱分析获得需要抑制的谐波成分。本文提出的基于内嵌陷波器的新型锁相环和传统锁相环幅频响应特性如图2所示。
对比传统锁相环算法,新型锁相环算法在对低频输入信号保持高增益的前提下,对高频噪声信号有更强的抑制作用,并且能够吸收输入信号中特定频率扰动分量;需要强调的是,内嵌陷波器恶化了高频分量相位滞后的情况,降低了响应速度,减小了稳态裕度,设计时需要特别注意。
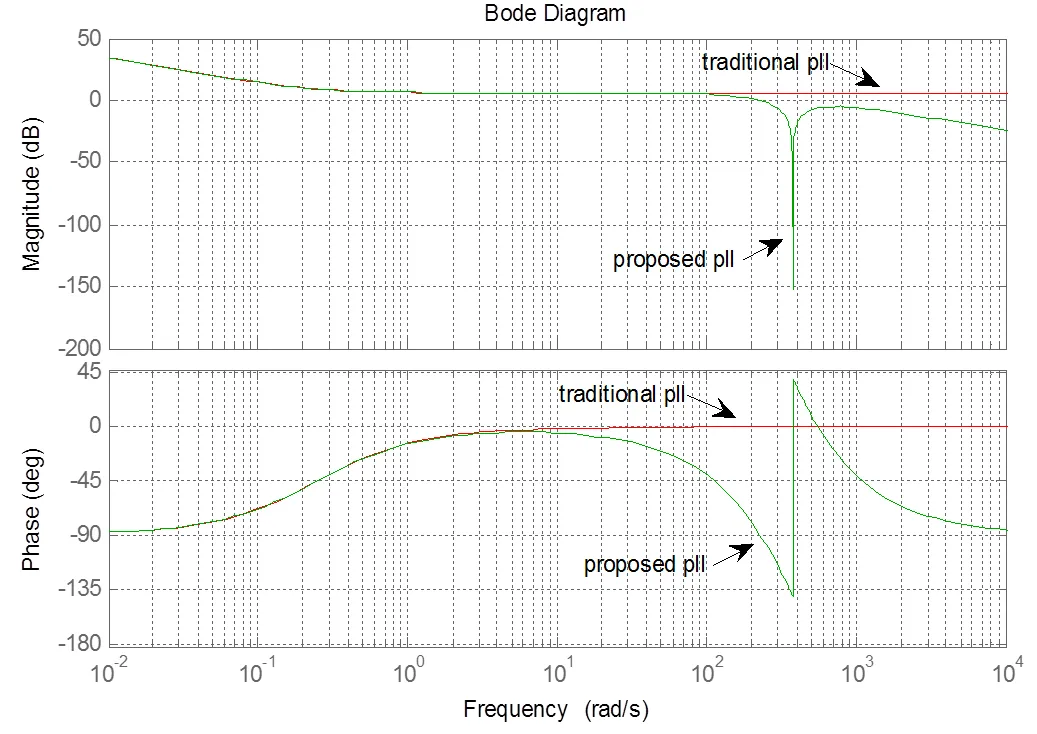
图2 锁相环波特图对比
4 仿真和分析
为验证本文理论分析的正确性和所提策略的有效性,运用Matlab/Simulink建立了船用永磁同步电机位置辨识模型。该电机额定电压为400 V,额定电流为430 A,额定转速为120 r/min,极对数为20,定子电阻为0.011Ω,交直轴电感为2.3 mH。验证时设置开关管死区为2 μs,导通压降为2 V;为模拟非理想采样电路,A相电流采样比例系数设为1.02,B相电流采样比例系数为0.98。
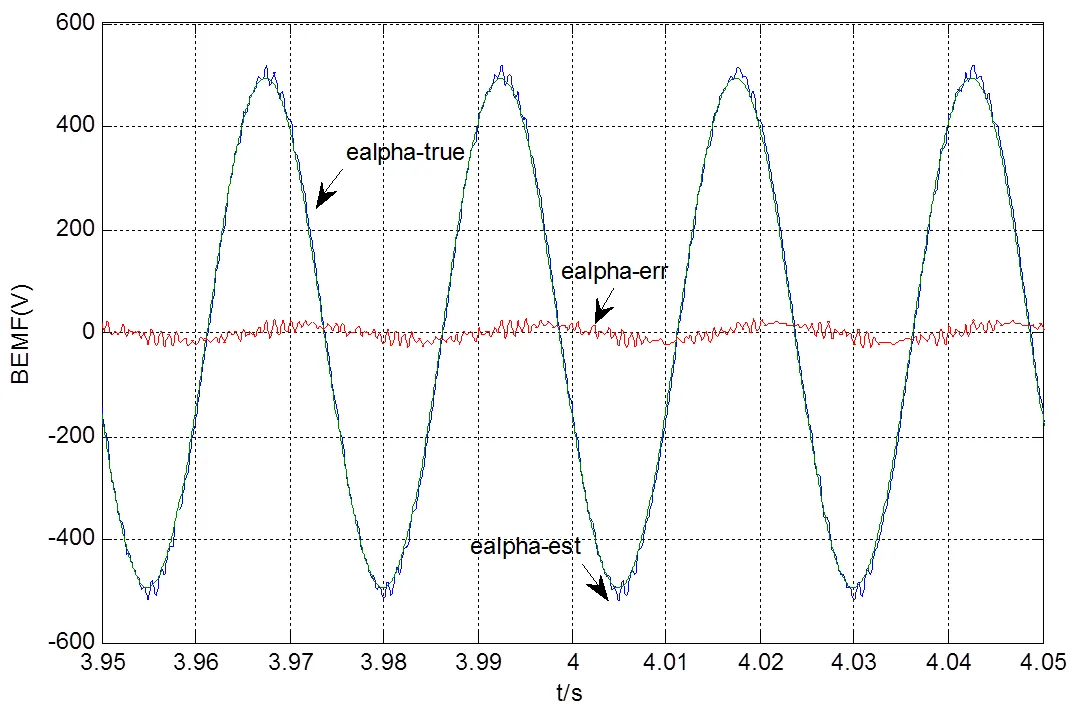
图3 辨识有效反电动势对比图


图4 位置辨识效果示意图图

图5 新型锁相环位置辨识偏差对比图

图6 新型锁相环转速辨识偏差对比图
5 结论
本文在传统基于二阶滑模状态观测器和锁相环位置辨识算法的基础上,分析了开关管死区效应、导通压降和电流采样调理精度等逆变非理想特性对位置辨识结果的影响,进而根据陷波器原理,构造了一种新型同步旋转坐标系锁相环算法,最后进行了仿真验证。本文结果表明:
1)开关管死区效应和导通压降使得电机绕组电压实际值和给定值之间出现偏差,辨识有效反电动势中含有6+1 次谐波分量,经过锁相环外差法运算后,位置辨识中存在6次谐波分量;
2)电流采样调理偏差使得辨识有效反电动势中含有低次谐波,位置辨识中一般会出现2倍频谐波分量;
3)基于陷波器的新型锁相环技术可以削弱辨识反电动势中谐波分量对位置辨识结果的影响。
[1] Mohammad S Islam, Iqbal Husain, Robert J Veillette, et al. Design ang performance analysis of sliding mode observers for sensorless operation of switched reluctance motors[J]. IEEE Trans. on Control systems technology, 2003, 11(3): 383-389.
[2] H. Zhongxiang, Z. Lei, et al. Rotor position estimation based on modified sliding mode observer for sensorless permanent magnet synchronous motor, 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, 2017: 1-6.
[3] 鲁文其, 胡育文, 杜栩杨等. 永磁同步电机新型滑模观测器无位置传感器矢量控制调速系统[J]. 中国电机工程学报, 2010, 30(33): 78-83.
[4] Gaolin Wang, Zhuomin Li, et al. Quadrature PLL-Based High-Order Sliding Mode Observer for IPMSM Sensorless Control with Online MTPA Control Strategy, IEEE Transactions on Energy Conversion, 2013, 28(1): 214-224..
[5] 苏健勇, 李铁才, 杨贵杰. 基于四阶混合滑模观测器的永磁同步电机无位置传感器控制[J]. 中国电机工程学报, 2009, 29(24): 98-103.
Rotor Position Estimation Based on Sliding Mode Observer for Marine Permanent Magnet Propulsion Motor
He Zhongxiang, Li Zhengguang, Zhu Lei
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM351
A
1003-4862(2019)08-0015-05
2019-2-20
何忠祥(1991-),男,工程师。研究方向:电力电子与电力传动。E-mail:237632488@qq.com
猜你喜欢
微电机(2022年8期)2022-10-12
通信技术(2020年12期)2020-12-23
电动工具(2020年4期)2020-08-20
郑州大学学报(工学版)(2020年2期)2020-06-16
物探与化探(2020年2期)2020-04-21
无线电工程(2020年4期)2020-04-02
电子制作(2019年15期)2019-08-27
汽车电器(2019年2期)2019-03-22
科教导刊·电子版(2017年16期)2017-07-21
舰船电子工程(2014年3期)2014-11-23