消防动中通天线控制系统改造升级中的问题研究
2019-08-07 06:01幸雪初
网络安全技术与应用 2019年8期
◆幸雪初 任 巍
(1.湖南省消防救援总队 湖南 410205;2.长沙市消防救援支队 湖南 410008)
1 引言
卫星通信具有不受地域、环境及时间限制的特点,成为消防综合救援主要应急通信手段之一,近年来得到了迅速的应用和发展,其中动中通系统作为消防应急卫星通信的模式,越来越受到高度重视。在动中通系统中,动中通天线是重要的关键设备,伺服跟踪控制系统的可靠性及跟踪精度始终是动中通天线面临的最主要的技术瓶颈。为了在确保跟踪可靠性、精度的前提下有效降低成本,目前国内相关单位均在加紧开发新型的伺服跟踪控制系统,但这一过程是漫长而且是逐步渐进的。对于消防动中通系统应用单位来说,建设越早,其使用的动中通天线技术水平越低。但由于系统建设时间不长,又不可能将系统报废重建。为此,如何利用先进成熟的技术对原动中通天线进行技术改造,提高性能而又不需要大的投入具有重大的现实意义。
我单位动中通系统是2010年建成投入使用的,是消防系统最早建成的动中通卫星系统,曾经是消防动中通系统应用的示范项目。多年来系统稳定,在灭火抢险救援中发挥了应有的作用。该系统使用的0.9米动中通天线系统,如图1所示。
但由于建设较早,技术相对不成熟,为此我单位提出了在不对系统硬件大改的前提下,通过控制软件的升级来提高控制性能的思路,在原厂家的大力配合下,获得了成功。
本文以我单位动中通天线为对象,探讨了基于双速度环的稳定跟踪系统的原理。通过引入前馈控制技术对原系统的控制系统进行了软件升级,显著提高动中通天线跟踪精度,使我单位的动中通天线性能得到了很大提高,为我国突破制约天线实现大规模产业化发展的主要技术瓶颈提供了新的技术手段。同时也为消防动中通天线的技术改造升级提供了一条思路。

图1 动中通卫星天线
2 我单位动中通天线系统改造前的控制系统分析以及改造思路
如图 2所示,我单位使用的动中通天线为方位/俯仰两轴结构的稳定跟踪平台,在控制系统设计时将其化解为两个单轴的稳定跟踪系统,每个轴的控制结构如图2,控制模型如图 3,采用的是单速度环控制系统。
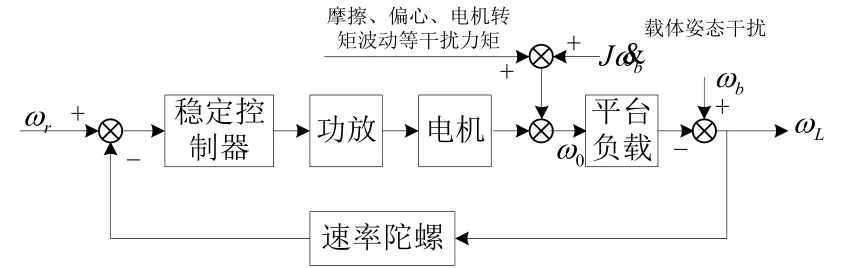
图2 原动中通天线单轴速度环控制结构
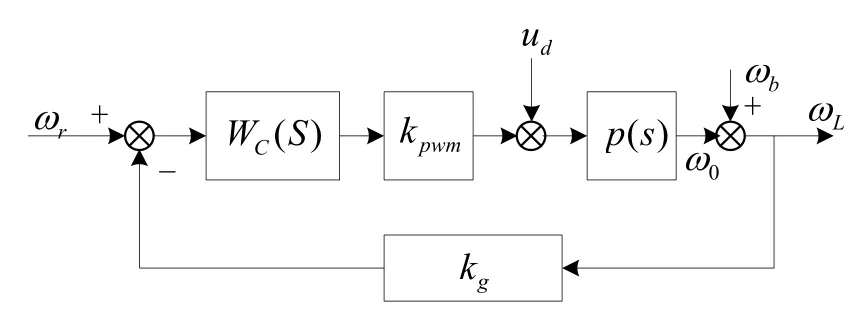
图3 原动中通天线单轴速度环控制模型

在控制器设计时,在通带内满足:

则有:

另外,原系统完全属于反馈控制系统,在控制领域,前馈和反馈是两种并列的控制方式。具有各自的优势。反馈控制必须等到被控参数出现偏差后,控制器才动作,以补偿扰动对被控参数的影响。而动中通天线在实际工作过程中恰恰是要在受到各自姿态干扰的情况下,保持系统的输出(天线指向)不变,应用前馈控制会大大提该系统抗干扰的性能。
为此,本文提出采用以下两种技术思路对原天线控制系统进行技术改造升级。这两种方案均不需要对原系统的硬件进行变动,只需要升级软件系统,也具有实现的可操作性。
(1)采用双速度环方案取代原系统的单速度环方案;
(2)引入前馈控制技术提高系统的控制性能;
3 双速度环稳定控制系统的分析
在控制系统设计时将其化解为两个单轴的双速度环稳定跟踪系统,如图4所示,数学模型框图如图5。

图4 动中通天线单轴双速度环控制结构
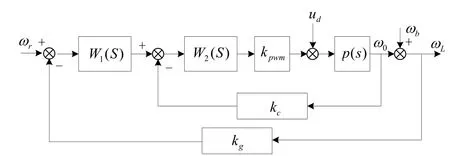
图5 双速度环的模型框图
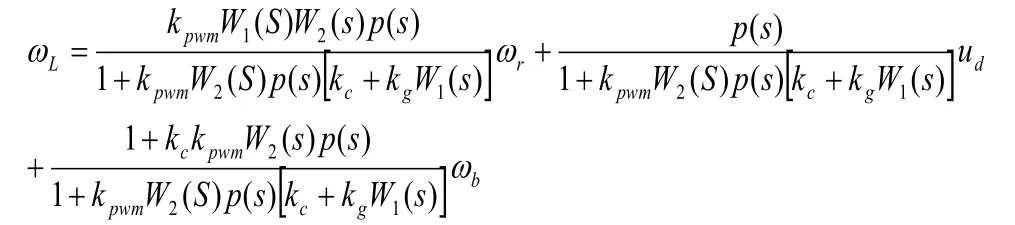
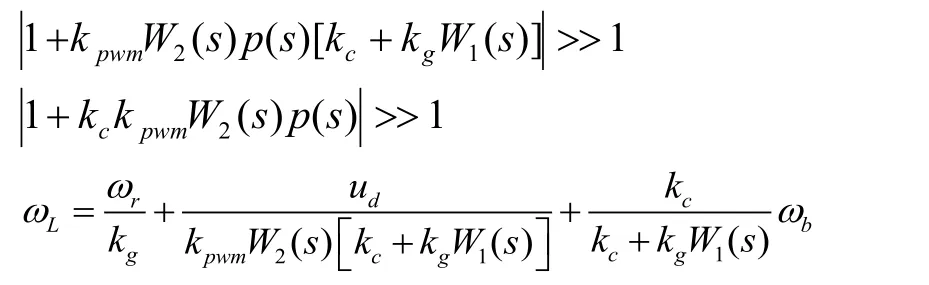
在控制器设计时,在通带内满足:
4 引入前馈控制的双速度环稳定控制系统
4.1 引入前馈控制的双速度环稳定控制结构
在控制领域,前馈和反馈是两种并列的控制方式。前面讨论的都是反馈控制系统的应用,反馈控制必须等到被控参数出现偏差后,控制器才动作,以补偿扰动对被控参数的影响。
引入前馈控制的双速度环控制结构如图6所示。
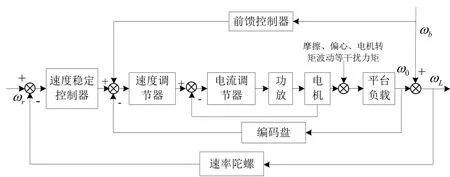
图6 引入前馈控制的双速度环控制系统
前馈控制虽然对扰动有很好的抑制作用,但必须基于两个前提。一是必须精确得到被控对象的数学模型,二是对扰动的精确测量或估计。下面以俯仰轴为例探讨前馈控制器的设计与实施。
4.2 俯仰轴电机速度闭环的传递函数的辨识
为了得到被控对象的数学模型,采用单位阶跃激励法辨识被控对象的数学模型。辨识的实验框图入图7所示。
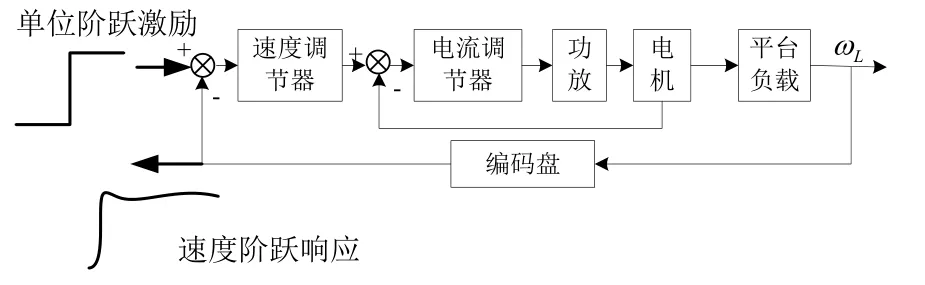
图7 模型辨识框图
测试条件:
(2)响应单位:驱动器设定的速度单位(rpm)。
(3)采样周期:2.048ms。
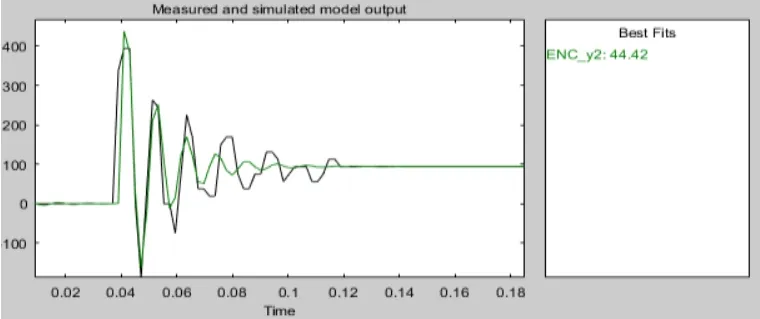
图8 辨识曲线图
4.3 俯仰正馈控制器设计与验证
前馈控制系统的框图如图9。


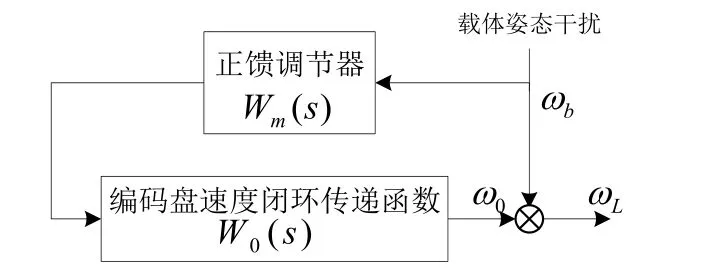
图9 前馈控制系统框图
4.4 载体姿态干扰的测量估计
在动中通天线控制系统中,载体的姿态干扰没有办法直接测量,只能通过中间测试量估计得到。如图10所示。
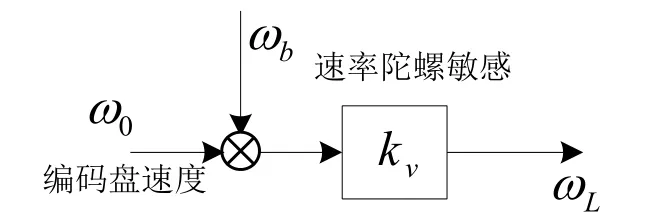
图10 载体姿态干扰估计
5 改造前后效果对比
采用双速度环和前馈控制两种技术对我单位原动中通天线进行改造的技术思路,理论上是可行的。由于原系统硬件结构采用的基于CAN总线的多CPU分布式控制系统,控制系统都是数字控制系统,多 CPU结构中也有足够的冗余计算能力处理复杂的算法,升级时只需要对原系统的任务进行重新规划,不需要更改任何硬件,具有实施的可行性。
编写软件后,对我单位的动中通天线控制软件进行了升级并进行了调试,改造前后动中通天线的跟踪性能在摇摆台上测试的结果对比如图11。
动中通天线改造前:跟踪误差的RMS值为0.48dB,极差值:3.2dB。
动中通天线改造后:跟踪误差的RMS值为0.28dB,极差值:0.9dB。

图11 改造前后对比图
6 结语
实践证明,本文研究双速度环和前馈控制两种技术在动中通天线控制系统中的应用,对于提高动中通天线伺服跟踪控制系统的性能提供了新的解决方案。探讨出一种新的稳定跟踪技术,在不提高成本的前提下,有效地提高控制系统,从而很好解决制约天线实现大规模产业化发展的主要瓶颈。本论文的实践也为消防系统动中通天线的技术升级提供了一条切实可行的思路。
猜你喜欢
井冈山大学学报(自然科学版)(2021年5期)2021-11-20
东方少年·布老虎画刊(2021年8期)2021-08-23
湖南文学(2021年2期)2021-04-07
汽车维修技师(2019年7期)2020-01-16
环球时报(2018-12-28)2018-12-28
动漫星空(兴趣百科)(2018年9期)2018-10-25
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
新高考·高一物理(2014年4期)2014-09-17
汽车电器(2014年5期)2014-02-28