一种智能汽车竞赛的灯塔检测及路径规划方法
2019-07-15 01:37杨超刘晨晖杨肖赵春锋汪敬华
现代计算机 2019年15期
杨超,刘晨晖,杨肖,赵春锋,汪敬华
(上海工程技术大学工程实训中心,上海 201620)
0 引言
全国大学生“恩智浦”杯智能汽车竞赛由教育部高等教育司委托教育部高等学校自动化类专业教学指导委员会主办、以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动。该竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。2018年第十三届“恩智浦”杯智能车竞赛中,设立信标对抗组竞赛。本文分析了智能汽车如何识别特定的信标灯塔,并给出了相应的有效路径处理方法。
选手制作的车模开始位于发车区域内,此时所有的信标都是熄灭状态。开始比赛后,比赛系统自动会启动第一个信标,信标会发送声比赛计时控制系统发车区光导引信号。此时选手的车模能够识别确定信标的方位并做定向运动。当车模上安放的磁标进入信标附近的感应线圈后,比赛系统会自动切换点亮到下一个信标,车模随机前往第二个点亮的信标。此过程将会依次进行10次左右。最终比赛时间是从当一个信标点亮,到后一次信标熄灭为止。比赛场地示意图如图1所示。
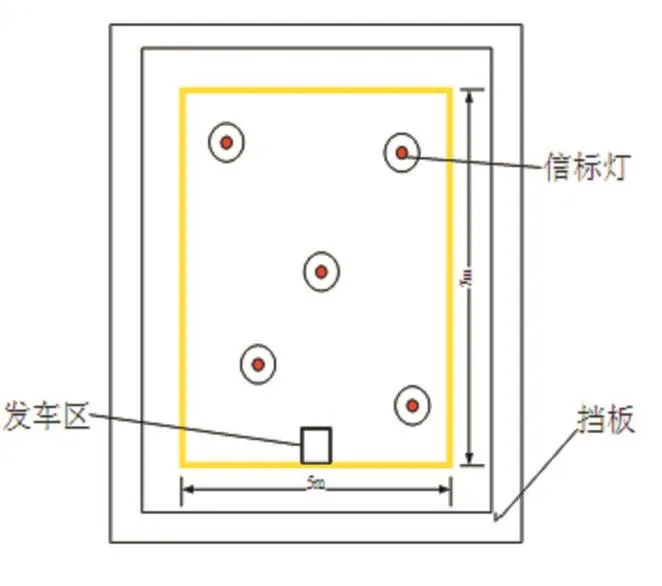
图1比赛场地示意图
1 系统概述
智能车的整个系统分为为机械结构、控制模块、控制算法等三部分。智能车的工作模为:摄像头采集赛场上的图像输入单片机K60,经过图像二值化处理确定闪亮的信标灯的坐标位置,K60输出相应的PWM信号到舵机,控制舵机打角使车模转向进入寻迹状态,左右后轮分别安装光电编码器,实时反馈脉冲信号到K60,K60经过FTM模块正交解码得到左右后轮的转动状态,进而使用PID控制算法对车速进行控制,控制途径为通过PID控制算法计算出正确的车速,再由K60输出相应的PWM信号到半桥驱动器IR2104。通过以上过程实现了智能车的闭环控制,完成整个比赛过程。图2为系统概述流程示意图。
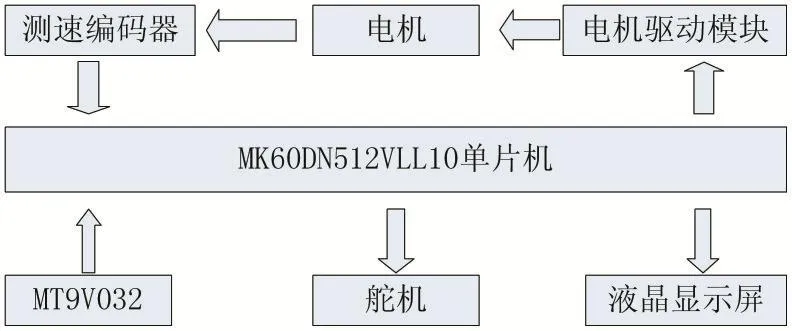
图2系统概述流程图
2 信标灯塔及引导信号
信标灯机械部分由三部分组成:白色圆柱形灯罩、金属底座、固定底盘。圆柱形灯罩为白色熟料,可以透彻灯罩中的红色和红外光线。金属底座固定在底盘上、支持灯罩。比赛场地内的蓝色背景布铺设在底盘上面,底盘的厚度在3到5毫米之间。信标灯塔如图3所示。

图3信标灯塔
“恩智浦”杯智能汽车竞赛组委会为了拓展广大参赛学生的思想深度及增加竞赛的多元性,使得信标灯塔有了多种信号组合的多种方式的引导方式。信标灯塔在点亮后会同时发送10Hz的红色与红外信号。信标灯塔红光与红外信号波形如图4所示。
3 引导信号信息提取及路径规划策略
3.1 赛道信息提取
由于需要采集整个赛道场地的信息,故选择了可以监测视野广阔的全局摄像头MT9V032来采集场地信息。MT9V032拍摄一帧图像的大小为180×120个灰度(0-255)像素点,设置的参考帧率为50帧/秒。图5所示为MT9V032摄像头输出时序图。
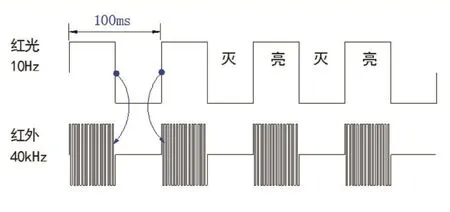
图4信标灯塔红光与红外信号波形图
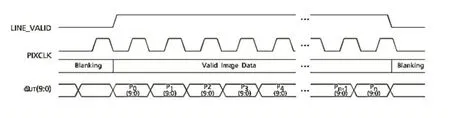
图5 MT9V032输出时序图
3.2 二值化处理
由于MT9V032采集到的是灰度值范围为0-255的灰度图像,灰度图像在能还原赛场环境。灰度图像含有赛场环境较为复杂的信息,需要对灰度图像再进行二值化处理,即将复杂的图像简化。将256个亮度等级的灰度图像通过选取适当的阈值后使得所有小于该阈值的像素点为黑色,则所有大于上述阈值的像素点为白色,所以最终的图像为一幅黑白二值图像。然而赛场环境很复杂包括光线亮度不同,二值化阈值也不尽相同。所以图像处理中二值化阈值的选取非常重要。另外采用实时调节阈值算法,从而更好地适应赛场环境,减小其他的干扰。图6为图像二值化示意图。
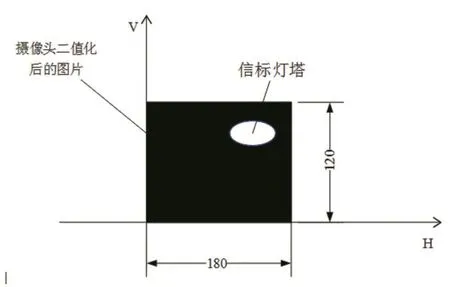
图6二值化图像
3.3 信标灯塔位置计算
通过采集信标灯塔发出的红外信号来提取目标。为了滤除其他波段的光线,在摄像头的镜头内侧加入了红外滤光片,再通过选装偏振片或调节二值化阈值的大小滤除赛道反光干扰,即可得到一个不规则的圆形光斑。圆形光斑通过逐行逐列扫描120行×180列的图像,记录并存储白色像素点。对于圆形光斑,可以采用图像简化的方法,通过选取圆形光斑最宽行、最宽行的中间列,确定出圆斑中心点,从而把圆斑简化为一个白点。由此算出的信标灯塔的代替点较为稳定,且不易跳动,且跳动范围仍在信标灯大概中心范围内。图7为信标灯塔位置计算示意图。
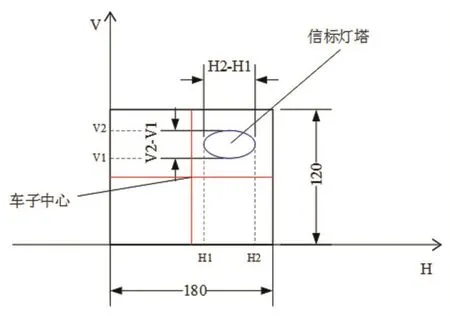
图7信标灯塔位置计算
3.4 路径规划策略
信标场地不同于传统的赛道组,没有明确的路径指向性,只能以点亮的信标灯塔作为大致的循迹方向,后来考虑到路径正对信标灯塔中心时会因为车速过快而撞上和最短路程原理,所以采用了最近路程切入线圈灭灯的绕行方式。绕行灭灯方式如图8所示,1或2路径均可,但考虑到最短路径,最优路径应为1号路径。
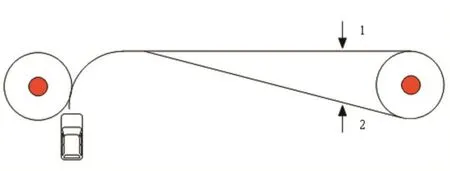
图8绕行灭灯方式
4 结语
如何精确地检测点亮的信标灯塔并迅速控制小车向着最短的路径灭灯对于信标对抗赛整体速度的提高有着非常重要的作用。本文所述的信标灯塔检测方法及最短路径规划在第十三届“恩智浦杯”智能汽车竞赛中得到实际的应用并取得了一定的成绩,经检验为一种有效的检测信标灯塔、合理规划路径的方法。
猜你喜欢
舰船科学技术(2021年7期)2021-08-11
金桥(2020年12期)2020-04-13
文苑(2019年24期)2020-01-06
汉语世界(The World of Chinese)(2018年5期)2018-11-24
经营者·汽车商业评论(2016年5期)2017-11-30
现代电子技术(2017年11期)2017-06-12
琴童(2016年12期)2017-01-16
发明与创新·大科技(2016年5期)2016-05-17
现代电子技术(2014年19期)2014-10-17
现代营销·经营版(2013年10期)2013-05-14