
基于多目标约束的多连杆悬架优化设计
2019-07-23 09:36张鹏王洪新曹昌勇
山东交通学院学报 2019年2期
张鹏,王洪新,曹昌勇
(皖西学院机械与车辆工程学院,安徽六安 237012)
0 引言
随着汽车操纵稳定性和舒适性要求的不断提高,多连杆悬架作为车辆的后悬架被广泛采用。多连杆悬架不但能提高设计自由度,还能增加对每个方向的约束控制,在满足乘员舒适性的情况下,能更有效地提高车辆的操纵稳定性,有效减少轮胎磨损。
悬架的运动学特性与柔性(kinematic & compliance,K&C)是保证车辆舒适性和操纵稳定性的基础[1-8],其中悬架硬点坐标(悬架中决定悬架运动学特性的点)和部分关键衬套的刚度对K&C影响较大,需要在设计阶段充分考虑。在悬架优化设计时,一般先分析悬架的硬点坐标对K&C主要特性参数的影响,确定悬架的硬点坐标后,再对悬架衬套的刚度进行匹配,确保悬架满足设计要求。
本文结合在研车辆开发过程中悬架的K&C,根据多目标约束条件和悬架布置的具体要求,分析多连杆悬架的硬点坐标和衬套刚度对K&C主要特性参数变化灵敏度的影响,并对悬架的结构进行优化设计。
1 多连杆悬架模型
1.1 多连杆悬架的组成
多连杆悬架模型由悬架、稳定杆、副车架等组成。
1)悬架。悬架主要由连杆、减振器、弹簧、稳定杆等组成,多连杆悬架单侧包括1个纵臂、1个上控制臂、2个下控制臂、弹簧、减振器等。纵臂一端和转向节焊接在一起,另一端通过弹性衬套与车身相连;上、下控制臂一端通过衬套与转向节相连,另一端通过衬套与副车架相连;减振器上端与车身相连,下端连接下控制臂;弹簧上端通过弹簧座和车身相连,下端支撑在下控制臂上。
2)横向稳定杆子系统。该系统由稳定杆及拉杆组成。
3)副车架子系统。该系统通过螺栓与车身刚性相连。
1.2 悬架模型及验证
1.2.1 建模
已知整车参数、各零部件硬点坐标、弹性元件参数等,其中悬架主要硬点坐标参数和衬套刚度如表1、2所示,坐标轴x、y、z方向如图1所示。
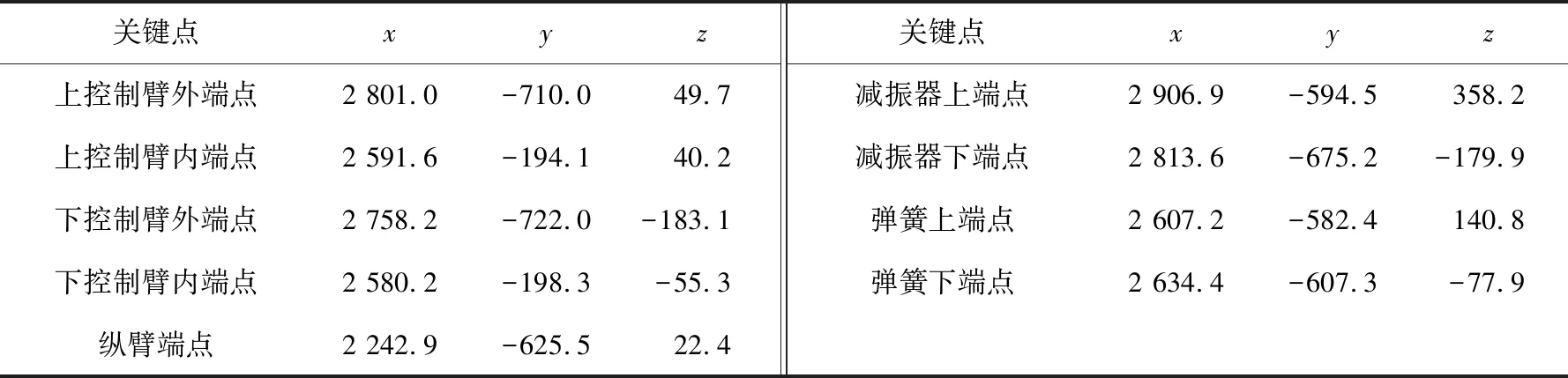
表1 多连杆悬架硬点坐标 mm

表2 多连杆后悬架衬套刚度

图1 多连杆悬架刚柔耦合多体动力学模型
汽车运行中,前后轴的抗侧倾性依靠多连杆悬架中副车架和纵臂的形变来保证,为了精确模拟副车架和纵臂在复杂运动情况下的变形情况,将其建为柔性体。采用有限元前处理软件Hypermesh通过壳单元对副车架和纵臂三维模型进行网格划分,各划分为80 372个单元和10 118个单元,其中网格单元的长度均为4 mm。焊缝选用RBE2单元进行模拟,根据模态综合法计算副车架和纵臂200 Hz内的自由模态和约束模态,导出副车架和纵臂的MNF中性柔性体文件,再将其导入 Adams/car建立柔性体模型,与Adams/car中其他刚性体部件模型一起装配形成多连杆悬架刚柔耦合多体动力学模型,如图1所示[9-13]。
1.2.2 仿真及试验验证
模拟车辆双轮同向平行跳动和纵向力加载实车试验,双轮同向平行轮跳垂直位移为-50~50 mm,纵向力为3000 N,利用Adams/car软件对图1的模型进行仿真分析;同时利用汽车悬架K&C试验台对在开发车辆悬架进行试验。仿真与试验2种情况下的车轮前束角和外倾角及轮心纵向位移的变化曲线如图2所示。
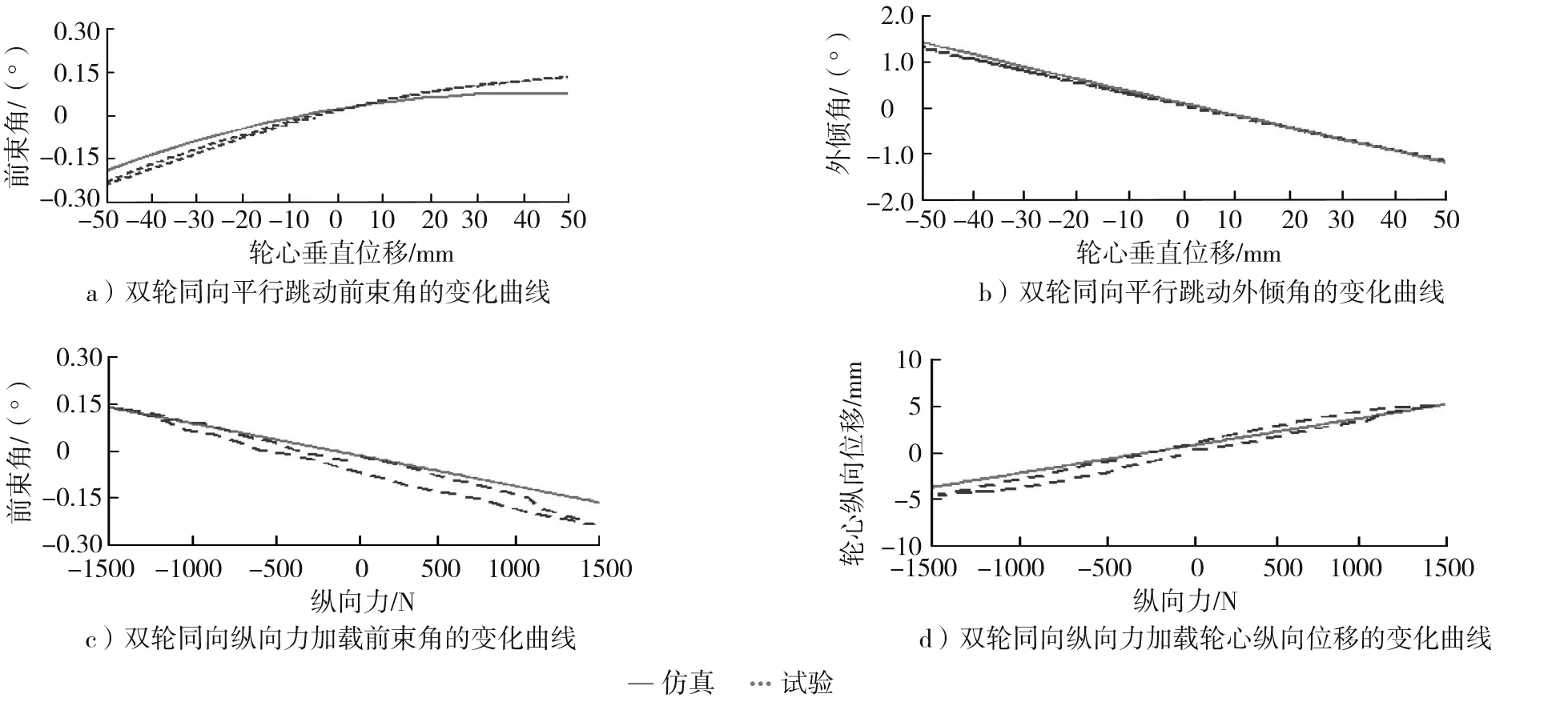
图2 模型仿真与试验测试结果对比
由图2可知:多连杆悬架刚柔耦合多体动力学模型仿真结果与试验测试结果吻合度较高,验证了所建悬架模型的正确性。
2 K&C的影响因素分析及悬架结构优化
悬架总成的K&C主要研究车轮平行跳动、车辆侧倾、转向、纵向力加载、侧向力加载和回正力矩加载等几个工况特性,每种工况下对应多项特性参数,各项K&C特性参数的重要等级特性不完全相同。本文主要分析双轮同向平行跳动及加载同向纵向力、同向侧向力及回正力矩时悬架硬点坐标和衬套刚度对车轮前束角、车轮外倾角、轮心纵向与侧向位移等悬架K&C主要特性参数的影响。
2.1 悬架硬点坐标的影响及优化
悬架结构的布局直接影响悬架的运动学特性指标,而悬架硬点坐标则是最重要的直接影响因素,本文从实际项目需求出发,结合布置的可行性和调整约束要求,分析可调的悬架关键点坐标对悬架运动学特性参数的影响,对关键硬点的坐标进行优化分析[14-20]。
2.1.1 设计变量和约束条件
从车辆布置角度出发,基于布置初始值,按初始值增减一定比例得到参数的变化范围,从而获取硬点坐标对悬架的影响。本文借用车辆原减震器结构和弹簧,不考虑调整弹簧硬点。选取上下控制臂的内外点、纵臂安装点等5个硬点的x、y、z3个方向的坐标作为设计自变量,根据工程经验,取变量的变化范围为-3~3 mm。
2.1.2 双轮同向平行跳动时悬架硬点坐标的影响
分析悬架硬点x、y、z3个方向的位移对车轮前束角与外倾角、纵向位移和侧向位移等影响K&C特性的关键参数的影响。在Insight模块中将车辆前束角、车轮外倾角、轮心纵向位移和侧向位移的最大值(绝对值)作为分析目标,应用试验设计(design of experiments,DOE)灵敏度优化方法,得到各硬点坐标对车轮前束角与外倾角、轮心纵向位移和侧向位移等参数灵敏度的影响,如图3所示。
1)图3a)中,上控制臂内端点z坐标对前束角灵敏度的贡献最大,达到63%,且为正向影响(即随着该点z坐标的增大,前束角增大);上控制臂外端点z坐标对前束角变化的灵敏度贡献率为22%,为负方向影响;纵臂端点z坐标对前束角是负影响效应,贡献率约为18%。
2)图3b)中,上控制臂和下控制臂内端点z坐标对外倾角灵敏度影响的贡献率基本相同,约为14%,但二者影响方向相反。
3)图3c)中,纵臂端点z坐标对纵向位移变化灵敏度的影响尤为明显,贡献率约为18%,且为正向影响。
4)图3d)中,上控制臂内端点z坐标对侧向位移变化灵敏度的影响最突出,贡献率约为19%,且为正向影响。

图3 双轮同向平行跳动时悬架硬点坐标对各参数灵敏度的影响
2.1.3 悬架硬点坐标的优化
测试发现,在研车辆车轮同向平行跳动时前束角变化量、侧倾转向时的前束角变化量不满足设计要求,因此对该车悬架的硬点坐标提出几种改进方案,如表3所示。

表3 悬架硬点调整方案 mm
1)方案1。纵臂安装点的坐标在x、y方向分别增加10 mm,在z轴方向减小10 mm;上、下控制臂外点坐标在z轴方向减小10 mm。但调整车身纵臂安装点需要重新开发纵臂,否则将导致侧倾中心高度和车辆抗点头率不满足要求。
2)方案2。该方案调整的硬点较多,调整范围较大,由于纵臂端点受限于车身安装结构形式和姿态,此方案需要重新调整设计。
3)方案3。综合考虑多目标约束条件,调整上下控制臂外点,重新开发设计转向节,此方案零部件改动量较小。
综合考虑多目标限制后,尽量减少零部件的结构变化,以降低研发费用[21-25]。最终该车辆后悬架硬点选择折中优化方案3,即z向降低上控制臂外端点10 mm,z向抬高下控制臂内端点10 mm。
2.2 衬套刚度的影响及优化
2.2.1 设计变量及约束条件
以轮心位置、车轮前束角变化,并综合车轮回转力矩和前束角的变化关系为目标约束条件,参考车辆悬架衬套设计原始值,通过比例进行定义缩放,控制衬套刚度为0.85~1.15倍的初始值,分析悬架衬套刚度对悬架K&C特性参数的影响。
2.2.2 不同加载方式下衬套刚度的影响
在纵向力及侧向力作用下,分析上下控制臂衬套、纵臂衬套、副车架衬套、稳定杆衬套刚度对车轮前束角和轮心位移的影响。基于ADAMS软件,通过修改衬套的刚度参数设置,分析其对车轮前束角灵敏度、轮心位置灵敏度的影响,应用DOE方法获取方案矩阵,得到各个衬套刚度对K&C参数灵敏度的影响结果如图4所示。

图4 不同加载方式下衬套刚度对各参数灵敏度的影响
由图4可知:纵臂衬套x向刚度对K&C特性参数的影响最大。随着纵臂衬套x向刚度变化量的增大,在同向纵向力与同向侧向力加载工况下,轮心位移及前束角的变化最明显。回正力矩加载时,纵臂衬套x向刚度变化时,前束角的变化较硬点坐标优化前有明显改善;同向侧向力加载时上控制臂、副车架衬套x向刚度对K&C特性参数变化灵敏度的影响较小。
2.2.3 衬套刚度优化
悬架硬点坐标确定后,测试发现,车辆轮心位置随着纵向力变化和侧向力变化的程度不满足设计要求,因此对衬套刚度进行调整,根据衬套刚度对K&C参数变化灵敏度的分析结果,结合DOE分析方法,得到衬套刚度优化结果如表4所示。

表4 悬架衬套刚度 kN·mm-1
3 悬架结构优化前后性能参数对比
利用硬点坐标和衬套刚度对K&C主要特性参数灵敏度影响的分析结果,在悬架K&C、整车操纵稳定性、生产成本等多目标的基础上有所取舍,以保证优化后各项性能参数达到设计要求。优化前后较为重要的几个K&C特性参数的仿真数据如表5所示。
通过硬点坐标和衬套刚度的优化,双轮平行跳动时的前束角变化、车辆侧倾时前束角变化、悬架侧倾中心高度、纵向力作用时的轮心位移变化以及侧向力作用下的轮心位移变化都满足设计要求。

表5 优化前后部分K&C指标结果对比
4 结论
本文对多连杆悬架硬点坐标和衬套刚度对K&C主要特性参数灵敏度的影响进行分析,以K&C满足设计要求为约束条件,对悬架各硬点坐标和衬套刚度进行优化设计。仿真结果表明:优化后悬架的K&C主要指标均满足设计要求,悬架的各项性能更趋合理,为后期整车性能的达标提供了基础。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
科学咨询(2021年31期)2021-12-29
汽车零部件(2021年7期)2021-07-29
装备制造技术(2020年2期)2020-12-14
中国铁路(2020年7期)2020-10-09
探索科学(学术版)(2019年11期)2019-06-16
汽车实用技术(2018年20期)2018-10-26
民用飞机设计与研究(2018年1期)2018-05-04
北京汽车(2018年2期)2018-05-02
中国设备工程(2018年7期)2018-04-21
