一种新的MFCW雷达与距离速度联合估计方法
2019-08-07 00:47:46姜春磊陈宝欣陈林军
兵器装备工程学报 2019年7期
姜春磊,陈宝欣,陈林军
(1.烟台黄金职业学院 信息工程系, 山东 招远 265401; 2.海军航空大学, 山东 烟台 264001;3.中国人民解放军92721部队)
近年来,智能交通、城市“低慢小”目标探测等问题开始成为热门的研究方向。其中,以连续波(continuous wave,CW)体制为基础的雷达系统,因为具有发射功率低、结构简单、体积小、重量轻等优点,从而更适用于车载辅助驾驶、城市环境下低空监视等领域,并得到了密切关注[1,2]。常见的连续波雷达体制与其特性在表1中列出。简单的单频连续波雷达只能测量目标速度,几乎难以用于测距。最常见的线性调频连续波(linearfrequency modulated continuous wave,LFMCW)雷达可以同时实现测距、测速,且有着较高的测量精度。但是LFMCW雷达在多目标环境下容易产生虚假目标,这虽然可通过发射多个不同调频率的信号实现虚假目标的判别[3],然而这种天生的缺陷很难满足实际需求。文献[4]提出了一种多频移键控(multiple frequency shift keying, MFSK)雷达,结合了LFM与FSK的优点,可以同时测量多目标的距离和速度,但是存在的一个问题是,在多目标速度相同时,在距离上无法分辨,并且其信号模型的推导过程并不严谨[5]。早期的多频连续波雷达(multiple frequency continuous wave, MFCW)同时发射两个单频连续波信号,通过比相实现测距,因此也不能分辨同速、不同距离的目标,多用于靶场弹道测量等场合[6-7]。
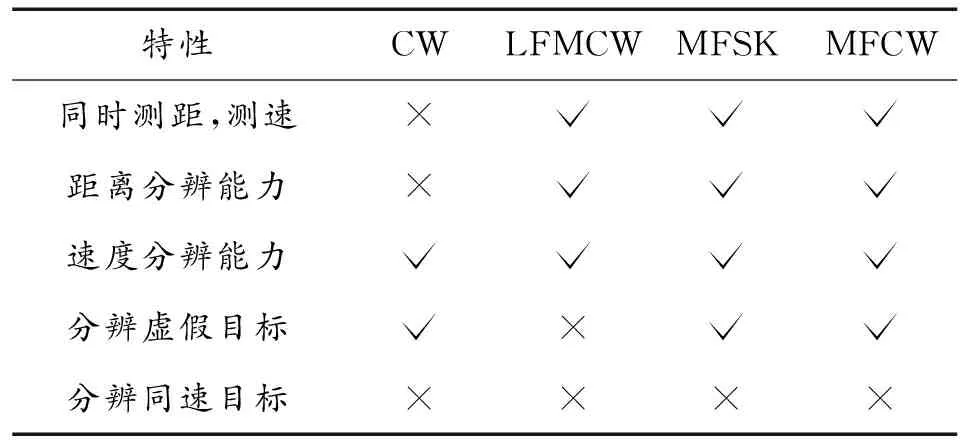
表1 不同连续波雷达特性
针对上述问题,本文提出了一种新的多频连续波雷达,通过增加发射频点数,从而增大距离维上的自由度,实现距离维上的分辨,推导了这种新体制下的信号模型。在此基础上提出了一种基于迭代插值傅里叶系数的二维联合距离、速度估计方法,推导了距离、速度估计的克拉美罗下限。最后,通过仿真实验验证了所提方案与方法的有效性。
1 MFCW雷达测距原理
早期的多频连续波雷达发射频率分别为f1和f2的连续波信号照射目标,回波信号分别与f1、f2混频后可得到包含目标距离和速度信息的两路多普勒信号。假设t时刻雷达与目标的距离为r(t),则两路信号可写为:
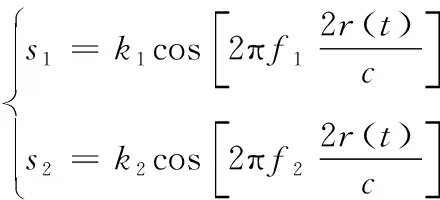
(1)
式(1)中,c为光速。则距离信息存在于两路多普勒信号的相位差Δφ之中,因此通过测量Δφ即可得到目标的距离,即
(2)
实际应用时,首先对两路信号做FFT运算,然后通过恒虚警技术设定门限检测目标,从而可获得目标速度,最后通过两路目标多普勒频率处的相位差计算瞬时距离。由于只采用两路信号比相测距,因此当多个目标的速度相同时,其在距离上并不能分辨。解决办法是同时发射多个单频信号,从而增加距离维上的自由度以实现距离维上的分辨能力。
2 新的MFCW雷达信号模型的导出
假设雷达采用收发分离的配置,t时刻雷达与目标的距离为r(t)=r0-vt,v为朝向雷达的目标径向速度。发射天线同时发射M个单频连续波,在t时刻发射的第m个载频的连续波可写为:
sm(t)=cos(2πfmt)
(3)
式(3)中,fm=f0+Δfm=f0+mΔf,m=1,2,…,M。则接收天线接收到的位于距离r(t)处的目标反射回波为:
(4)
多频连续波雷达的接收机原理框图如图1所示,接收信号首先经过模拟混频降为零中频信号,即
4πfmvt/c-4πf0r0/c]
(5)
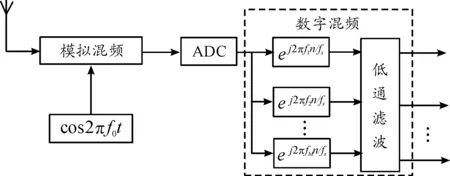
图1 接收天线与接收机原理框图
假设MΔf≪f0且系统的最大可探测速度取vmax=4Δfc/f0,则在一段时间内式可近似为:
2πfDt-4πf0r0/c]
(6)
式(6)中,fD=2vf0/c≈2vfM/c。设采样频率fs=2MΔf,经过AD转换得:
2πfDn/fs-4πf0r0/c]
(7)
最终,接收信号经过接收机处理后,对应第m个发射载频的信号可表示为:
xm,n=αej2π(-2Δfmr0/c+fDn/fs)
(8)
式(8)中,e-j4πf0r0/c作为常数相位因子可看作目标散射系数的一部分而不影响分析。将M组接收阵元、N个采样信号表示成矢量形式可得:
x=αaR⊗aD
(9)
若观测空间中存在多个目标,则接收信号可表示为多个目标回波叠加的形式,即
(10)
式(10)中,n为接收机噪声,一般假设为服从圆周对称的复高斯随机分布。基于上述信号模型,则新的多频连续波雷达可通过二维频率估计算法,如MUSIC、ESPRIT等,实现距离与速度的二维联合估计。

3.1 基于迭代插值傅里叶系数的二维联合频率估计
若已知目标个数为I,将式改写为:
(11)
(12)
式(12)中,Wp为噪声的傅里叶系数。
忽略噪声项,将式(11)代入式(12)可得:
(13)
(14)
(15)
(17)

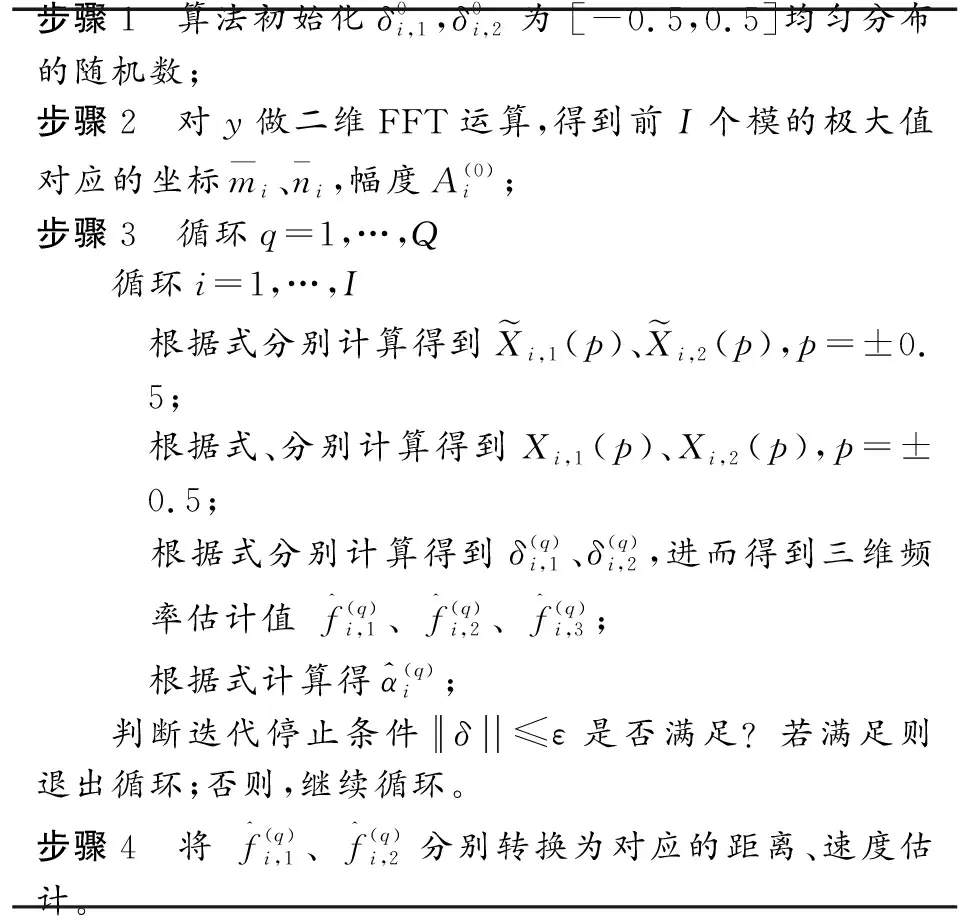
表2 算法流程
3.2 克拉美罗下限
首先以一维频率估计的克拉美罗下限开始推导,将式改写为y=Aα+n的形式,其中A=「a(f1)a(f2) …a(fI)⎤为导向矢量矩阵。根据文献[8]可得一维频率矢量f=[f1f2…fI]T的克拉美罗下限为:
(18)
式(18)中,σ2为噪声方差;D为导向矢量导数矩阵,定义如下,
Re(·)与lm(·)表示取实部与取虚部运算。
(19)

(20)
4 仿真实验
本节首先通过仿真来验证所提方案的有效性,然后测试了所提二维联合频率估计算法的性能。仿真参数设置如下:f0=10 GHz,Δf=10 kHz,M=32,fs=660 KHz,d=0.015 m。接收机的数字低通滤波器采用IIR椭圆滤波器,其通带波纹、阻带衰减和通带边缘频率分别设为0.1 dB、60 dB、5 kHz。
4.1 接收机仿真实验
本小节主要仿真ADC采样后的数字混频和波束形成部分。考虑一个点目标位于距离7 500 m处,多普勒频率为1.8 kHz(无频率泄露),信噪比为30 dB。经采样、数字混频后,目标回波被分离为32路多普勒信号。简洁起见,只画出前3路信号的功率谱,如图2(a)所示。可以看出,3路通道的谱峰很好的重叠在一起,从而说明了本文所提数字混频的有效性。对32路多普勒信号某一时刻的数据做匹配滤波并归一化(Normalized matched filter,NMF)和Capon波束形成,结果如图2(b)所示。其中NMF结果显示其距离谱为比较理想的Sinc函数形状,峰值旁瓣比为-13.2 dB,这与理论值-13.26 dB误差在0.1 dB以内,与设计要求一致。同时,多普勒谱和距离谱的最大值位置分别为1 800 Hz和7 500 m,也与预期一致。因此,所提接收机方案可以有效分离发射信号,从而实现通过不同的频率信号在距离维上采样。
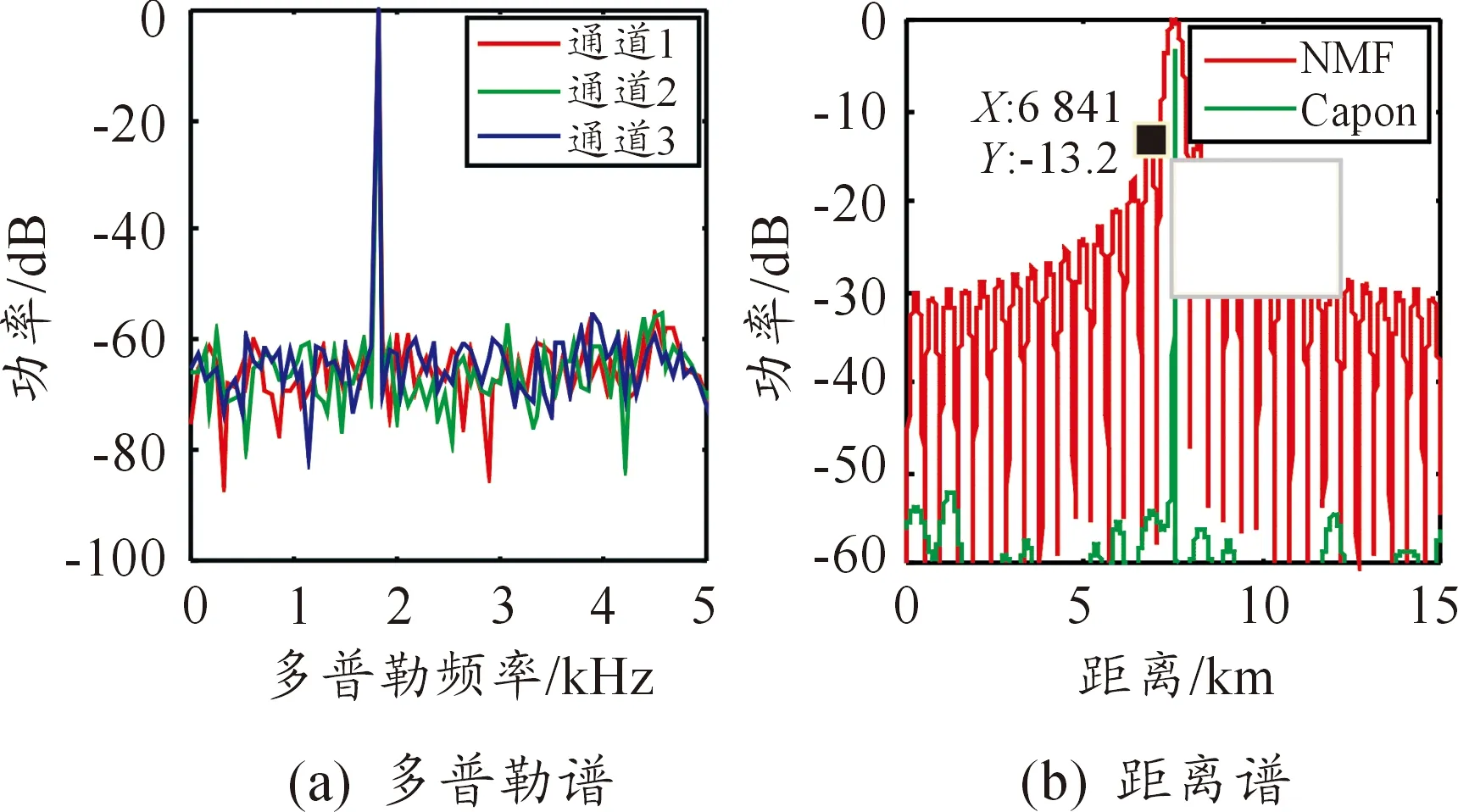
图2 接收机信号谱
4.2 算法仿真测试
4.2.1 收敛性验证与单目标时算法的性能分析
为便于分析,考虑只有一个目标位于7 500 m,多普勒频率为1.8 kHz时,算法中频率剩余δ1=δ2=0时的收敛情况,结果如图3所示。可以看出,对于随机初始化的频率剩余,经过两次迭代运算后,很快收敛至真实值。

图3 频率剩余的收敛情况
无偏的最大似然估计具有最小的均方误差,所以采用最大似然估计作为本文的对比算法以验证所提算法的性能。本文算法与最大似然估计结果如图4所示。可以看出,在单目标情况下,本文算法与最大似然估计的估计精度相当。
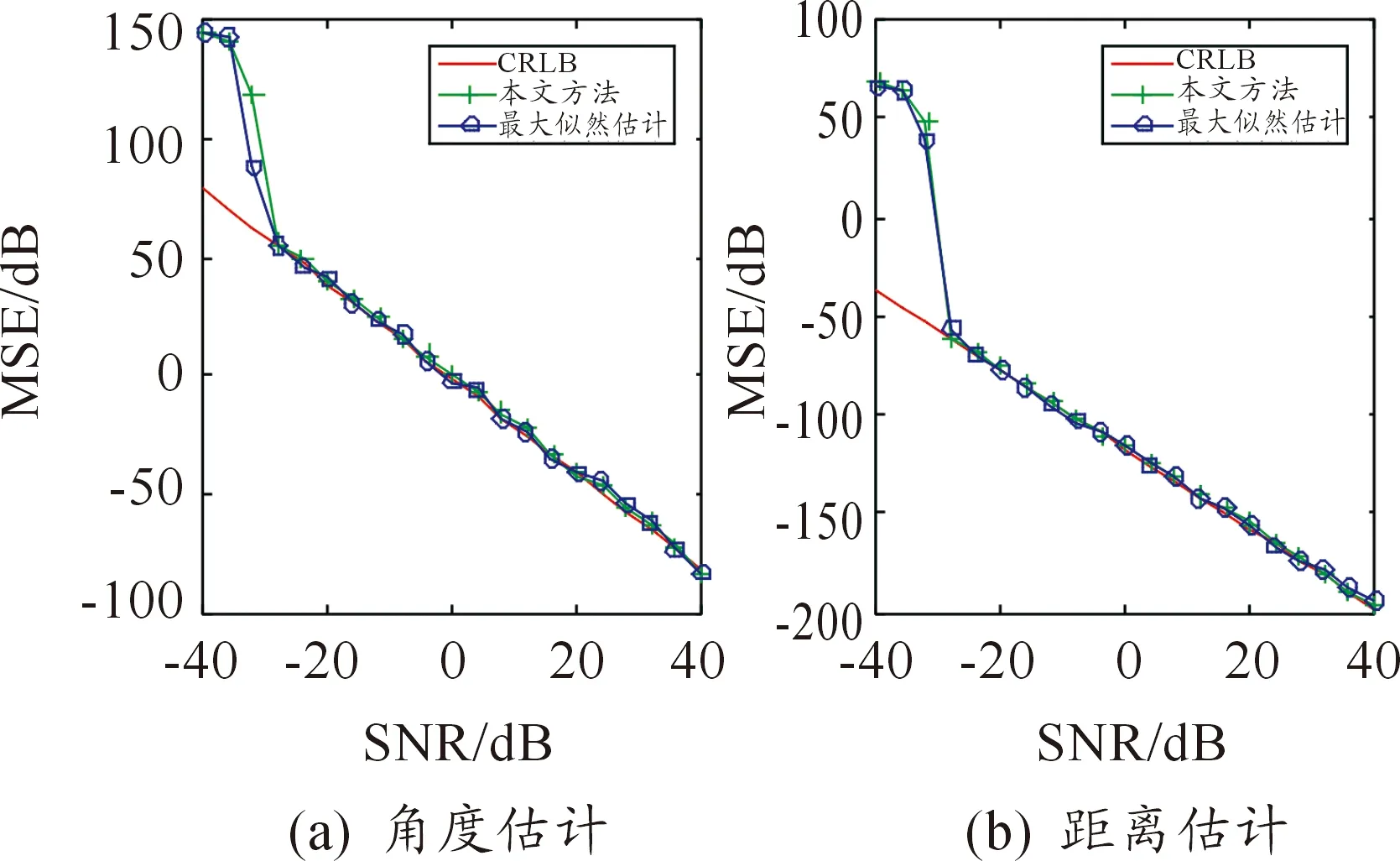
图4 算法性能比较
4.2.2 两目标速度相同的情况
考虑两个同速目标,速度v1=v2=28 m/s,距离分别为7 500 m、3 750 m。取N=256个快时间采样点,测试所提算法对距离和速度的估计情况,结果如图5所示。可以看出,在两目标速度相同时,本文所提多频连续波雷达仍可分辨目标,且本文算法对距离和速度的估计精度很高,在一定信噪比下基本达到克拉美罗下限。
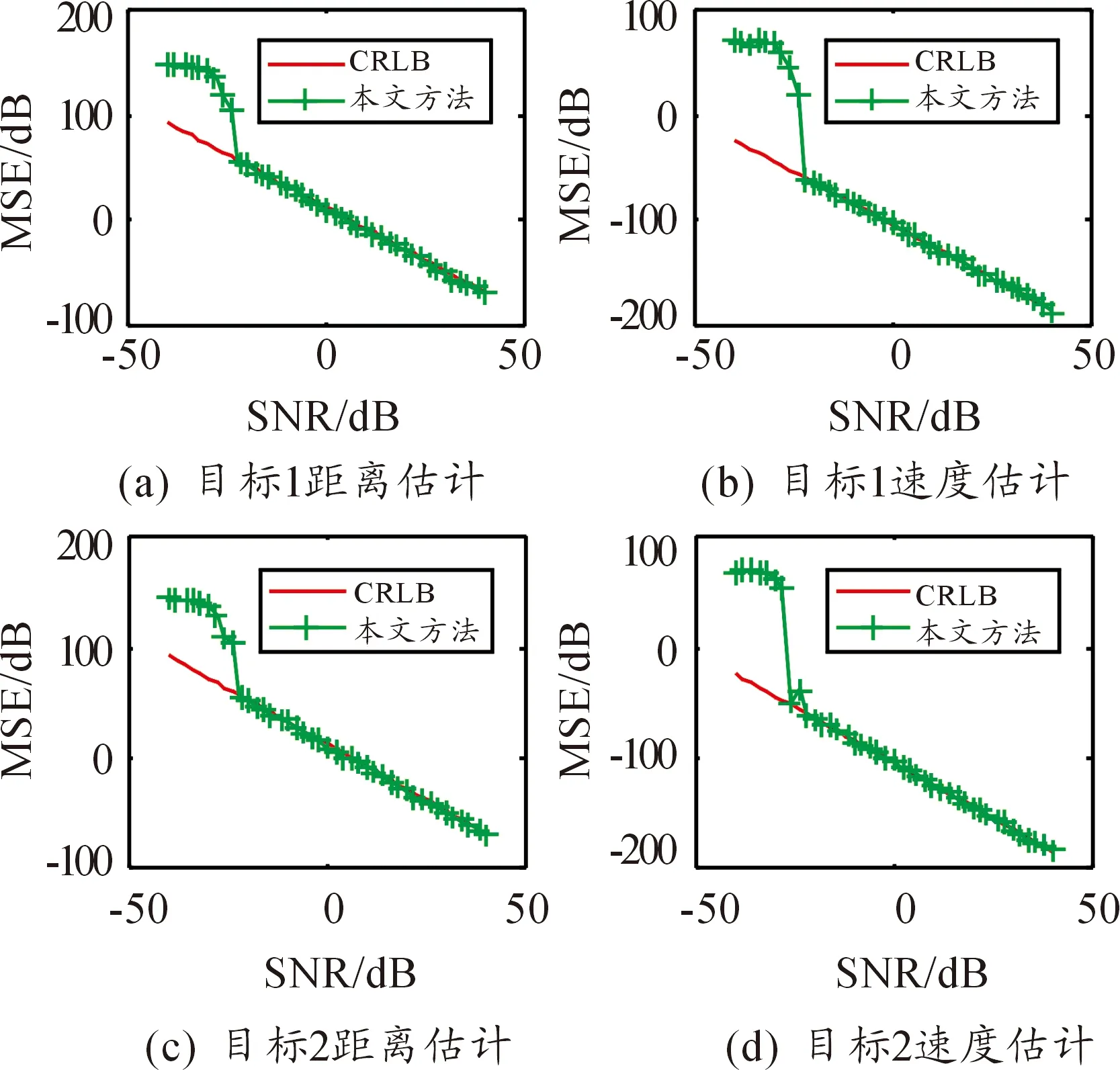
图5 两目标速度相同时的估计结果
5 结论
类似于阵列传感器在空域采样可得到角度测量,时域采样可得到速度(多普勒)测量,多频连续波雷达通过发射不同频率实现对距离维的采样,从而实现距离测量,这为雷达测距提供了一个新思路。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
火控雷达技术(2016年3期)2016-02-06 02:30:26
电子器件(2015年5期)2015-12-29 08:43:38
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
机械与电子(2014年2期)2014-02-28 02:07:47