
基于STM32的双通道压电点胶阀控制系统
2019-08-10 06:36杨少波孙先松
电脑知识与技术 2019年17期
关键词:嵌入式系统
杨少波 孙先松
摘 要:压电点胶阀对点胶量和胶点的一致性控制有着巨大优势,本文主要对压电阀的控制系统做出了详细研究。主控芯片采用STM32F103ZET6,嵌入式实时系统采用UCOSIII。本系统能对压电阀控制参数做出精确设置,以使本系统能够在不同的场合下使用,如:上升时间、开阀时间、下降时间、闭阀时间和撞击力度等参数。本系统主要通过一对互补带死区的PWM波来对压电阀做出精确控制,控制精度可以达到1us。
关键词:STM32;嵌入式系统;UCOSIII;ARM;PWM
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2019)17-0286-02
开放科学(资源服务)标识码(OSID):
现代科技的发展迅速使得很多的电子产品应用广泛,线路板是现在大型、复杂设备工作时的重要载体,在生产线中的线路板点胶环节必不可少,以实现电子元件的加固、密封和隔离。为满足对点胶速度和点胶精度都要求较高的场合,压电点胶阀成为首选。为了进一步加快点胶速度,市面上有很大一部分点胶机使用的是双阀点胶,为了满足市场需求,降低应用成本,本文对双通道压电阀控制系统做了深入研究。
1 系统硬件组成介绍此系统的组成方式如图1所示。此设计主要由三个部分组成,系统控制芯片、大功率驱动电路、压电阀。各个部分的详细分析如下:
1)系统控制芯片为STM32F103ZET6,此芯片是基于ARM Cortex-M3核心的32位微控制器,LQFP-144封装,此芯片具有较大的片内FLASH和和片内RAM,非常适合大型的程序编写。此芯片主频最高可达72M,数据、指令分别走不同的流水线,以确保CPU运行速度达到最大化,能够满足此系统的要求。此芯片有着较多的定时器和DMA资源,其中的2个高级定时器分别控制两个通道的压电阀。
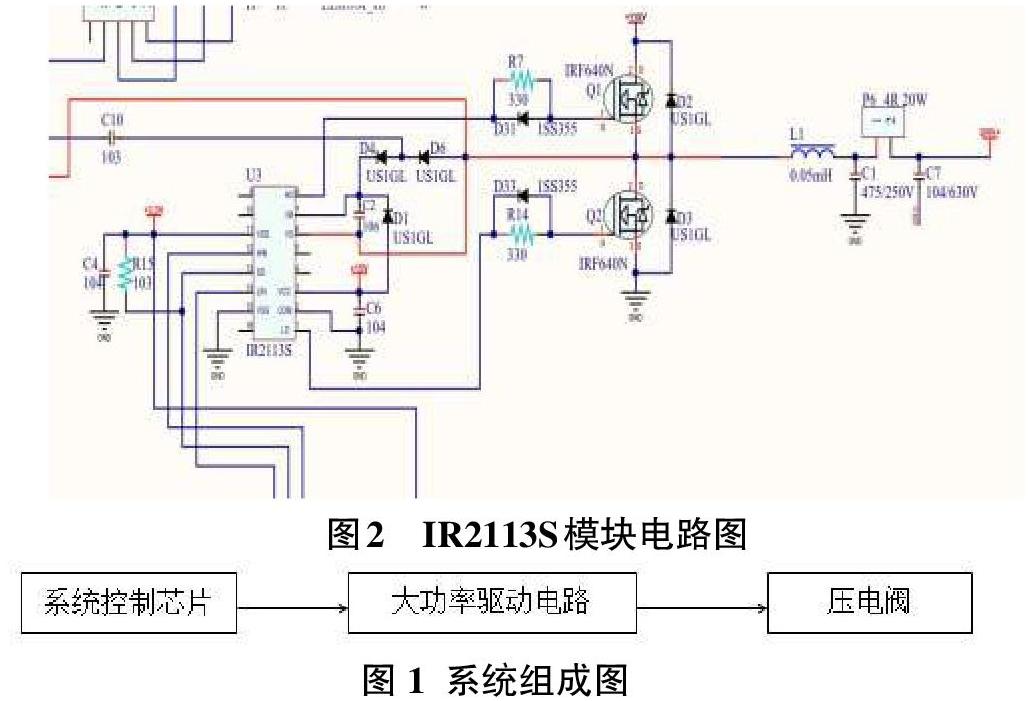
2)大功率驱动电路主要由大功率驱动芯片IR2113S组成,此芯片采用HVIC和闩锁抗干扰CMOS制造工艺,具有独立的低端和高端输入通道;悬浮电源采用自举电路,其高端工作电压可达500V;输出的电源端输出的电源端;逻辑电源电压范围为5~15V,可方便地与TTL,CMOS电平相匹配,而且逻辑电源地和功率地之间允许有±5V的偏移量;工作频率高,可达500kHz;开通、关断延迟小,分别为120ns和94ns,此模块的电路图如图2所示。
此芯片的HIN和LIN分别为高端输入和低端输入,这两个引脚接到一组互补且带死区的PWM波上,用来控制一个压电阀。压电阀接到图2的1、2端上。
3)压电阀主要由压电堆组成,给压电堆两端加上或不加电压来控制压电阀的关闭。若干片压电陶瓷片使用物理串联,电学并联或者串联连接叫压电叠堆。压电陶瓷是一种能够将机械能和电能互相转换的信息功能陶瓷材料——压电效应,压电陶瓷除具有压电性外, 还具有介电性、弹性等, 已被广泛应用于医学成像、声传感器、声换能器、超声马达等。
2 系统软件设计
为了方便程序开发,本系统采用的嵌入式实时操作系统为UCOS,主要使用了UCOS的消息功能和软定时器的使用。UCOS是Micrium公司出品的RTOS类实时操作系统,UCOS目前有两个版本:UCOSII和UCOSIII,本系统使用的是UCOSIII。 UCOSIII是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。UCOSIII提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。
本系统的软件主要有三部分组成,分别是操作界面设计、压电阀参数调整、压电阀参数的保存。完成此三个部分之后,便可实现通过操作界面来修改压电阀参数,并将修改后的参数保存下来,以便系统重启之后仍可以读出上次的参数设置。
2.1 操作界面模块
为了方便显示和参数输入,对于不同的功能设计不同的界面,主要有三个界面,分别是状态显示界面、参数设置界面和模式选择界面。通道1和通道2界面完全一样。
状态显示界面如图3所示。
此界面主要用于系统状态显示,显示当前系统是否工作;当前工作模式是打点还是打线;如果是打点模式,触发一次打多少个点。
参数设置界面如图4所示。
参数设置界面主要用于打点参数的设置,包括开阀时间、关阀时间、上升时间、下降时间、撞击力度等待。此系统还带有参数保存功能,方便下次参数的调用。
模式选择界面如图5所示。
此界面用于选择此系统的工作模式,有打点和打线两种n工作模式。当设置为打点模式时,还可以设置触发一次打多少个点。此系统还有记录压电阀打点个数功能,可以让使用人员了解压电阀的使用情况,以便做出相应处理。
2.2 参数调整模块
2.3 参数保存模块
每次调整参数之后变要将参数保存下来,以便下次开始时调用。每次调整参数后调用setPWMConfigBufferByText(u8 ifSave)将参数保存在IIC器件中,此器件具有掉电不丢失特性,适合参数的保存。
3结果测试
本系统最核心的模块就是驱动压电堆的一组互补带死区的PWM波形,打一个点分为三个阶段,分别是上升阶段、开阀阶段、下降阶段。
上升阶段波形如图6所示。
开阀阶段波形如图7所示。
下降阶段波形如图8所示。
4结论与展望
本系统能够稳定高效的运行,满足实用需求,同时本系统也有需要提高的地方,如:界面设计过于单调、缺乏对阀体温度的检测。增加对阀的温度检测后,当阀体温度过高时,则强制停止压电阀的使用,能够极大地提升对压电阀的保护。
参考文献:
[1] 王彬彬. 基于STM32的指纹锁控制系统设计与实现[D].西北师范大学,2018.
[2] 郑伟帅. 基于STM32的频率自动跟踪与振幅恒定的超聲电源的研制[D].大连理工大学,2018.
[3] (美)Jean J.Labrosse,嵌入式实时操作系统uC/OS-III[M].北京:北京航空航天大学出版社,2012.
[4] 张勇.ARM Cortex-M3嵌入式开发与实践—基于STM32F103[M].北京:清华大学出版社,2017.03
[5] 王国力,绳鹏,谢越,等.基于STM-32的红外语音控制系统[J].信息记录材料,2018,19(11):123-125.
[6] 梁永湖,章金标,等.基于STM32F103V8T6的船用卫星电视天线控制系统[J].信息化研究,2018,44(2):57-62.
[7] 康文倩. 基于STM32F103的电量采集与无功补偿控制系统的设计与实现[D].华北电力大学,2015.
[8] 滕艳平,贾思禹,金梅,等.基于ARM11的μC/OS-II操作系统内核移植实验的设计[J].实验技术与管理,2016,33(03):142-146.
[9] 李祁,王凤芹,张燕红.嵌入式实时操作系统μC/OS-Ⅱ在STM32开发板上的应用[J].计算机与数字工程,2014,42(1):164-168.
[10] 冯冰.2ARM11嵌入式系统实时网络通信和PWM波输出控制的实现[J].电子世界,2017(14):156.
【通联编辑:唐一东】
猜你喜欢
计算机教育(2016年7期)2016-11-10
计算机教育(2016年7期)2016-11-10
