
无人机地面站的冗余设计与可靠性
2019-08-22 07:27:14肖光华
电子技术与软件工程 2019年12期
文/肖光华
当前无人机发展如火如荼,在军事领域和民用领域具有广泛的应用需求。无人机地面站作为整个无人机系统的重要组成部分,有无人机“神经中枢”之称,通过它主要完成对无人机平台、数据链、机载任务设备的控制,并实现对全系统的监控功能。无人机地面站的可靠性直接影响无人机的飞行安全和执行任务的成功率,因此要求无人机地面站的工作具备连续、稳定和可靠等特点。采用冗余设计是提高无人机地面控制站任务可靠性的有效途径。
1 无人机地面站组成及功能
无人机地面站根据使用场所和外形尺寸一般分为固定塔台式、车载式和便携式三大类,各类无人机地面站的典型组成基本一致,组成框图如图1所示。一般包括操作手控制器、1 套或多套显控台、中央处理单元和测控地面终端(GDT),这些设备构成的系统是无人机地面站的关键系统,负责完成飞行监控、任务载荷监控、任务规划、链路监控等功能。固定塔台式和车载式一般还包括环空系统和供配电系统,另外根据需求可能还包括语言通话设备、与后方指挥中心通信设备等。其中操作手控制器主要用于人工控制无人机起降和飞行,显控台用于发出飞行、链路、任务控制指令以及处理和显示飞行参数、链路信息和任务载荷信息,中央处理单元主要用于上行遥控数据处理和组帧、行数据的分发以及系统状态管理。GDT 和测控机载终端(ADT)组成测控系统完成对无人机平台的遥控、遥测、信息传输和跟踪定位。
2 冗余设计原则
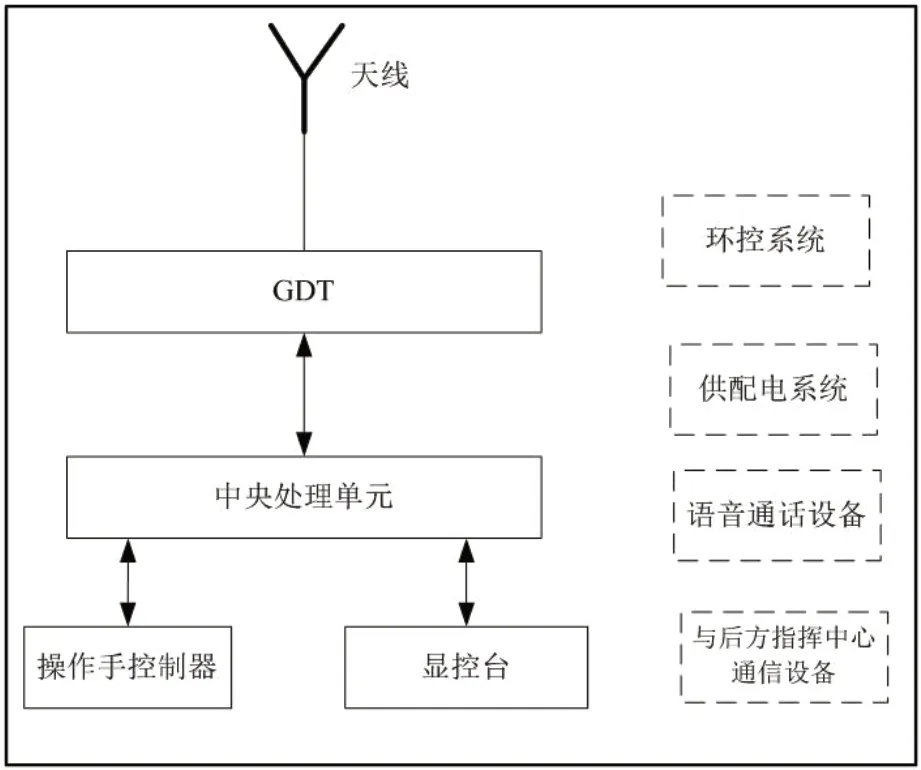
图1:无人机地面站的典型组成框图
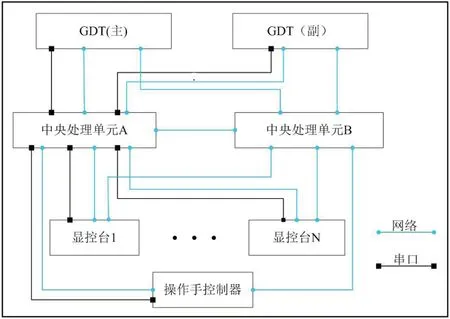
图2:无人机地面站关键系统的冗余设计框图
冗余设计技术是在费用、重量、体积等因素的限制条件下,通过配置冗余单元,使系统可靠性达到最大。需要注意的是,虽然冗余设计能提高系统的任务可靠性,但也使故障点增多,降低了系统的基本可靠性(MTBF),同时导致质量、体积、复杂度和成本等成倍地增加,以及设计、制造、装配和试验时间的延长。因此,在进行冗余设计前,不仅需要对将获得的效益与所付出的代价进行仔细地分析、比较,而且需要收集大量的相关试验数据进行详细分析,并进行必要的可靠性分析,以便评估采用什么样的冗余方式是最有效的。通常情况下,有效的冗余设计不仅能够提高系统的任务可靠性,而且能够降低费用,是一种用来弥补低任务可靠性的效费比较高的途径。所以必须确定使用什么样的冗余是最有效的方式,在使用冗余设计前应全面考虑其优点及不足。冗余具有多种不同的方式:并联冗余、表决冗余、串并组合冗余、非工作冗余,在无人机地面站的关键系统设计中四种冗余设计方式均有采用。
3 无人机地面站冗余设计
无人机地面站关键系统的设计框图如图2所示,通过设备冗余、接口冗余、软件冗余和数据冗余等多个方面设计,以提高系统的任务可靠性。
3.1 设备冗余设计
在地面控制站组成中,操作手控制器、显控台、中央处理单元和测控地面终端设备是关键设备,对这些关键设备进行冗余备份是提供系统任务可靠性的重要途径。
根据实际需求,热冗余备份设计一个或多个显控台,为保证显控台之间功能可完全备份,所有显控台的软硬件完成一致。不因软硬件组成差异区分为飞行监控台、载荷监控台和链路监控台等,可根据机组人员组成、任务特点以及地面站状态等把任意一个显控台定义为飞行监控台、载荷监控台或链路监控台,保证最大效能地完成任务。
中央处理单元是无人机地面站的数据交互中心,综合考虑成本和系统设计复杂度,热备份设计一台中央处理单元,两个中央处理单元的软硬件组成完全一致。当中央处理单元A故障时,可自动或人工把中央处理单元B 切换为主设备,保证工作的连续性。

表1:各单元工作2000h 的可靠度

表2:最小割集及不可靠度
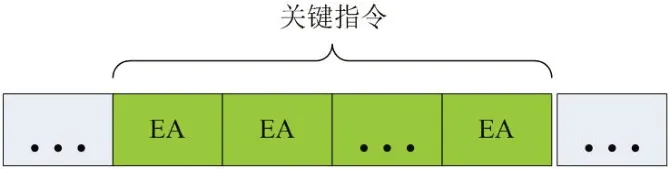
图3:关键指令表决冗余设计示例

图4:数据帧多级校验冗余设计示例

图5:冗余设计前任务可靠性框图
为保证地面站与机上的无线通信的可靠性,设计主链GDT 和副链GDT,主链可选择宽带数据链,如Ku、C 或L 波段数据链,用于传输飞行遥控遥测数据、下传宽带载荷数据以及实现对无人机跟踪和测距功能。副链作为热备份数据链,一般选择成本较低的窄带数据链,如UHF 波段等数据链,窄带数据链由于带宽限制只能传输飞行遥控遥测数据。正常工作时,地面站通过主数据链实现对无人机平台的监控以及载荷数据传输,当主数据链异常时,地面站可通过副链实现对无人机平台的监控,保证无人机的飞行安全。
考虑到一个无人机机组中一般只配置一个飞行操作手,以及人工操纵的实时性特点,对操作手控制器进行备份配置的意义不大,所以操作手控制器不进行冗余备份配置。
3.2 接口冗余设计
地面站内的信号接口类型主要为以太网口和RS422 串口。操作手控制器、所有显控台和主副测控地面终端均通过以太网口与中央处理单元A、B 连接,另外操作手控制器、所有显控台和主副测控地面终端均通过RS422串口与中央处理单元A。当中央处理单元A设置为主设备时,优先接收和处理网络通道数据,与其交联的设备优先接收处理中央处理单元A 通过网络通道发送的数据,当中央处理单元A 与某设备间的网络通信异常时,则切换至串口通道实现数据收发。为降低系统复杂度,中央处理单元B 与其他设备间不备份串口连接。
3.3 软件冗余设计
对地面站内的关键软件和功能模块进行软件冗余设计是提高地面站可靠性的有效途径。
3.3.1 关键软件冗余设计
地面站内在显控台上运行的飞行监控软件、链路监控软件、载荷监控软件是保证无人机飞行安全、任务正常执行的关键软件,这些软件可在任意一台显控台上布置启动,并通过设置执行相应的功能。在综合中央处理单元中运行的数据协议处理软件等是整个地面站的核心软件,可以在中央处理单元A 和B 上无差别的运行,相互间进行冗余热备份。
3.3.2 关键功能软件冗余设计
显控台上一般会通过设计机械按键键盘或可编程触摸按键来产生遥控指令,这样指令都是控制飞行和任务设备的关键指令,为保证机械按键键盘或可编程触摸按键失效后不影响飞行安全、任务正常执行,在飞行监控软件、任务监控软件等软件界面上冗余设计软指令键盘。
3.4 数据冗余设计
数据冗余设计是从控制站内部或控制站与机载平台之间的通信协议层面进行冗余设计。对于数据帧中影响飞行安全的遥控指令、遥调指令等进行多字节冗余组帧发送,如图3所示,如一个编码EA 的遥控指令,在一包上行遥控数据帧连续发送N 字节(一般N 取3~5),接收端设备或机上在接收到的数据帧中对该指令采用“N 判N-1”原则,判断该遥控指令的有效性,确保这些关键指令可靠执行,这是表决冗余设计思想。
为了保证数据通信的可靠性,一般会对数据帧加校验进行保护,为了保证关键数据的传输的可靠性,地面站中对上行遥控数据的关键数据区再进行独立的校验,增加一级校验保护,如图4所示,图中“23”为关键数据区的独立校验位,“C9 08”为整个数据帧的校验位,数据帧校验可采用较为复杂的算法。通过两级校验保证关键数据的在传输过程中的正确性。
4 可靠性分析
下面对无人机地面站关键系统进行冗余设计前后的可靠性进行分析和比较。因数据冗余设计后的可靠性不便进行分析,所以只对开展设备冗余、接口冗余和软件冗余设计后执行某一任务可靠性进行分析。
这里选取执行”地面站发送飞行遥控指令”这一任务的可靠性进行分析比较。在进行冗余设计前任务可靠性框图如图5所示,进行余度设计后的任务可靠性框图6所示
一般系统所包含单元的故障时间服从指数分布,则可靠度与平均故障间隔时间(MTBF)和时间(t)的关系如下:

根据公式(1)和各单元的MTBF 计算得出各单元的2000h 的可靠度如表1所示。
冗余设计前任务可靠性框图为简单的串联模型,求得执行以上任务关键系统2000h 可靠度为
0.9137×0.8346×0.8931×0.8187×0.7866 = 0.5357。
由于冗余设计后网络系统可靠性框图复杂,为了便于定量计算执行以上任务该系统的可靠度,这里采用简化最小割集法估算系统的可靠度。
简化最小割集法的原理是以串-并联系统替代网络系统,该方法是将所有的最小割集作为并联单元,再将这些并单元串联起来,构成一个串-并联系统来计算系统的可靠度。在已知最小割集的情况下,系统可靠度由式(1)近似求得。

式中:
Rs——整个系统的可靠度;
m——最小割集的数量;
ci——第i 个最小割集;
Rn——第n 个单元的可靠度;
Fi——第i 个最小割集的不可靠度。
对图中显控台上相关软硬件可靠性框图进行并串合并,并对合并后可靠性框图中的单元进行编号,如图7所示,经分析该系统的最小割集有17 个,各最小割集及经计算后的不可靠度如表2所示。
把表2中数据带入公式(2)可得,冗余设计后系统2000h 可靠度Rs ≥0.8428。
由此可见,地面控制站紧冗余设计后,执行以上任务,关键系统2000h 可靠度可以得到提升,即关键系统的任务可靠性得到了很大提高。
5 结束语
无人机地面站的可靠性关系到飞行安全和任务执行的成功率,通过有效的冗余设计可大幅提高无人机地面站的任务可靠性。本文提出的无人机地面站关键系统冗余设计架构和冗余设计方法已应用于无人机地面站实际工程设计中,任务可靠性得到了明显提高。
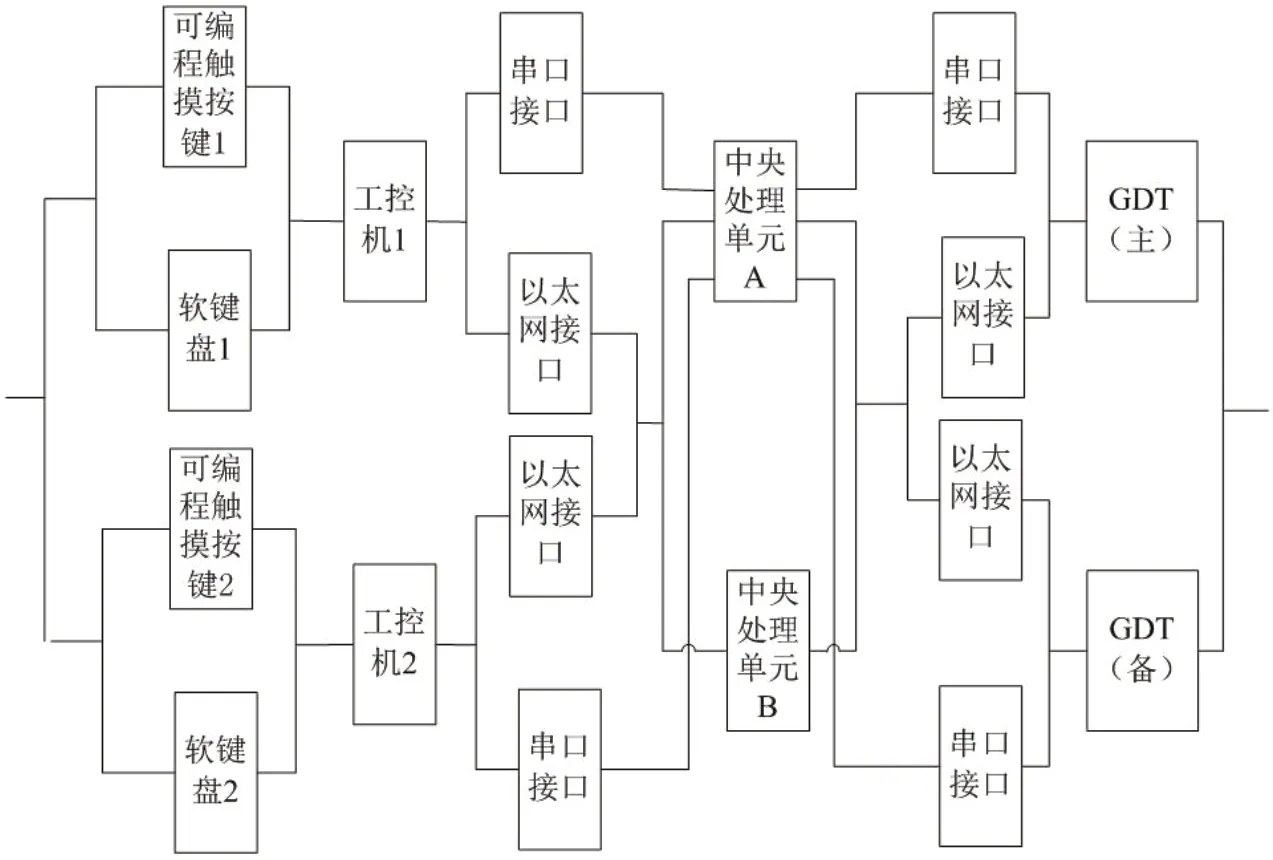
图6:冗余设计后任务可靠性框图
猜你喜欢
净水技术(2022年1期)2022-01-13 00:45:28
中学生数理化(高中版.高考理化)(2021年6期)2021-07-28 06:21:04
科技资讯(2021年10期)2021-07-28 04:04:53
环境卫生工程(2021年3期)2021-07-21 05:34:36
广东通信技术(2020年7期)2020-08-13 06:01:42
汽车维修技师(2019年7期)2020-01-16 04:33:04
汽车维修技师(2018年11期)2018-05-11 02:38:32
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
新高考·高一物理(2014年4期)2014-09-17 06:52:02
NBA特刊(2014年7期)2014-04-29 00:44:03
