
基于并行传输网络模型的声学参数测量仪器
2019-07-12 06:13王毛毛丁鹏飞牟锦鹏
西安邮电大学学报 2019年2期
法 林, 王毛毛, 梁 猛, 丁鹏飞, 牟锦鹏, 张 琦, 范 瑾
(西安邮电大学 电子工程学院, 陕西 西安 710121)
声学测量是许多领域中的一种非常重要的技术。声学测量技术在移动和互联网通信中的应用涉及到无线传感器网络等[1-2],在地球物理科学及相关领域也很重要应用,如地下矿产资源(包括石油,天然气,煤炭,金属矿石等)的勘探[3],地下岩层地应力的测量[4],大坝损害和自然灾害的预警[5-10]等。在生物科学中,声学测量的应用也同样广泛,包括血管内超声[11],医学成像[12]、生物识别[13],植入式微器件[14]等。声学测量也广泛用于日常生活和一般工业,包括测距仪[15],无损检测[16-17]等。针对不同的实际用途,开发了各种用于特定研究和应用的声学测量仪器,例如用于声学横向位移的实验验证[18]以及检查在层状各向同性/各向异性介质中传播的声波的特定极化状态等[19-20]。但是,在大多数的声学测量过程中,人们很少考虑换能器的电-声/声-电转换对测量的声信号子波的影响。而利用基于严格物理机制的声学测量仪器进行精确测量是对测量的声信号子波进行正确分析和反演的基础。
本文报道一种基于声学并联传输网络模型的多功能声学测量系统,用于精确的声学测量。通过该系统,可以获得各种物理量之间的关系,即驱动电信号子波、换能器电-声/声-电转换、传媒介质和测量的声信号等物理量之间的关系。在理论上,该测量系统依据傅里叶变换和线性叠加原理,建立了声学测量过程的并联等效电路模型。在技术上,采用了高分辨率和高采样率的模数转换器(analog to digital converter,A/D)来实现数据采集。系统的采样率范围为500 KS/s到15000 KS/s,分辨率范围为16位到24位。作为一个应用实例,基于并联连接的等效电路网络模型[18,21],并使用声学测量系统测试了压电球形薄壳换能器的瞬态响应关系,验证测量结果与理论预测的一致性,测试系统质量和技术功能。
1 理论基础
采用径向方向上极化、电极连接到内/外表面的压电薄球壳换能器作为例子来进行分析和讨论。假设换能器的平均半径和薄壳厚度分别为rb和lt。由于球面半径远大于薄壳的厚度,可近似认为r0≈r1≈rb,且rb=(r0+r1)/2,其中r0和r1分别为球壳换能器的内、外半径。对于正弦振动的压电换能器,可以求解压电和运动方程,建立相应的等效电路如图1所示。两个等效电路由电子元件和机械元件构成,在图1中U1(t)为驱动电压信号,Ro为其输出电阻,Ri为测量电路的输入电阻,V(t)是声源换能器电学端的电压信号;U3(t)是接收换能器电学端的电压信号,mr、Rr、Cm、m、Co、N和Rm分别是换能器的辐射质量、辐射力阻、柔顺、质量、箝位电容、机-电转换系数和摩擦力阻,vr(t)是换能器表面的振动速度。
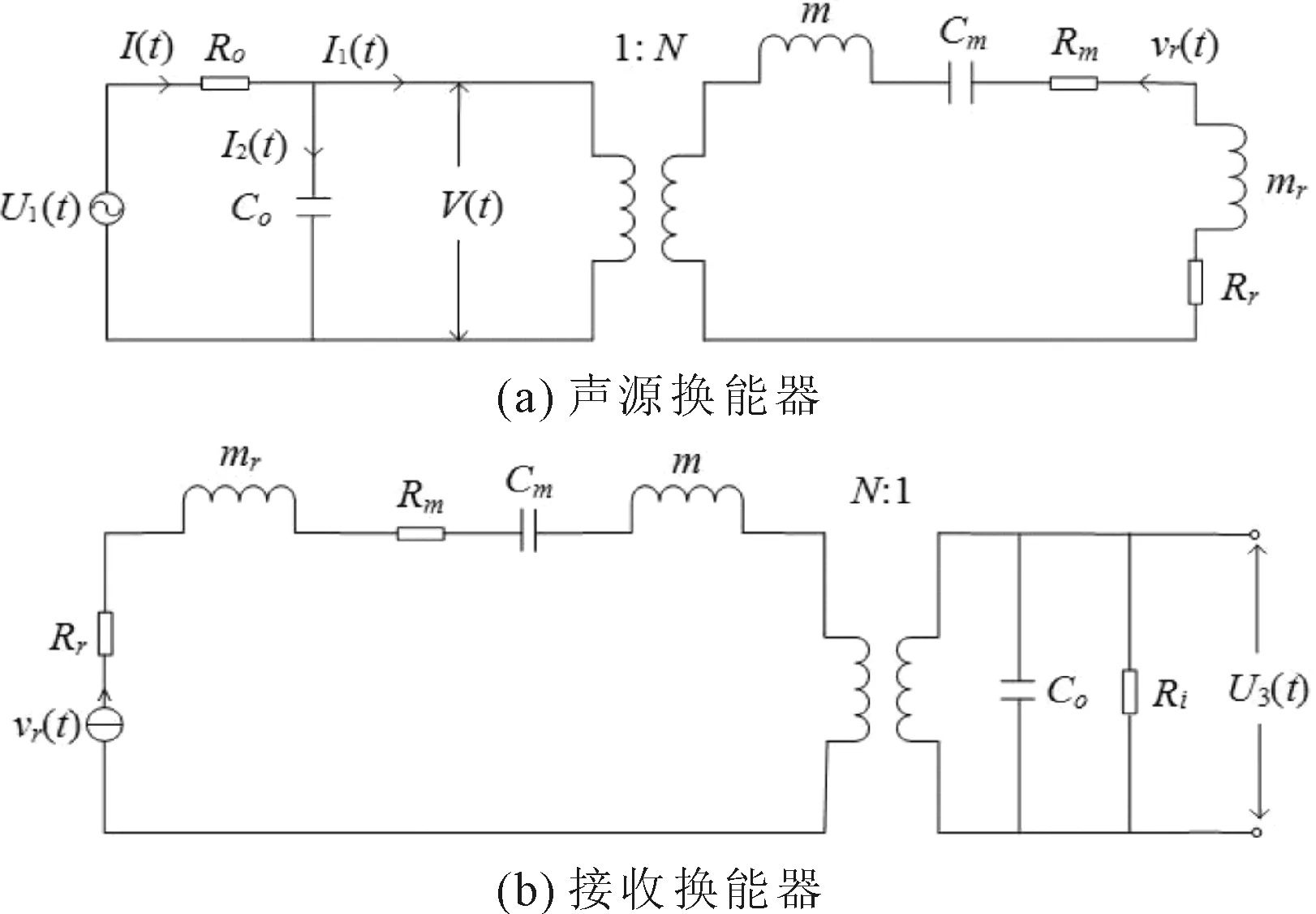
图1 正弦振动的薄球壳压电换能器的等效电路
对于正弦振动换能器的等效电路,应用留数定理,可以得到换能器的电-声和声-电冲激响应[21]如下
h1(t)=A1exp[-α1t]+
B1exp[-β1t]cos(ω1t+φ1),
(1)
h3(t)=A3exp[-α3t]+
B3exp[-β3t]cos(ω3t+φ3),
(2)
式中:系数A1、α1、B1、β1和φ1分别表示声源换能器电-声冲激响应的直流项幅度、阻尼系数和交流项幅度、阻尼系数及初相角;A3、α3、B3、β3和φ3分别表示接收换能器声-电冲激响应直流项幅度、阻尼系数和交流项幅度、阻尼系数及初相角。由于图1所示的等效电路是通过对于时谐函数的时间变量降阶(把时谐函数对时间的求导变为时谐函数和jω的相乘)而获得的,且在等效电路中的两个力学元件辐射阻Rr和辐射质量mr是频率的函数。所以,式(1)和(2)仅适用于换能器被正弦电信号激励的情况。然而,对于大多数情况,激励声源换能器的电信号或到达接收器换能器的声信号是包含许多频率分量的信号子波。当具有许多频率分量的电/声信号子波激发换能器时,换能器的力学端/电学端输出(辐射的声信号/测量的声信号)也由许多正弦频率分量组成。根据傅立叶变换,激励换能器的电/声信号可以表示为具有不同频率、幅度和初相位的正弦波分量的线性叠加。因此,换能器的电-声/声-电激励过程可以用一个并联网络来描述。该并联网络由许多电-声/声-电转换等效电路组成,如图2中的第一部分和第三部分所示。图中U1(t)和U3(t)定义如图1,h1j(t,ωj)和h3j(t,ωj)分别表示换能器对应第j个频率的分量电-声和声-电转换冲激响应;h2j(t,ωj)为被测物体/介质对应声信号中的第j个频率分量的声学冲激响应;vr3j为到达接收换能器的声信号子波中的第j个频率分量的振动速度。由于每个等效电路中都具有不同的辐射阻和辐射质量,因此具有自己独特的电-声/声-电转换冲激响应。
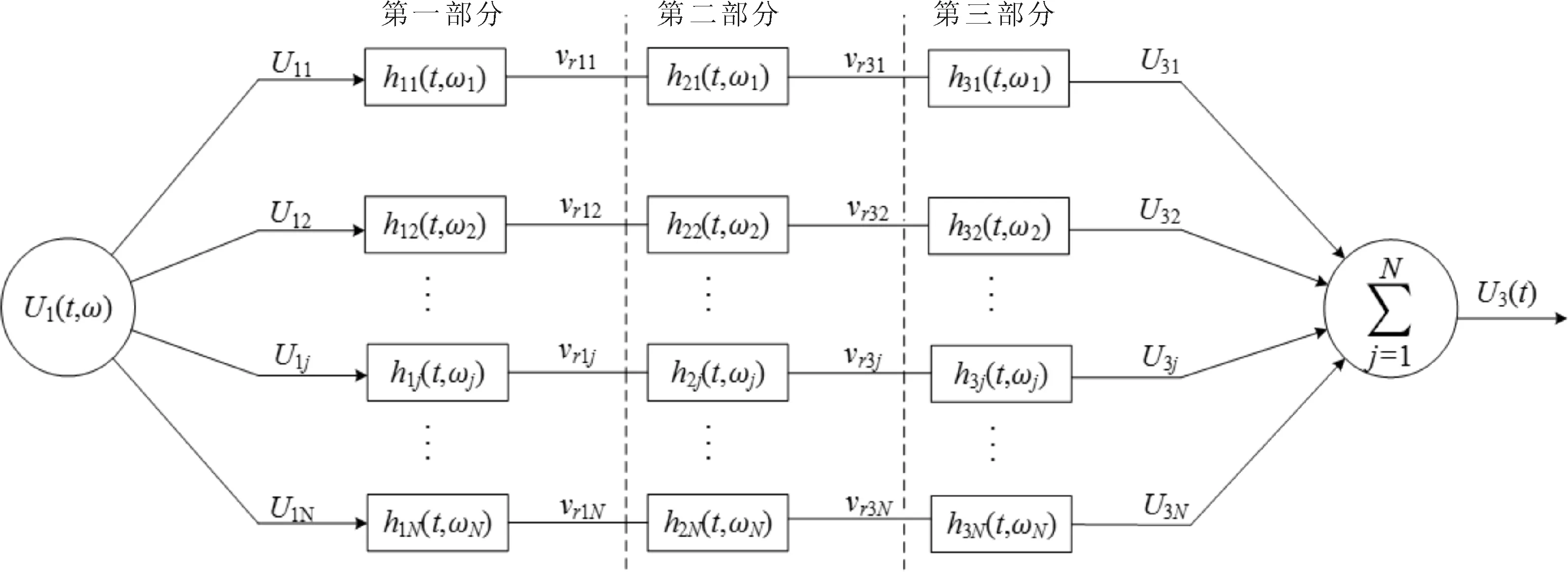
图2 声学测量过程中的传输网络
具有幅度谱为S(ω)和相位谱为φ(ω)的连续驱动电信号U1(t)可以通过N点离散傅立叶变换分解为N个频率分量,即它可以表示N个频率分量的线性叠加,即
(3)
式中|S(ωj)|和φ(ωj)为连续电压驱动信号U1(t)中的第j个正弦频率分量的幅度和相位,且j=1,2,…,N。
为了这样的系统正确地建模,必须考虑具有包括多个频率的输入信号的传输过程。显然,图2所示的并联等效传输网络的结果能表示上述系统,即声学测量过程可以等效为一个并联传输系统。因此,测量声信号(接收器换能器电学端的输出电信号)的归一化形式可表示为
(4)
其中
U3j(t,ωj)=U1j(t,ωj)*
h1j(t,ωj)*h2j(t,ωj)*h3j(t,ωj)。
可以看出,被测物体的物理/几何特性可以依据换能器的电-声/声-电转换和驱动电信号的特性,对测量的声信号进行反演过获得。类似地,也可以从测量的声信号和传播介质的已知物理特性获得换能器的声学特性。
2 系统的物理结构
声学测量系统的物理结构包括三个核心模块,即机械总成模块,电子硬件模块和旨在控制和计算的系统软件模块,其测量系统的结构如图3所示。
2.1 机械总成和电子硬件
机械总成包括舵机、步进电机和滑轨。该部件与微控制器的组合形成声源/接收换能器的定位平台。定位平台的作用是将声源/接收换能器移动/旋转到充满水的消声池中所设定的位置/方向,以进行精确的声学测量。消声池用于测量声学换能器的物理特性,例如换能器的电-声/声-电瞬态响应特性、指向性、辐射功率、发射/接收灵敏度等。
电子硬件由一对声波换能器、一个微控制器、一个电信号波形发生器、一个功率放大器、一个数据采集器和一台用于中央系统控制的台式/笔记本电脑构成。其中,一对声波换能器其中一个作为声源,另一个作为接收器。
2.2 系统软件
系统软件在LabVIEW平台上用图形编程语言g-code开发而成。计算机和硬件之间的通信通过USB串口实现。通过图形界面控制面板,可以选择不同的电驱动信号,设置功率放大器的放大增益,调整声源/接收换能器的在消声池中的空间位置和旋转角度,以进行声信号的精确测量和数据采集。来自LabVIEW的VISA库在图形计算机接口中通过串行端口通信控制4个模块。开发的软件包括四个功能模块如图4所示。
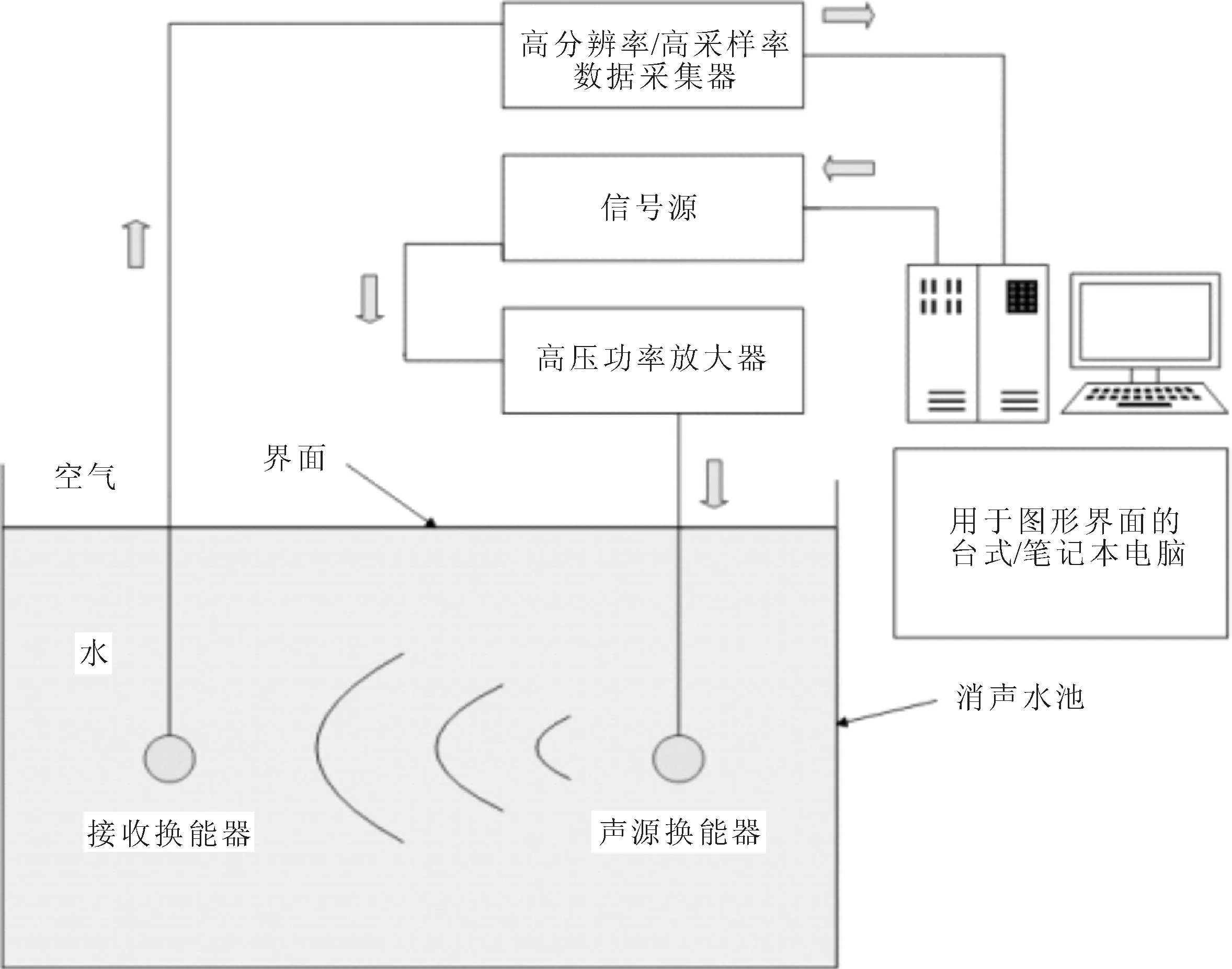
图3 声学测量系统的结构.

图4 系统功能模块结构
在人机界面的功能/选择框中输入参数和命令,以命令模块进行特殊操作和声学测量。这4个模块的功能如下。
(1)电压信号源模块:通过控制软件界面上的控件,用户设置和调制电驱动信号的类型,频率,幅度和周期。电驱动信号的选项是门选正弦波和方波等。
(2)功率放大器模块:通过控制软件界面上的控件和旋钮该设置功率放大器的放大增益,放大由电信号波形发生器产生的电驱动信号。被放大的电驱动信号用于激励源换能器以辐射声信号。对于0.15~1.50 MHz频率范围被放大输出的电驱动信号,最大峰-峰值可以达到220 V。而对于频率范围为10 kHz~150 kHz的输出电压信号,最大峰-峰值可以达到1600 V。对于具有通用阻抗的电信号源,建议选择其输入阻抗为50 Ω。对于具有高阻抗的电信号源,建议选择输入阻抗为50 KΩ。
(3)数据显示/存储模块:通过控制软件界面上的控件,用户可以设置对测量声信号的采集通道,采样率、分辨率和幅度范围。由A/D转换器采集的声信号数据通过USB端口发送到界面面板。这些数据可以在屏幕上实时显示、分析和计算或被存储以便以后的回放和分析。获取的数据的格式可以是文本格式或二进制格式。
(4)移动/转动模块:该模块自动地初始化声源/接收换能器的位置和方向,即将滑动单元移动到零位置,将舵机转向零度的方向。用户可以通过在界面控制面板上输入特定参数来设置滑动单元的步进距离和舵机的旋转角度。设置滑动单元的步进距离范围为0~3 m,舵机的旋转角度范围是0 ~ 360°。
2.3 系统工作流程
通过控制软件界面,可以管理和控制机-电硬件的操作,完成数据采集,并对测量数据进行计算,分析,显示和存储。
第一步是通过控制软件界面对测量系统进行校准。根据测量的具体需要,可以向微控制器发送特定命令,对步进电机的滑动距离和舵机的旋转角度进行设置和调整,使声源/接收换能器移动到所需要的空间位置方向以便进行声学测量。
通过控制软件界面,可以向电信号波形发生器发送命令,使其产生所需有电驱动信号(如门选正弦波和方波等)输至到功率放大器。经过功放后的电驱动信号激励声源换能器向外辐射声信号。然后,辐射的声信号通过特定介质或被测物体传播到接收换能器,并被接收换能器转换为电信号。最终的输出电信号(即测量的声信号)被高分辨率/高采样率的A/D转换器采集,并送到台式/笔记本电脑进行显示、计算、分析和存储等。
3 应用模型
换能器是声学仪器的核心部件,其质量对于测量精度至关重要。作为实际应用的第一个例子,使用这种新开发的声学测量系统测试了薄球壳压电换能器的瞬态响应理论模型。从薄球壳换能器辐射的声信号是一个球面波。作为一个相当好的近似,假设水是弹性传播媒介质。在水中传播的声信号只具有几何衰减,而不存在粘性衰减。在上述假设的条件下,可以认为声信号中的所有频率分量都是以相同的速度在水中传播。在声信号传播过程中,其波形和频谱的形状保持不变,但其幅度随着传播距离的增加而减小。因此,可以认为水对声信号中的所有频率的声学冲激响应是相同的,即
h2(t)=h21(t,ω1)=…=h2j(t,ωj)=
…=h2N(t,ωj)=δ(t-t1)/(1+r),
(5)
式中t1是从声波信号从声源换能器传播到接收换能器所需的时间。
在这个应用实例中,选择门选正弦波电驱动信号来激励声源换能器,其时域和频域的表达式为
U1(t)=[H(t)-H(t-t0)]U0sin(ωst),
(6)

(7)
式中,参数U0、ωs和t0分别表示门选正弦驱动电信号的幅度,角频率和时间窗,H(·)是Heaviside单位阶跃函数。
在理论计算和实际的声学测量中,采用相同的换能器的物理/几何参数和极化模式以及电驱动信号的参数。薄球壳压电换能器由压电材料PZT4构成,且径向极化。球壳的半径rb=7.5 mm,厚度lt=1.5 mm。其中PZT4的密度、介电常数、柔顺常数和压电常数分别为

使用水作为换能器周围的介质,并设定声源换能器和接收换能器之间的距离为1.0米。水的密度为ρm=1.000 g/cm3,纵波在水中的传播速度为vm=1 428.6m/s。使用频率为fs=115 kHz的两周期门选正弦波电驱动信号来激励源换能器,测量接收换能器电学端的输出信号时域波形和幅度谱及理论计算结果如图5所示,图中实线表示理论计算结果,虚线表示实验测量结果。可见,理论计算的接收换能器电学端声波信号的中心频率为116.47 kHz, 而实际测量声波信号的中心频率为115.76 kHz,说明实验测量结果与理论计算符合较好。
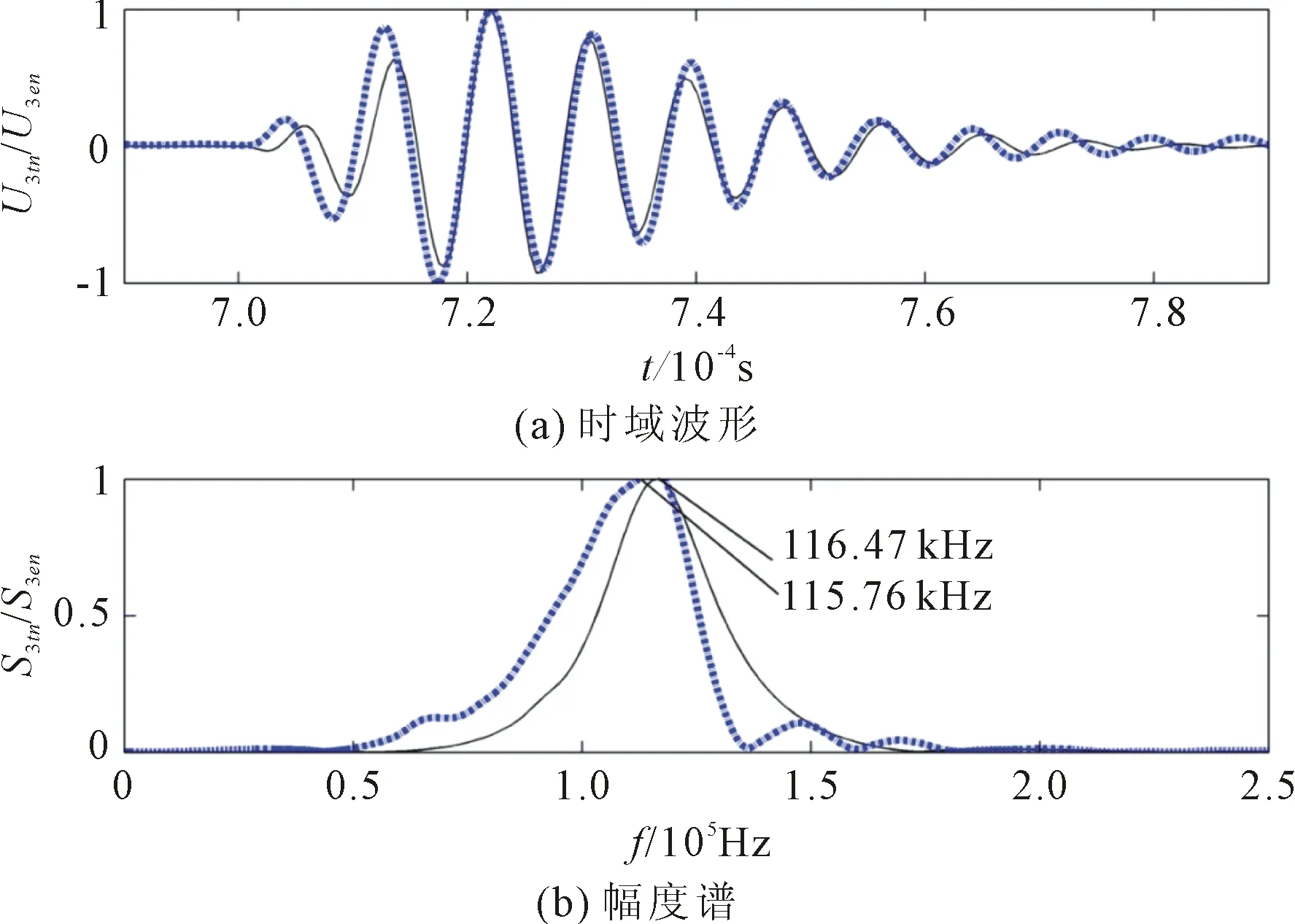
图5 接收换能器电端输出的归一化的电信号
4 结论
基于声学测量并联传输网络模型,设计并开发了一种新的声学测量系统。系统考虑了系统硬件和环境等因素对测量的影响,包括传媒介质,换能器的电-声/声-电转换,以及驱动电信号特性等因素对测量声信号(接收换能器电学端输出)的影响。实例测试结果表明,声学测量系统的测试结果和理论计算结果一致。该声学测量系统采用严格的声学测量物理模型,以及高分辨率和高采样率的A/D转换器,因此,能够对宽频率范围的弱声信号进行精确测量,具有优良性能特征。
理论和实验结果表明声源换能器辐射的声信号受多种因素影响,包括换能器的物理几何参数,其周围耦合介质的物理参数以及电驱动信号的特性。本文所设计和开发的声学测量系统,可以通过对每种影响因素进行适当的调节和校正方式,可进行的精确声学测量,因此,该声学测量系统是一种多种用途声学测量系统。利用该声学测量系统的实测数据,研究物体和换能器特性,如指向性、辐射功率和接收灵敏度等,从而确定被测物体的声学参数,也能够对声学的理论研究进行实验验证。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
声学与电子工程(2021年3期)2021-10-13
电子制作(2019年23期)2019-02-23
电子制作(2018年2期)2018-04-18
汽车文摘(2017年3期)2017-12-08
水下无人系统学报(2017年5期)2017-11-22
噪声与振动控制(2016年5期)2016-11-09
雷达与对抗(2015年3期)2015-12-09
舰船科学技术(2015年8期)2015-02-27
