
基于不定态轨道下的接触悬挂数据库建维一体化探索
2019-08-03 02:52李松茂
中国新技术新产品 2019年11期
关键词:接触网
李松茂

摘 要:接触网接触悬挂参数稳定是机车安全运行的一项重要指标,只有做到施工过程中接触网参数静态稳定,才能为运营维护过程中的动态稳定打下良好的基础,统一制定建设、维护过程中使用的方法,达到建维一体化的效果。为确保不定态轨道下接触网悬挂数据可控,参数统一。需要一个系统性与流程性的方法来进行控制。统一施工、运营过程中所需求接触悬挂数据库,可在任意条件轨道状态下稳定接触网接触悬挂状态。
关键词:接触网;不定态轨道;接触悬挂参数;测量平差;数据维护
中图分类号:U225 文献标志码:A
0 前言
目前,许多建筑行业都采用建维一体化的模式来进行工程管理运营维护。建维一体化就是从工程建设开始,将建设维护通过统一管理的方式,形成管理团队一体化、管理方法一体化、管理平台一体化,从而达到施工运营的规范化与标准化。目前接触网接触悬挂参数数据库就建维一体化来说,可实现管理方法、管理平台一体化。该文主要针对接触网接触悬挂参数在不定态轨道下的建维一体化管理进行阐述。
1 测量方法的设定
要想实现接触网建维一体化对接触悬挂的控制,测量方法是其中重要的一个环节。基于目前全国客运专线的有砟铁路的轨道状态不稳定的情况。在施工过程中存在轨面不成型不到位时与接触悬挂参数稳定之间的矛盾,在运营维护过程中存在轨面机械调整与接触悬挂不可调的矛盾。这2个矛盾使得施工过程中的接触悬挂调整量非常大,运营维护过程中的吊弦更换量特别大。在此情况下,接触网的接触悬挂参数基于理论轨面高度调整便显得尤为重要。目前,基于四等水准的接触悬挂参数相对值测量技术可满足相关要求,满足建設、运营维护过程中的需求。
1.1 低轨面高程计算
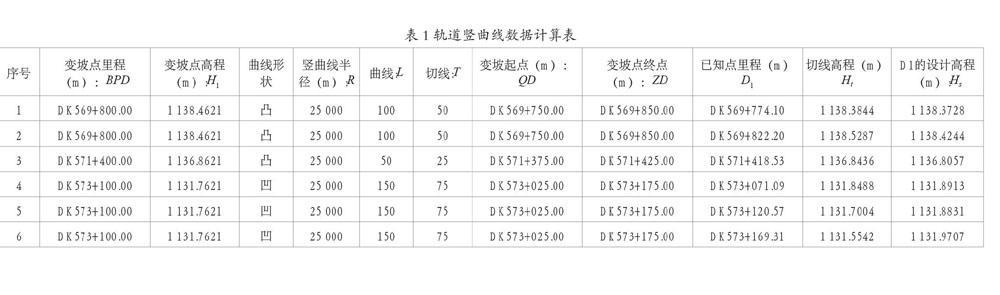
根据设计给出的全线竖曲线(坡度)表,利用竖曲线高程计算方法将全线每根支柱对应里程的设计轨面高程计算出来。参考竖曲线计算原理图(如图1所示),逐点进行各里程的设计高程计算。
1.2 基于四等水准的接触悬挂计算参数测量
与目前接触网吊弦单点测量的方式不同,该测量方法是在一个测量闭环曲线内,在一定距离内穿插测量已知CPII(CPIII)点桩,控制后期平差计算的误差值。
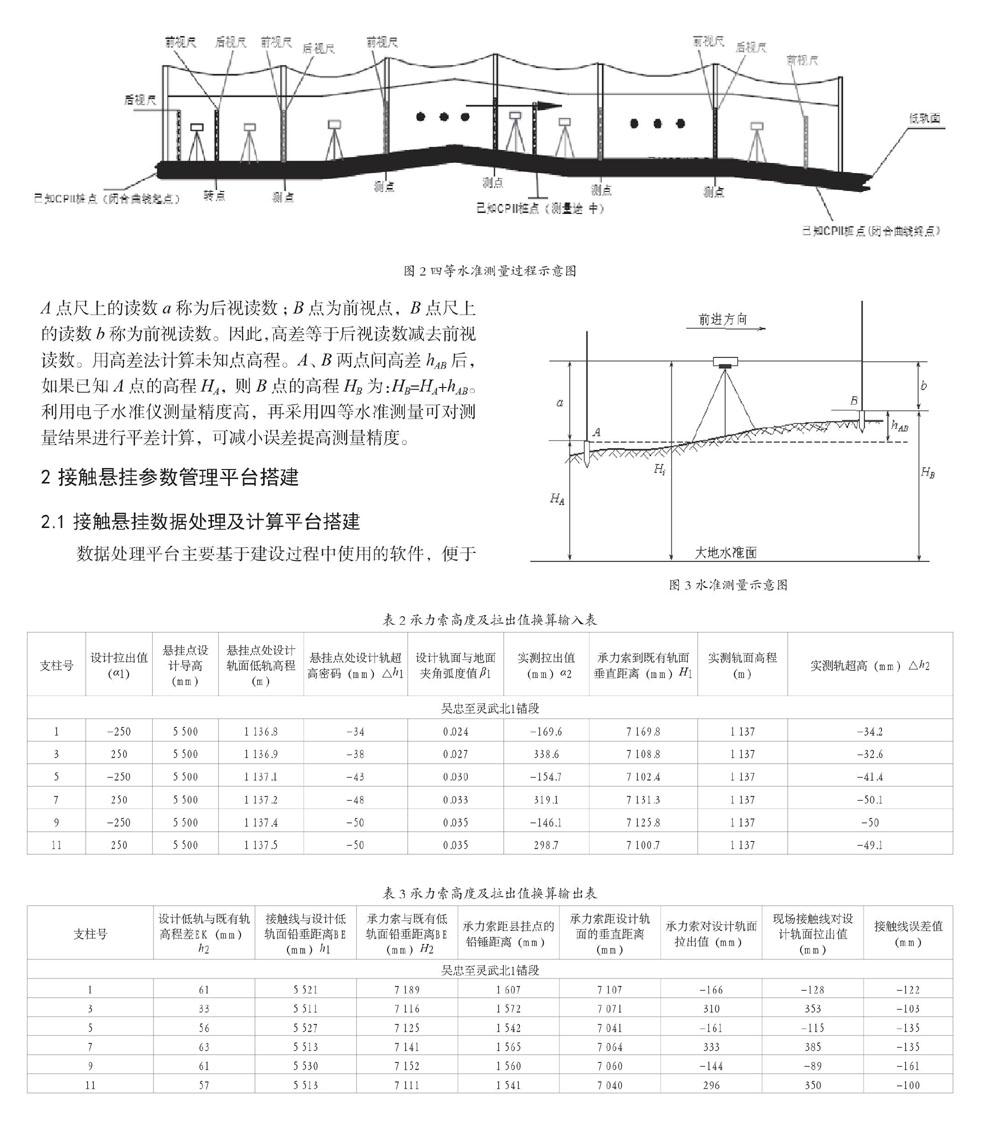
客运专线沿线一般每间隔600 m处设置CPII点永久标准标桩。高程测量前首先规划好测量径路和每个测量点,每条测量径路分别以一个已知CPII桩点作为测量路径的起始测量点,并将沿测量路径分布的已知CPII点和接触网支柱对应轨面点分别设置一个测量点,第1次测站放置在起测量点和第2个测量点中间,第2次测站放置在第2个和第3个测量点中间,依次进行测站放置,直至完成所有测量点的测量。每个测站采用四等水准测量法进行观测。测量方法如图2所示。
通过电子水准测量提供的水平视线,借助带有分划的水准尺,直接测定地面上2点间的高差,然后根据已知点高程和测得的高差,推算出未知点高程。如水准测量示意图3所示,A、B两点间高差hAB为:□AB=a-b。A点为后视点,A点尺上的读数a称为后视读数;B 点为前视点,B 点尺上的读数b称为前视读数。因此,高差等于后视读数减去前视读数。用高差法计算未知点高程。A、B两点间高差hAB后,如果已知A点的高程HA,则B点的高程HB为:HB=HA+hAB。利用电子水准仪测量精度高,再采用四等水准测量可对测量结果进行平差计算,可减小误差提高测量精度。
2 接触悬挂参数管理平台搭建
2.1 接触悬挂数据处理及计算平台搭建
数据处理平台主要基于建设过程中使用的软件,便于运营维护中的数据查找及数据再次分析。数据处理平台主要考虑设置单点计算界面、批量计算界面。详见软件数据计算界面图4。
基础的参数主要包括支柱号、设计拉出值(α1)、悬挂点设计导高、悬挂点处设计轨面高程(低轨)、悬挂点处设计轨超高(△h1)、实测拉出值(α2)、承力索到既有轨面垂直距离(H1)、实测轨面高程(低轨)、实测超高(△h2)等情况,承力索高度及拉出值换算输入表(表2)、承力索高度及拉出值换算输出表(表3)。
2.2 二维码数据库
结合接触悬挂数据处理及计算平台,将相关基础数据统一以支柱为单位,纳入二维码数据库管理。将合成后的二维码安装到支柱上,通过二维码(如图5所示)扫描设备进行内容识别,体现数据库信息(表4)相关内容。便于作为施工、运营过程中的调整依据。
3 结语
通过统一施工与运营维护过程中的测量方法,来达到稳定接触网接触悬挂参数的目的。通过施工过程中的数据库的组建,为运营过程中的参数调整提供参考依据。最终实现接触网接触悬挂数据库的建维一体化管理。
参考文献
[1]朱卫军.二维码识别技术在设备管理中的应用[J].科技展望,2017(4):145.
猜你喜欢
云南画报(2021年10期)2021-11-24
云南画报(2020年12期)2021-01-18
上海铁道增刊(2017年3期)2018-01-22
电气化铁道(2017年1期)2017-04-16
西南交通大学学报(2016年3期)2016-06-15
铁道通信信号(2016年10期)2016-06-01
现代工业经济和信息化(2016年4期)2016-05-17
电气化铁道(2016年6期)2016-05-17
电气化铁道(2016年4期)2016-04-16
电气化铁道(2016年4期)2016-04-16
