
Ansys-Workbench软件在电机绝缘骨架变形仿真中的应用
2019-07-17 07:52江胜军
日用电器 2019年6期
江胜军
(珠海格力节能环保制冷技术研究中心有限公司 珠海 519070)
引言
随着变频空调的逐渐普及,变频空调的核心部件变频压缩机得到大批量的应用。因此变频压缩机中的变频电机绝缘骨架强度设计尤为重要。作为变频电机中唯一承载受力的绝缘骨架,骨架强度直接影响压缩机电机寿命。本文通过对变频电机绝缘骨架强度仿真验证,得出一些设计思路提升变频电机绝缘骨架强度值。
1 Ansys workbench软件仿真介绍
ANSYS Workbench的分析系统中包含(Analysis System)部分包含了各种已经设置好的分析类型(如显示动力分析、FLUENT流体分析、结构模态分析、随机振动分析等),绝缘骨架变形仿真项目中重点关注骨架结构在绕线作用力下的变形量及结构强度,需要用到静态结构分析及瞬态动力结构分析。
1.1 静态结构仿真分析
静态结构仿真分析用于计算固定不变载荷作用下的效应,不考虑惯性和阻尼的影响,如结构随时间变化载荷的的情况等。静力分析用于计算由那些不包括惯性和阻尼效应的载荷作用于结构或部件上引起的位移、应力、应变和力等。假定载荷和响应是不变的,即假定载荷和结构的响应随时间的变化非常缓慢。静力分析所施加的载荷包括:外部施加的作用力和压力、稳态的惯性力、位移载荷、温度载荷等。
仿真分析过程:建立有限元模型→设置材料属性→(组件需要定义接触区域,零件无需)→定义网格控制并划分网格→施加载荷和边界条件→设置分析类型和求解选项→求解→后处理。
1.2 瞬态场动力学分析
瞬态动力学分析用于分析确定承受任意随时间变化载荷的结构动力学响应。与静力分析不同,动力学分析要考虑随时间变化的力载荷以及它对阻尼与惯性的影响,利用瞬态动力学分析可以确定结构在静载荷、瞬态载荷和简谐载荷的随意组合下随时间的位移、应变、应力及力。结构动力学分析包括:模态分析,谐响应分析,随机振动分析,瞬态动力学分析。另外,若载荷与时间的相关性不重要这可以选择静力学分析替代瞬态分析。
仿真分析过程:建立有限元模型→设置材料属性→(组件需要定义接触区域,零件无需)→定义网格控制并划分网格→施加载荷和边界条件→设置分析类型和求解选项→求解→后处理。
瞬态动力学分析与静态场分析的流程基本一致,只是在定义分析类型设置求解选项时增加了时间步长的相关设置。
2 变频压缩机电机绝缘骨架模型
根据变频电机特点,设定以下两款绝缘骨架模型,如图1~2,并分别对两个骨架模型进行最大变形量仿真分析。
3 绝缘骨架静态场下最大变形量特点及仿真研究
电机生产过程中,骨架结构中受绕线过程作用力变形最大的位置是齿部,仿真过程重点关注齿部结构变形量及强度,为简化仿真过程,将骨架受力模型简化与实际载荷作用相同的集中载荷,作用于骨架齿部,采用静态场分析模块分析此载荷作用下的骨架齿部变形及强度。
3.1 齿部变形量特点(更改结构设计参数下)
骨架齿部由于定子铁芯齿部形状限制及绕线嘴绕线动作轨迹限制其形状及最大厚度基本确定,影响齿部结构强度的除了材料本身就是齿部的斜度及齿根部的过渡圆角,本次仿真过程分别通过改变内圆柱壁拔模斜度及齿根部过渡圆角尺寸仿真了骨架。
3.1.1 内圆柱壁拔模斜度变化下齿部变形特点(见图3~4)
从仿真结果来看,斜度从0 °到4.5 °增加的过程中,齿部最大变形量是不断增大的,但是最大应力呈现先减小后增大的趋势。
3.2 齿根过渡圆角变化下齿部变形特点(见图5~6)
从仿真结果看,骨架齿部过渡圆角(从0 °到3.5 °)逐渐增大,齿部最大变形量逐渐减小,最大应力也逐渐减小,基本呈线性关系。
4 绝缘骨架约束条件变化下骨架变形量特点及仿真研究
Workbench里的模型约束条件大致可以分为完全约束(即固定约束Fixed Support)和不完全约束(如Frictionless Support、Remote Displacement等)两大类,在骨架仿真的过程中,约束方式的选择是影响形变准确性的关键因素之一。
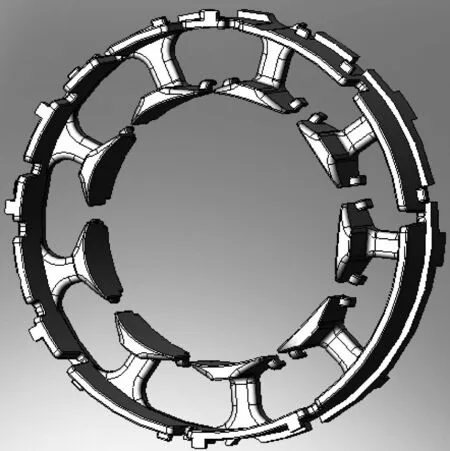
图1 绝缘骨架1#
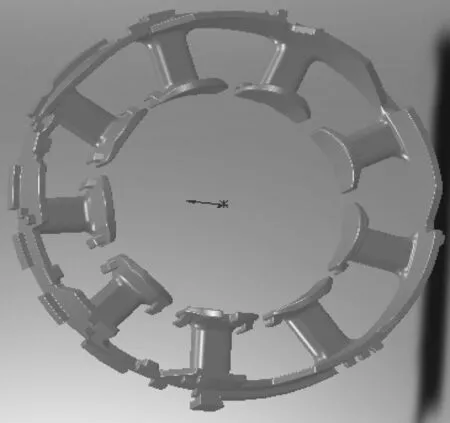
图2 绝缘骨架2#
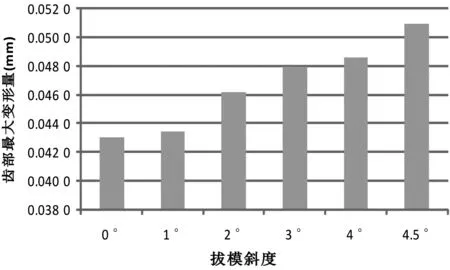
图3 1#绝缘骨架齿部最大变形量—拔模斜度关系

图4 1#绝缘骨架齿部最大应力—拔模斜度关系
绝缘骨架受力模型中的约束来自于与之配合的各个零部件。骨架与定子铁芯的配合是通过骨架上的定位小柱子或者外壁定位柱实现的,各个配合面约束的自由度不尽相同。从整体来看配合面都可以认为是完全被约束(Fixed Support),但各个配合面若忽略摩擦力的作用则可简化为只是约束了配合面法向自由度(Frictionless Support)。
通过在模型2定子的骨架模型上进行不同约束条件下的仿真对比得到如下结果:
4.1 无摩擦约束仿真(见图7~9)
4.2 底面固定约束仿真 (见图10~12)
4.3 仿真数据汇总(见表1和表2)
4.4 结果分析
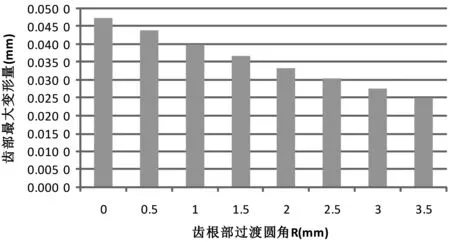
图5 1#绝缘骨架齿部最大变形量—过渡圆角关系

图6 1#绝缘骨架齿部最大应力—过渡圆角关系

图7 2#骨架无摩擦约束变形量云图
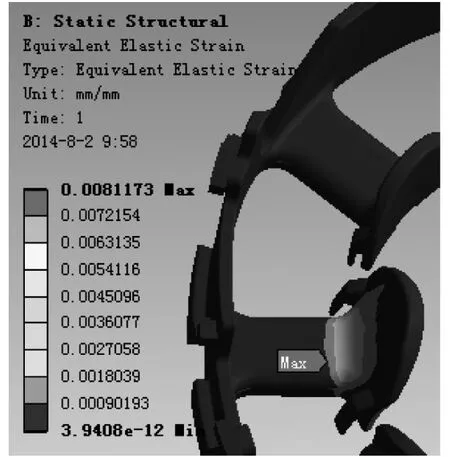
图8 2#骨架无摩擦约束应变云图

图9 2#骨架无摩擦约束应力云图
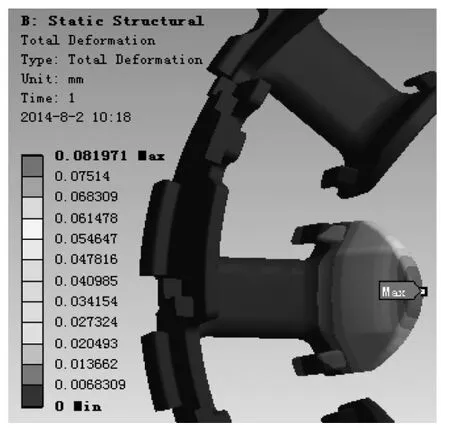
图10 2#骨架固定约束应变云图
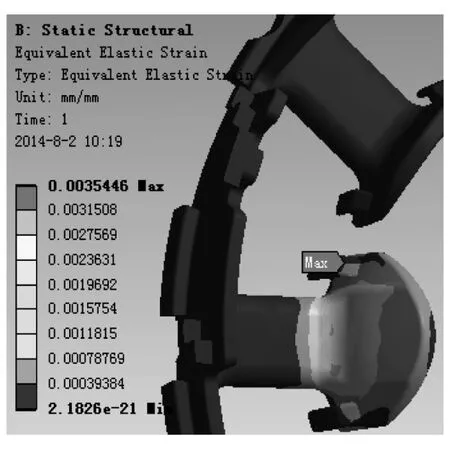
图11 2#骨架固定约束变形量云图
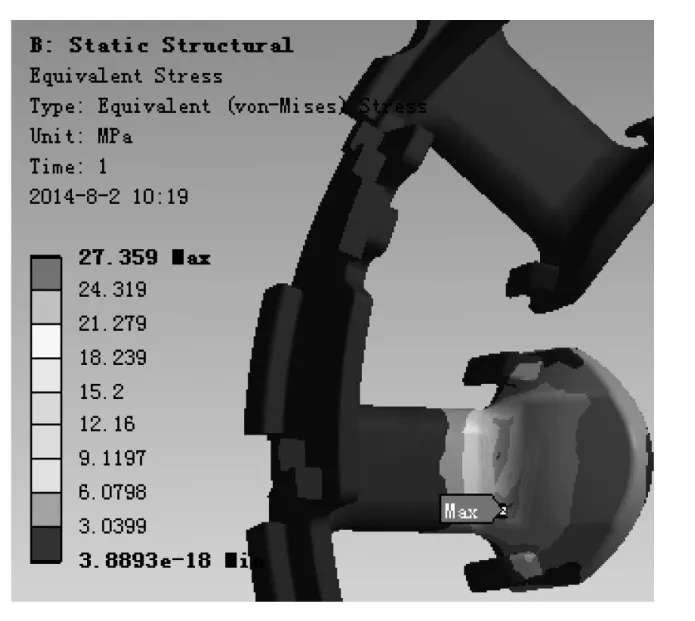
图12 2#骨架固定约束应力云图
更改约束类型为无摩擦约束,变形量增大明显,2#骨架同比增加11.3 %,另外无摩擦约束变形分步情况更接近设计分布情况,实际上绕线过程中骨架齿部变形的方向主要是定子径向方向,轴向方向有线圈束缚着基本可以认为无变形。所以后续骨架齿部变形量仿真建议采用无摩擦约束。
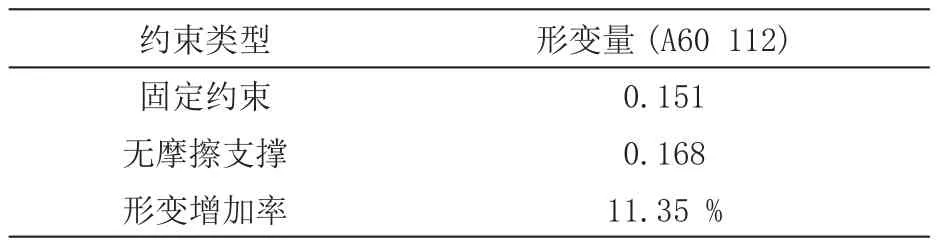
表1 不同约束仿真变形量汇总

表2 实测变形量
5 结论
通过对不同型号定子的绝缘骨架进行静态场仿真,重点关注影响定、转子装配的齿部变形量部分,得到了齿部内壁拔模斜度、齿根过渡圆角、定位方式对变形量的影响趋势,可以健全目前对绝缘骨架齿部强度的评价手段,从而可以通过后续结合定子槽满率的要求确定过渡圆角的最佳尺寸。
猜你喜欢
防爆电机(2022年2期)2022-04-26
电子乐园·上旬刊(2022年5期)2022-04-09
电子技术与软件工程(2021年8期)2021-06-16
汕头大学学报(自然科学版)(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
中国新技术新产品(2020年5期)2020-05-06
现代职业教育·职业培训(2019年10期)2019-01-06
北京航空航天大学学报(2017年8期)2017-12-20
北京航空航天大学学报(2017年9期)2017-12-18
农业工程技术·温室园艺(2017年3期)2017-07-13
