
一种基于集体检测理论的GPS直接位置估计实现方法*
2019-08-20 08:07:24陈万通汪竹青
航天控制 2019年3期
陈万通 汪竹青 刘 庆
1.中国民航大学 天津市智能信号与图像处理重点实验室, 天津300300 2.上海航天电子技术研究所, 上海201109
由于全球导航卫星系统(GNSS)具有全球性、全天候和连续的精密三维定位能力,因此近十余年,以GPS和北斗为代表的卫星导航定位系统已经广泛应用到各种领域。经典的导航信号处理方法通过捕获、跟踪实时获取多颗卫星的伪距测量,进而计算用户位置。这种方法本质上是基于“伪距域”的处理策略,各个卫星信号独立跟踪的架构使得不同卫星的信号处理完全分离,多通道信号之间基于接收机同一位置和速度的相关性被完全忽略,并且未能成功捕获的卫星弱信号不能有效参与到定位解算中,因此没有实现所有信息的最佳利用[1]。国外学者理论证明,基于“导航域”的直接位置估计可以实现导航参数的最优估计,但由于目标函数异常复杂[2],导致其解析解的直接估计难以快速完成,制约了其实际应用。近年来,基于集体检测理论的矢量信号处理方法被提出[3],作为一种导航信号处理的新策略,该方法利用了多通道信号之间基于接收机同一位置的相关性实现GNSS信号的矢量跟踪[4]。同时,集体检测理论将各卫星信号的相关能量直接投射在导航域[5],依据极大似然准则进行直接位置估计,与信号是否成功捕获和跟踪无关,尤其适用于弱信号等环境下的导航定位,对于新一代高性能卫星导航终端的研制具有重要意义[6]。目前,该方法主要处于理论研究阶段,其难点在于利用高效的搜索策略解决该问题庞大的计算量[7-8]。
基于集体检测理论,提出了一种GPS直接位置估计方法的具体实施策略,并基于真实GPS信号验证了算法在弱信号处理的实际性能,对于新一代导航接收机的研制具有重要参考意义。
1 直接位置估计理论
为了便于阐述,首先对接收机导航信号处理进行数学建模。
1.1 信号模型
假定x(t)为带限连续时间信号;w(t)为观测噪声,采样间隔为Ts;可见星数目为M;则GPS离散时间信号可以表示为
(1)
其中,xi[n]是第i颗星的有用信号,可建模为
(2)
其中,信号参数(ai,τi,fi)是时变的,对于低动态用户,在很短的观测周期内,可近似认为恒定。
1.2 极大似然估计
假定观测噪声是零均值高斯白噪声,则所有卫星信号待估参数的联合极大似然估计等效为如下最小二乘参数估计问题:
(3)

(4)
注意到参数τi和fi与用户的位置矢量r和速度矢量v存在如下函数关系:
(5)
(6)
其中,c是光速;fc是载波频率。基于式(5)和(6)可以证明,式(4)等价为
(7)
上述函数当且仅当待估参数等于真实位置和真实速度时取得全局最大。
2 基于集体检测理论的直接位置估计
2.1 集体检测理论
直接位置估计理论建立了信号与用户位置的直接联系,但是式(7)较为复杂,直接求解十分困难。集体检测理论于2011年正式提出[3],其思想是将全部卫星的相关信号能量直接投射到导航域,理论上,所有卫星在真实位置上累积的相关能量最大。该方法不要求信号已被捕获和跟踪,即使弱信号环境下所有卫星的信号都无法成功捕获,该方法依然有可能实现直接位置估计。其具体实施策略可以概括如下。

(8)
最后,将(mt,nt)所处栅格点坐标换算成真实的用户地理位置。
2.2 参数估计
集体检测本质上是一种基于最大相关信号能量的卫星导航定位方法,该方法的关键是基于已经获取的包括星历、接收机钟差和概略位置等先验信息(可以由A-GPS提供),然后针对每一候选栅格,计算该栅格对应的每一颗卫星的码相位和多普勒频率。由于报道该技术细节的文献较少,本文给出一种计算方法,如下所述。
假定接收机可获取最近一次成功解算的接收机钟差,则可利用该信息修正本地时钟,并将本地时间统一到GPS时,在栅格遍历过程中,若当前栅格所代表的接收机位置为u,则可建立如下方程:

(10)
(11)
2.3 二分搜索法求解

(12)

(b)计算(a)所得传输时间存在区间的中间时刻MD=(L+H)/2;

(d)重复步骤(b)和(c),直到满足如下条件

(13)
3 系统设计与实验测试
本项目的实验方案采用软件GNSS接收机架构,通过对课题组已有软件GNSS接收机进行改造,构建本算法验证平台,其组成主要由GNSS天线、GNSS仿真信号源、GNSS信号采集器(射频前端和USB数据采集器)和计算机验证系统(计算机、算法模块和分析软件)4大部分组成。
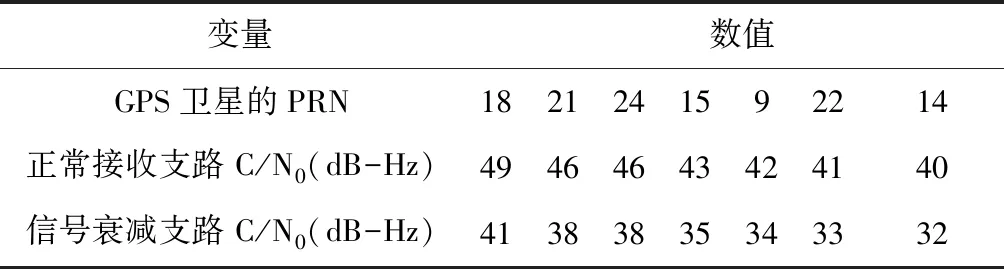
为了突显集体检测技术的优势,本项目基于真实的GPS信号进行了相关实验,GPS信号采集地点为(39.97995°N,116.33410°E,28.9m),为了实验对比,将高增益天线采集到的信号用功分器分成2路,一路接至JAVAD Alpha 2卫星导航接收机(如图1),另外一路经信号衰减器(如图2)接入到射频前端(如图3),通过中频信号采集器(如图4)将采样的中频数据存储到PC,然后利用软件接收机进行处理,采样速率为12MHz,中频频率为4.309MHz,1bit采样。信号衰减器的衰减量调整为8个dB,2个支路获得的信号载噪比情况如表1所示。其中,正常支路的可见星数目为7颗,其卫星分布图如图5所示。

图1 JAVAD Alpha 2型GPS接收机

图2 步进可调衰减器
图3 GPS射频前端

图4 中频数据采集器
表1 不同支路下的信号载噪比情况
变量数值GPS卫星的PRN1821241592214正常接收支路 C/N0(dB-Hz)49464643424140信号衰减支路 C/N0(dB-Hz)41383835343332
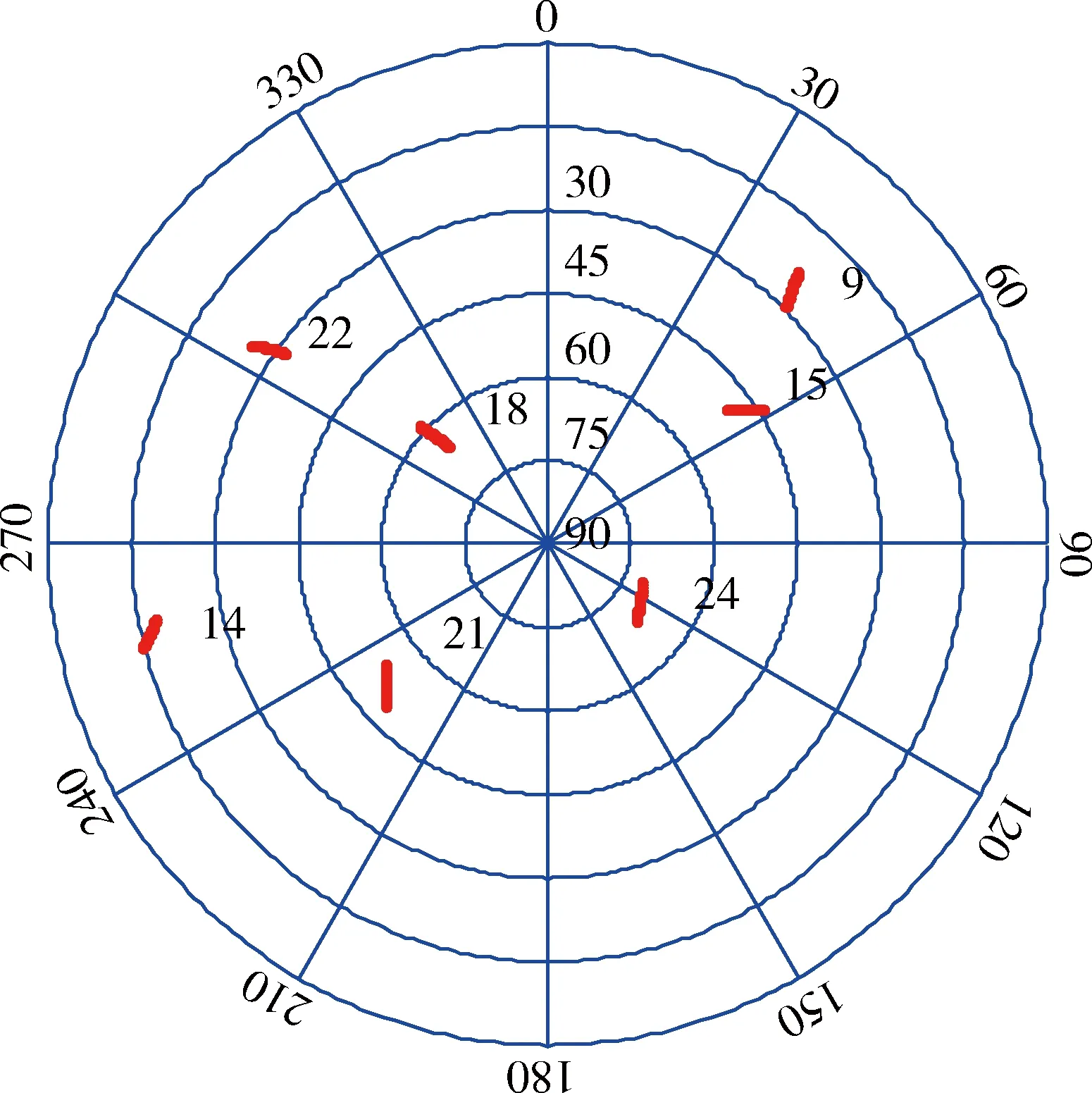
图5 卫星分布图
对于正常接收支路,采用常规的“捕获—跟踪—定位”方法可以进行有效的位置估计,而经过信号衰减器的支路信号的载噪比较正常支路均低了8dB,此时只有18、21和24号星的信号能够成功捕获,其它卫星由于信号较弱不能被捕获,捕获卫星总数不足4颗,因此导致无法采用常规方法实现定位。而对信号衰减支路的中频数据采用集体检测技术,基于概略位置信息和近似高程信息,得到的位置域投影相关图如图6所示,其中北向分量和东向分量的栅格间距为50m。注意,在位置域投影相关图中部形成一个显著的能量峰,其对应栅格点换算成地理坐标与实际信号采集地点相一致。
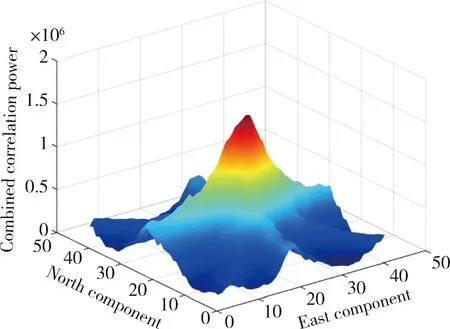
图6 基于全部卫星的位置域投影相关图

图7 基于9、22和14三颗星的位置域投影相关图
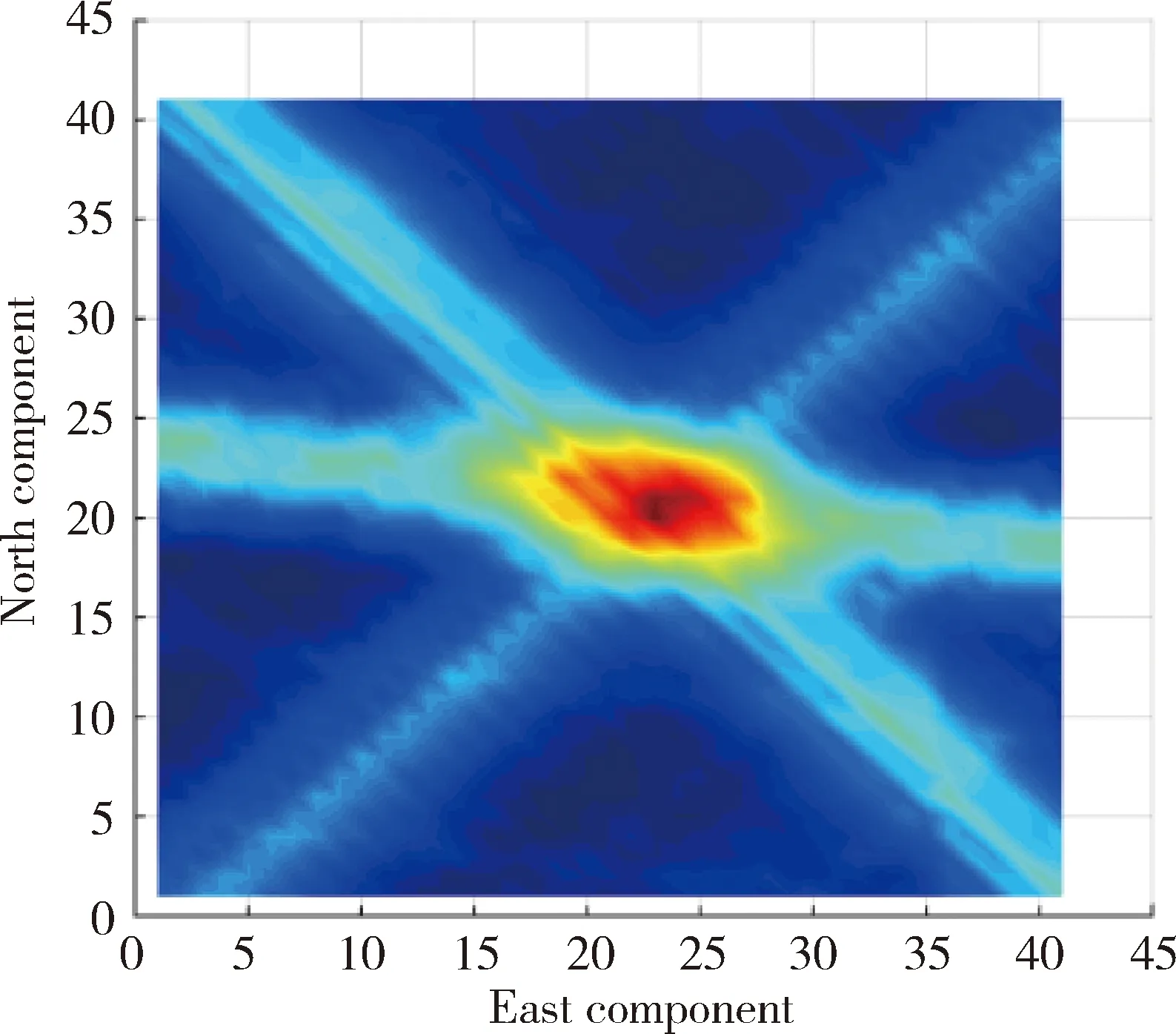
图8 基于9、22和14三颗星的位置域投影俯视图
集体检测算法的优势在于不依赖于至少4颗卫星的成功捕获,卫星数目即使仅有3颗且未能捕获,也能完成位置估计。在图5给出的卫星分布图中,即使采用信号最弱的9、22和14号卫星信号进行能量的非相干累加,其位置域投影相关图分别如图7和图8所示。可以看到,峰值点的栅格位置不变,只是能量幅度值较小,峰的尖锐程度降低,在俯视图中可以看到,峰值点周围的栅格能量近似,受噪声影响,正确位置的估计可能会落在邻近栅格,导致位置估计精度降低。
实验表明,若增大每一个搜索栅格的尺寸,可以在相同大小的先验地理空间中显著减少搜索次数进而提高搜索速度,或者以相同的搜索次数完成在更广阔的地理区域进行搜索。假定先验的地理空间北向和东向跨度均为2km,分别采用不同的栅格尺寸进行集体检测估计,1s进行1次位置估计,连续进行1000次,可以得到表2所示结果。该实验中处理器主频为3.40GHz,内存为2048MB。可以看出,给定先验空间的情况下,栅格尺寸越大,完成一次集体检测所需要的平均计算时间越少,但位置估计精度也越差。
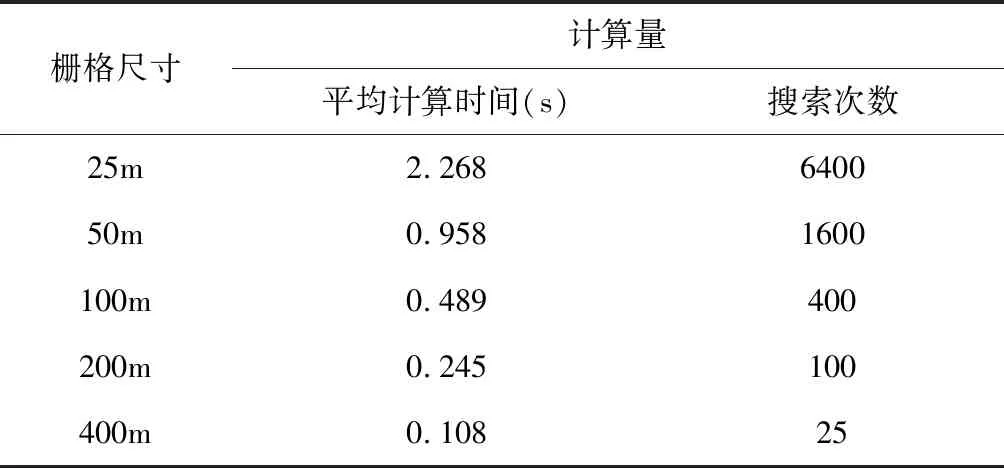
表2 给定先验空间的不同栅格尺寸下的集体检测计算量
4 结论
经典的卫星导航信号处理方法基于“伪距域”计算用户位置,其缺点在于多通道信号之间基于接收机同一位置的相关性被完全忽略,因此信息利用非最优。本文依据集体检测理论,利用A-GPS提供的先验信息,给出了一种基于“导航域”的直接位置估计方法,该方法充分利用了所有可见卫星的信号完成极大似然估计。实际试验表明,未能成功捕获的卫星弱信号依然可有效参与到定位解算中,因此对弱信号等环境下定位解算具有重要参考意义。
猜你喜欢
科技创新与应用(2021年31期)2021-11-09 13:11:18
能源工程(2020年6期)2021-01-26 00:55:22
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
电信科学(2016年9期)2016-06-15 20:27:30
电测与仪表(2016年13期)2016-04-11 11:21:20
弹箭与制导学报(2015年1期)2015-03-11 15:32:23
电工技术学报(2014年7期)2014-11-15 05:53:48
