
无人机航拍在铁路建设管理中的研究应用
2019-08-01 06:50吕晓煜
铁道勘察 2019年4期
吕晓煜
(中国铁路设计集团有限公司,天津 300134)
铁路建设工期一般较长,建设期内沿线地物变化明显,施工设计采用的大比例地形图及正摄影像图现势性差且分辨率低,难以反映现场的真实情况,对施工阶段铁路沿线的抢栽抢建、用地界管理、违建乱建等问题无法进行有效的识别和监督。传统方法一般采用人工调查加分区实时监管,效率低下且耗费巨大,既影响工程进度,又易引起民事争议。因此,研究一种高效、经济的方法非常有必要。
轻小型无人机是近几年发展起来的一种新兴航空遥感技术,正逐步成为传统航空摄影测量手段的有效补充[1-2]。无人机携带的非量测型数码相机平台具有受天气影响小,作业方式灵活快捷,影像时效性强,构建、维护成本低等优势,在全景影像拼接、工程动态辅助管理方面发展迅速[3-4]。通常情况下,相机等成像设备受航高和焦距的限制,导致单张影像无法囊括所有感兴趣区域,加之铁路工程为带状区域且生成正摄影像需要耗费大量时间,无法满足实时需求。目前,针对多幅无序影像序列进行快速自动识别拼接的技术日趋完善[5],其研究成果已广泛应用于农林、海洋、能源、铁路等各行业。如基于无人机传感器平台的铁路环境监测,可利用三维模型进行环境管理[6],将多期影像和矢量数据导入GIS库,实现区域空间分析的目的。基于无人机影像的3D模型和DOM模型,可完成复杂山区地质选线以及滑坡、断层识别工作[7]。在铁路工程建设数字化可视化管理方面,开展无人机影像和BIM技术的综合应用,可实现数字化施工和精细化管理[8]。铁路BIM设计常基于多源地理信息数据(主要为机载LiDAR和航空航天遥感数据)。然而,这些研究基本是基于静态正摄影像及三维模型,且效率较低,实时性差。
针对铁路工程用地界管理中存在的抢栽抢建、违建乱建等问题,制定了一套完整的航拍方案,包含平台选择、航带设计、外业质量控制、数据处理等,以期解决铁路建设征地过程中存在的问题。
1 石衡沧港城际铁路工程概况
石衡沧港城际铁路是京津冀城际铁路网规划中的重要线路,对于构建京津冀城际铁路网“四纵四横”主骨架,打造石家庄至周边主要城市一小时交通圈以及沧州、衡水两个地区交通枢纽,完善黄骅港集疏运体系具有重要意义。该城际铁路起自石家庄站,利用石济客专既有车站5座,经武邑、阜城、交河、泊头西、文庙至沧州西站;后经沧州北站,并行朔黄铁路向东,经吴庄站,在黄骅东与环渤海城际共站;后折向东设南大港站、渤海西站,折向南至本线终点渤海站,新建正线长237.2 km。本线为新建双线城际铁路,设计行车速度250 km/h,测区内地势平坦,地形起伏较小。设计单位分别于2016年和2017年采用UCE数码航摄仪和ALS80机载激光雷达进行了全线航飞成图。近期,工程即将进入开工阶段,因原有地形图时效性差且分辨率较低,为进行施工现场的现状调查以及用地界管理、监督抢载抢建、预防违建乱建等特殊应用,开展了此次无人机航拍。
2 全线域无人机航拍技术方案
工程施工初期,主要关注对象为全线域的基本地貌、地物和重点区域现势性变化。依据业主实际需求规划航飞方案,对沿线重点地段如禁飞区、机场、村庄、轨道交通、少数民族聚集区等进行踏勘调研。
本次航拍采用大疆四旋翼“悟”Inspire1 V2.0云台航摄传感器一体机,其单架次巡航时间为25 min左右,具有抗4级风安全飞行的能力,其飞行高度范围可覆盖30~120 m范围,飞行平台和航拍设备总重量为9.35 kg。外业飞行过程中,应依据线路走向和航飞范围规划航飞路线并选择能够安全起降的场地,其完整的技术方案如图1所示。
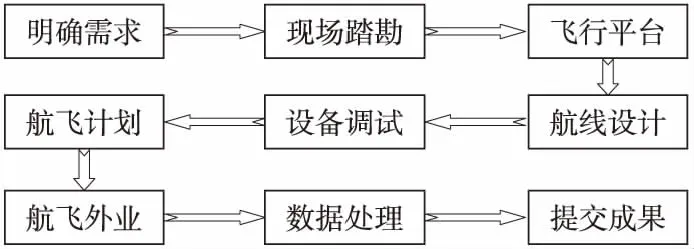
图1 无人机航拍技术方案
3 质量控制及技术要求
航摄作业范围覆盖线位地面宽度不少于100 m(线位每侧至少50 m),单航带布设。相机正下方地物的分辨率应优于1∶500比例地形图[9](GSD优于0.05 m),遇到特殊情况时(如高压塔、高速铁路桥、高建筑物等),可以适当调整飞行高度,分辨率可以适当降低。
依据国家相关航空管理规定,低空飞行拍摄的无人飞行器最大飞行高度不得高于120 m[10]。此次航飞平均相对航高为100 m,平均速度不大于5 m/s。此次航拍获取的影像清晰、色调一致;获取的视频清晰、流畅,能清晰地反映沿线地物的形状、结构及相对位置关系。
大疆无人机“悟”配备了DJI4K相机,其云台系统在获取视频素材的同时,可同步拍摄1 200万像素静态影像。系统支持录制4K@100Mbps高清视频,码率为100 Mb/s,格式为MOV,静态相机型号为FC350,相机以及摄影参数如表1所示。
该无人机机载平台可实现米级定位,满足铁路沿线的现状调查、地籍测量等工程需求。

表1 相机以及摄影参数
本次无人机航摄作业覆盖石衡沧港铁路共计约220 km,起点为衡水北,终至黄骅港,途经沧州。本项目铁路征地范围为线路左右侧各50 m。飞行效率方面,无人机单架次获取的影像和视频数据可覆盖宽200 m、长约9 km的范围。在天气允许的条件下,配备航飞外业4个小组,每个小组累计飞行5个架次,即可完成全线的数据获取工作。内业包含2名数据处理人员,4台HP-Z840图形处理工作站,整个项目经过约20个有效工作日,即可完成全部的数据获取与处理工作。
4 基于SIFT特征的全景影像拼接
影像拼接又称为影像镶嵌,是将两幅以上的影像拼接在一起,构成一幅整体影像的技术过程[11],全景拼接的过程由三部分组成(如图2所示)。其中,基于尺度不变特征转换寻找特征点(SIFT)的无人机影像匹配是拼接的基础[12],SIFT算子是一种用来侦测与描述影像局部特征的计算机视觉功能。它在尺度空间内寻找极值点,并把一幅影像映射为一个局部特征向量集,特征向量具有旋转、平移、缩放不变性,并且对光照变化、仿射变换和投影变换敏感度较低。采用无人机航拍时,很难精确计算相邻两幅影像之间的空间位置关系,容易出现各影像之间重叠度大小不一致、旋转角变化没有明显规律、影像特征经常断开等情况。因此,基于尺度特征提取的影像匹配算法是相对最适合的算法[13]。
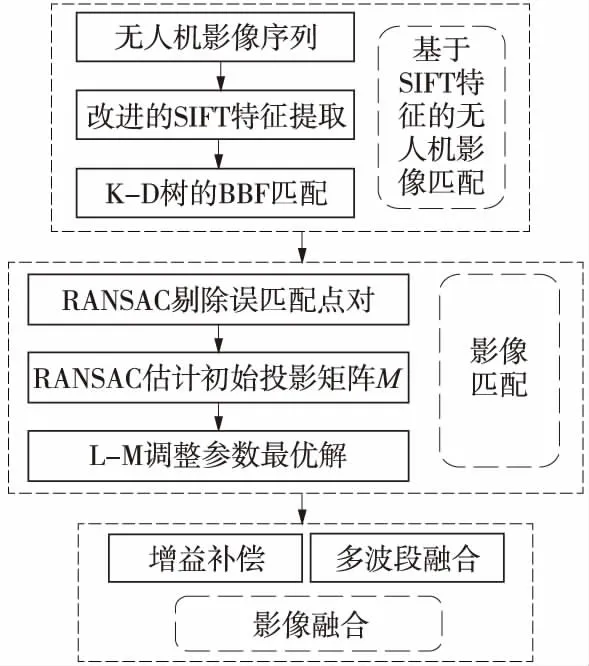
图2 全景影像拼接流程
拼接的过程还包括影像配准和影像融合两个关键环节。影像配准的目标是找出重叠区域两幅或多幅影像之间的变换关系,确立影像坐标变换模型,并将多幅影像变换到统一的坐标系下。影像配准的关键环节是求解一个8参数变换矩阵M。以下采用的变换模型为投影变换(透视变换),其模型如公式(1)。其中,M为投影矩阵,它是一个任意的3×3矩阵,M是齐次的,公式(1)可表示为公式(2),即
(2)
投影变换矩阵拥有8个自由度,配准精度高,基本适用于所有的影像配准情况,可表达复杂的相机运动,尤其适用于单视点旋转拍摄和多视点等近似平面场景[15]。
一般情况下,拍摄环境变化、视差效应、配准误差等可导致影像间存在色彩和光照差异。因此,拼接后的全景影像接缝处有明显的明暗差异,同时伴有错位现象。应采用合适的融合策略,使拼接后的影像具有视觉的一致性。
采用Matthew Brown等提出的增益补偿(Gain compensation)调整全景影像的色差,采用Burt等提出的多波段融合方法(Multi-Band Blending)调整全景影像配准误差带来的拼接缝[16]。增益补偿的主要思想是对所有影像的总增益定义一个误差函数,计算所有重叠像素的增益归一化强度误差和,即

(3)
公式(3)表达的含义为使得各重叠区域所有像素灰度差的总和最小。多波段融合是为了解决配准误差和几何错位的影响,即在增益补偿之后,影像的边缘仍然可见(如影像边缘暗淡、模糊等)。该方法的基本原理是将要融合的影像重叠区域分解成波段不同的一组影像(构建高斯金字塔),然后在不同波段的影像上,即金字塔各层上选择合适的拼接策略进行拼接,最后把所有波段的影像进行合成,从而重构出影像[17]。本项目采用自开发的软件完成拼接,全线单航线遥感影像1 054张,拼接完成需用时1 d,其静态影像全景拼接的部分成果如图3所示。

图3 全景拼接成果
5 视频编缉
航拍获取的动态视频素材需进行后期编辑才可使用,主要编辑的内容包含两方面:首先是视频的比例和色彩,其次是在视频中添加线位、里程、村庄、地标、航飞轨迹、道路、文字等工程属性信息。
编辑、合成后的视频将成为具有“地理信息和地物属性”的影视集。一般原始视频素材通过非线性编辑软件EDIUS和PHOTOSHOP进行编辑。EDIUS拥有最佳的基于文件的工作流程,具备实时,多轨,混合格式的编辑、合成、色键、字幕以及时间线输出功能[16]。而PHOTOSHOP具备图像处理功能,主要作用是搭建各类参照物。视频编辑的主要过程如下:
(1)依据施工线位制作动态航迹。首先在GoogleEarth中依据施工线位选取多帧影像,包含地物、村名、线位里程等信息,将包含工程信息的多帧影像在EDIUS软件中进行编缉。
(2)运用PHOTOSHOP软件制作航飞导航方位,飞行中的导航方位需要用文字和箭头表示,在PHOTOSHOP中保存为PGN格式,最后通过EDIUS软件合成、编缉所有的附属工程信息。
效率方面,原始4K视频数据量约176.7 GB,制作后数据量约90.2 GB,制作周期为15 d。图4为编辑后的动态视频成果,影视中左上角动态合成图片下载自GoogleEarth18级影像,其中包含线位轨迹、里程、道路、村庄信息。将全景快拼图叠加于Google中,可实现查询功能。

图4 动态视频成果
猜你喜欢
云南画报(2021年12期)2021-03-08
云南画报(2021年12期)2021-03-08
家庭影院技术(2020年11期)2020-12-28
时代邮刊·下半月(2020年9期)2020-09-23
电子制作(2019年24期)2019-02-23
金桥(2018年6期)2018-09-22
英美文学研究论丛(2018年1期)2018-08-16
小学生优秀作文(低年级)(2018年6期)2018-05-19
陕西画报(2017年1期)2017-02-11
家庭影院技术(2017年12期)2017-02-06
