
DWM1000在无人机集群中定位滤波算法的研究
2019-07-29 00:41于宙莫浩杰张靖宇马溢泽陈济轩
无线互联科技 2019年9期
关键词:定位
于宙 莫浩杰 张靖宇 马溢泽 陈济轩

摘 要:为了实现无人机集群的室内相对定位,文章特意研究DecaWave公司生产的DWM1000模块的定位和滤波算法,以确保集群在正常运行状态时获得更稳定的位置坐标信息。首先,确定多种常用的测距定位技术,通过分析与论证,最终确定TOA方式为较为稳定的测距定位方式。其次,由于测距时间会对测距误差产生影响,提出一种SDS-TWR优化测距算法,并进行相关的仿真实验来减小得到的定位数据的误差,另外该算法还可以减小时钟漂移的影响,得到更准确的数据。最后,为了消除稳态定位误差,讨论了RAIM算法剔除故障基站的方法,结合实验与仿真图进行论证,确定误差消除方案的可行性。
关键词:无人机集群;DWM1000;TOA;定位
现代科学技术飞速发展,导航定位的精度逐渐提高[1],定位的方式逐步增多,为基于相对位置定位的无人机集群技术提供了研究支持。目前,因为DWM1000的传输功率、传输数据速率和它的工作带宽都是当前测距领域的佼佼者,所以,这种技术正在被广泛地应用在各个方面,DWM 1000非常适合无人机集群定位平台的构建。
1 TOA 测距技术
到达时间(Time of Arrival,TOA)距离测量技术又称为TOF,主要测距原理是通过测量信号的传输时间来计算距离,无人机集群方面主要是测量主机发送信号到从机接收信号的时间进行测距[2]。
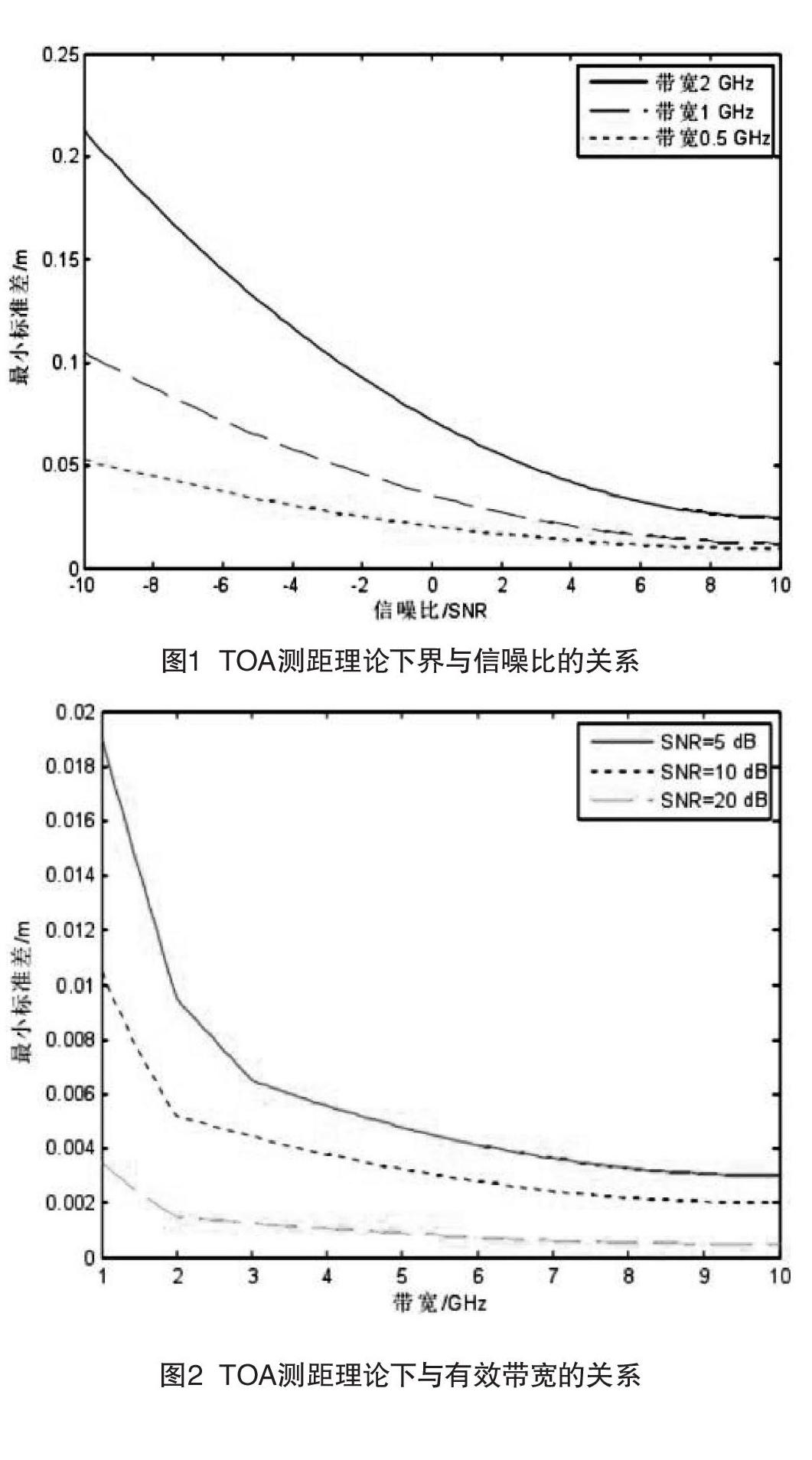
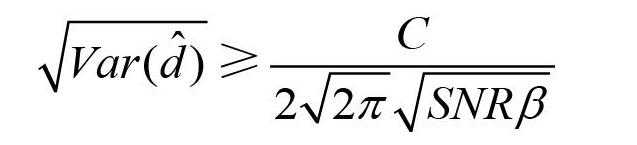
图1为TOA测距最小标准差和信噪比的关系曲线,图2为最小标准差和有效带宽之间的关系曲线。从这两个图中可以看出:增大信号的带宽是一种比较好的将最小标准差降低的方法,除此以外,通过降低信噪比也能达到这个效果,这是两种降低误差比较好的方式[3]。
其克拉美罗下限测为m:
其中,β表示传输信号的带宽,C代表光速其值取,那么可以得到:
2 SDS-TWR算法及其误差分析
本研究设计出一种新的算法来消除时延导致的误差,优化算法示意如图3所示,大致思想为两个这种相互发送信号时不立即发送应答信号,而是经过规定的一段时间重新再发送信号。
两次发送信号来回的时间间隔分别为:
其中,tround2表示对信号的发射时间进行重新发送的时间,再经过信号之间数据交换的时间,得到下列等式:
由于tround1,treplyA可以从A的定时器获得而tround2和treplyB可以从B的定时器获得,则TOF可以由上式计算得出结果:
考虑到时钟漂移的影响,测量的TOF为:
则,真实TOF与测量TOF之间的误差为:
因为tround1-treplyA远远大于TOF,则误差可以简化为:
假定treplyA=treply,Δtreply=treplyA-treplyB,则上式可以简化为:
所以设置相同的时间间隔的话,测距误差有很大可能会受到Δtreply的影响,所以时钟飘移对测距结果产生的误差可以忽略不计[4]。
3 定位误差消除
因为实验条件等因素的限制,多主机故障去除实验中设置了5个从机。在正常情况下定位误差值在30 cm左右,本次实验用物体遮挡其中一个从机的天线,将其作为故障从机使用。首先,进行无接收机自体完好性监控(Receiver Autonomous Integrity Monitoring,RAIM)算法的測距定位,记录定位结果。而后加入RAIM算法重新进行测距定位并记录定位结果,计算定位误差,所得结果如图4—5所示。
由图4可以看出,未使用RAIM算法与使用RAIM算法去除故障主机得出的定位结果相比有较大的偏差,未使用RAIM算法的测距结果与实际距离相差更大。同时由图5能够发现,加入RAIM算法去除故障主机之后的定位误差基本在18 cm以内,只有极个别的达到了27 cm以上。而未加入RAIM算法使用了错误的测距信息进行定位解算,因此,其定位误差绝大多数在40 cm以上。所以,当主机遇到突发问题或者出现不可抗的问题引发故障的时候,应该寻找另外一种算法进行故障主机检测,使测距定位结果更准确,在这里使用RAIM去除故障主机的影响来减小误差值。加入RAIM算法之后的定位算法使用了4个主机的测距数据信息进行定位,而之前未设置故障主机的定位算法使用了完整的5个主机的测距信息进行定位。从图4—5可以看出,参与运算的主机数越多,定位结果越精确[5]。
[参考文献]
[1]张亚森.基于DWM1000的UWB室内定位系统设计[D].哈尔滨:哈尔滨工程大学,2018.
[2]刘琦,沈锋,王锐.基于UWB定位系统硬件平台设计[J].电子科技,2019(10):11-12.
[3]解延春,唐佳,倪荣霈,等.基于DWM1000的超宽带室内定位系统设计[J].数字技术与应用,2016(4):187-190.
[4]俞一鸣,姚远,程学虎.TDOA定位技术和实际应用简介[J].中国无线电,2013(11):57-58.
[5]陶偲.基于UWB的室内SDS-TWR测距算法优化和定位算法融合的研究[D].武汉:华中师范大学,2016.
Abstract:In order to realize the relative indoor positioning of UAV cluster, the paper studies the positioning and filtering algorithm of DWM1000 module produced by DecaWave Company to ensure that the cluster can obtain more stable position coordinate information in normal operation. First of all, a variety of common ranging and positioning techniques are determined. Through analysis and argumentation, the TOA method is determined to be a more stable method. Secondly, a SDSTWR optimization ranging algorithm is proposed to reduce the error of positioning data, in order to reduce the influence of clock drift and get more accurate data. Finally, in order to eliminate the steady-state positioning error, the method of eliminating the fault base station by RAIM algorithm is discussed, and the feasibility of the error elimination scheme is determined by combining the experiment and simulation diagram.
Key words:UAV cluster; DWM1000; TOA; positioning
猜你喜欢
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
中国外汇(2019年20期)2019-11-25
制造技术与机床(2019年4期)2019-04-04
海峡姐妹(2018年2期)2018-04-12
知识经济·中国直销(2018年3期)2018-04-12
电子制作(2016年19期)2016-08-24
通信电源技术(2016年3期)2016-03-26
学习月刊(2015年1期)2015-07-11
中国卫生(2014年2期)2014-11-12
