视频与雷达数据融合在围界入侵报警的应用探讨
2019-07-17 01:23:30黄海
智能建筑与智慧城市 2019年6期
黄海
(中国航空规划设计研究总院有限公司 民航工程设计研究院)
1 引言
机场周界以及区域防护系统目前已存在多种监控报警方式,例如通过微波雷达对射防护、视频监控防护、红外对射防护、泄漏电缆防护和震动电缆防护等,单一方式的监控方式加联动具有一定的缺陷,因得到的信息不全面,使用当中误报现象多。为此考虑由毫米波雷达、枪型摄像机探测信息融合,通过雷达回波检测运动目标位置,取得目标的距离与方位信息;枪型摄像机识别运动目标类型,取得目标的方位与高低信息。再进行数据融合取得目标的三维运动信息,通过直观的可视监控画面实时显示告警点位及其在线视频,籍此实现精准的运动跟踪与行为识别,提升管理水平和效率。同时,监控设备自身的安防报警或补盲采用球机和三鉴探测器组合。球机实现180°的全视角监视,在作为运动目标识别与跟踪作用之外,由三鉴探测器报警进行自身周边动目标靠近的监视、记录与联动报警。
2 机场周界入侵报警设备应用问题
从实践经验来看,目前在机场周界上使用的各类探测技术,需要根据不同的生态环境、物理条件、地形地貌、气象气候条件和相关行业规范等综合考虑。
张力围栏探测技术:对狂风、暴雨等极端天气情况不敏感,缺点一是建设成本较高;二是对维护要求较高,处于拉紧状态下的张力丝在使用过程中会逐渐松动,需要不断地动态调节;也不适用于单围界机场。
泄漏电缆探测技术:可按任意形状周界轮廓铺设,方便实用,适用于部分特殊区域如砖墙围界区域。缺点一是泄漏电缆埋设处需要4m~5m的无人区,否则容易误报;二是对周围环境变化较敏感,例如地下暗河等都可能会有影响。
振动电缆、振动光缆:应用压敏检测及光纤干涉仪的技术,适用性广,施工便利,但是对附着物(周界围栏)的稳固性要求较高,需要获取气象系统数据,否则大风、大雨天气都会有较大影响,导致误报率和虚报率增高。
红外对射探测技术:易建造、时间短、安装灵活,缺点是野外误报率较高,稳定性差,长时间使用后性能下降快,适用于临时性的围界防护。
惯性振动探测技术:国内发展起来的技术,适用性广,施工便利。目前国内有少数机场使用了该技术。其主要问题是厂商变化较快,持续服务的稳定性不足。
智慧墙探测技术:国内发展起来的技术,适用性广,施工便利。目前国内极少数机场使用了该技术。其主要问题是产品有待应用考证,厂商单一,持续服务不确定性大。
从使用现状看,没有绝对意义上最好的手段,也不存在绝对无缺陷的探测技术。各种探测技术都有其自身的特点。
3 基于多数据融合的入侵报警思路
在现有条件下,分析各个技术的优点加以合成是一种可行之道。采用毫米波雷达和视频摄像机组合系统,期待能够克服机场围界安防现状技术问题。
毫米波雷达工作频率在30GHz~100GHz,产生波长在1mm~10mm之间的电磁波,通过对目标物发送电磁波并接收回波来获得目标物体的距离、速度和角度,通过多普勒偏移的原理还可以实现高精度的目标速度探测,受光照和天气因素影响较小,测速测距精度高,全天候全天时工作,但难以识别人车等入侵目标的特征元素。
摄像机可以识别不同的物体,可以实现车辆行人的目标的特征元素识别,准确度高,同时也可以根据目标在图像中的像素大小来估算目标的距离,但作用距离和测距精度不如毫米波雷达,并且容易受光照、天气等因素的影响。
针对上述特点,收集摄像机和毫米波雷达分别对观测目标的数据,然后对各传感器的输出数据进行特征提取与模式识别处理,并将目标按类别进行准确关联,利用融合算法将同一目标的所有传感器数据进行整合。
首先进行传感器之间的时间、空间同步。
空间融合:建立雷达坐标系、三维世界坐标系、摄像机坐标系、图像坐标系和像素坐标系之间的坐标转换关系,进行多传感器数据的空间融合。由于前向视觉系统以视觉为主,将雷达坐标系下的测量点通过坐标系转换到摄像机对应的像素坐标系下实现多传感器的空间同步。
根据转换关系,得到雷达坐标系和摄像机像素坐标系之间的转换关系,完成空间上雷达检测目标匹配至视觉图像。并在此基础上,将雷达检测对应目标的运动状态信息输出。
时间融合:雷达和视觉信息传感器在时间上同步采集数据,实现时间的融合。根据毫米波雷达功能工作手册,其采样周期为50ms,即采样帧速率为20帧/s,而摄像机采样帧速率为25帧/s。为了保证数据的可靠性,以摄像机采样速率为基准,摄像机每采一帧图像,选取毫米波雷达上一帧缓存的数据,即完成共同采样一帧雷达与视觉融合的数据,从而保证毫米波雷达数据和摄像机数据时间上的同步。
完成信号级融合后,即视觉和雷达传感器微机控制器传出的数据源进行融合。再进行综合可信度加权,配合精度标定信息进行自适应的搜索匹配后融合输出;完成以视觉为主体,将雷达输出的整体信息进行图像特征转化,然后与视觉系统的图像输出进行融合。
4 系统组成与信息交互
以毫米波雷达与枪式摄像机为检测前端,球型摄像机作为辅助,光纤通信网络为传输通道,计算机与智能视频分析软件为处理核心,大容量数据服务器与可视监控管理软件为交互平台,通过直观的可视监控画面实时显示告警点位及其在线视频。
系统内部的各个单元模块之间存在着控制信息、数据信息的交互;整个系统也与其他设备或系统之间有着控制信息、数据信息的交互。系统构成,系统内部交互关系及系统外部交互关系见图1。
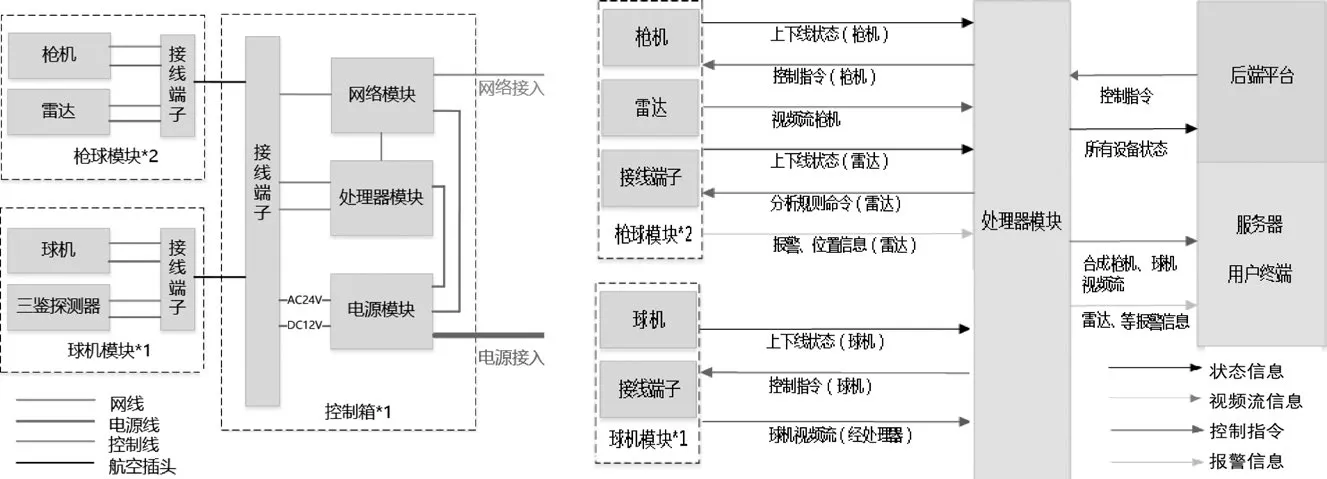
图1 系统的物理连接关系、内部信息交互图
系统实施目标识别与跟踪定位,输出目标速度、角度位置与距离信息,控制高速球机主动跟踪目标,并通过主动调焦取得任意方向不同距离目标的图像细节。
联动代码(省略)。
5 工程设计
控制箱模块、球机模块和枪雷模块安装在周界的立杆上。控制箱模块包括处理主机,处理主机分别与毫米波雷达、枪机和球机模块电连接;控制箱模块还包括报警转换器,处理主机和报警转换器电连接,报警转换器与红外报警器电连接。
另外,控制箱模块还包括:光敏传感器,光敏传感器与处理主机电连接;交换机和服务器,交换机和服务器电连接,交换机与处理主机电连接;电源组,电源组与处理主机电连接。
控制箱模块、枪雷模块和球机模块从下至上依次安装于立杆上。枪雷模块的俯仰角度不小于12°(见图2)。
立杆安装在周界内侧;立杆高度一般为3.5m~4m;每个立杆之间的距离100m~140m左右。

图2 设备安装
周界内设备立杆和控制箱应在接线井半径2m范围以内,具体安装位置根据现场情况确定。所有数据线和电源线进入控制箱后均先接避雷防浪涌装置。
信号传输:摄像机数据线通过现场安防控制箱中的工业交换机接入整个机场隔离区围界安防环网中,连至隔离区围界安防系统设备用房。本段可设置为一个独立的光纤通信环网,也可纳入就近既有的联网环网。
应用效果见图3:

图3
6 结束语
1)毫米波雷达、枪型摄像机、联动球机协同工作,进行较远距离的大视角扇形区域的可视化监视,能达到全天候、全天时、远距离、高精度的运动目标识别、报警与跟踪的安防功能。可以在机场围界较为空旷的一侧使用。
2)鉴于机场运行安全,毫米波雷达频率选择可使用ISM 频段,应取得民航管理局以及机场运营部门的使用意见。
3)智能化的、可靠的机场周界安防技术应大大减轻执勤人员的工作强度。
猜你喜欢
新能源科技(2022年8期)2022-11-22 10:02:10
新能源科技(2021年12期)2021-04-02 21:02:11
水上消防(2020年3期)2020-07-25 02:36:20
铁道通信信号(2019年7期)2019-10-08 08:38:12
铁道通信信号(2018年3期)2018-04-19 02:32:48
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
珠江水运(2016年21期)2016-12-08 05:36:05
电测与仪表(2016年12期)2016-04-11 12:28:12