
基于改进双自适应BP神经网络的故障诊断方法
2019-07-10 05:43张保山
装甲兵工程学院学报 2019年2期
李 波 , 张 琳, 张 搏, 张保山
(1. 空军工程大学研究生院, 陕西 西安 710000; 2. 93748 部队,内蒙古 包头 014000;3. 空军工程大学防空反导学院, 陕西 西安 710000)
BP神经网络是一种误差反向传播的前馈神经网络[1],通常用误差梯度下降法更新网络。由于具备并行分布处理、非线性映射和自学习等优点,BP神经网络广泛应用于智能故障诊断[2]、健康状态预测[3]和自动控制[4]等领域。但是,因其存在易形成局部极小、学习效率低和收敛速度慢等固有缺陷[5],未经改进的BP神经网络直接应用时效果常不够理想。目前,研究者对BP神经网络的改进研究通常集中在附加动量项和学习率自适应等方面,如:谢汝兵等[6]对BP神经网络进行了附加动量项改进并应用于机械故障诊断;王莉莉等[7]对BP神经网络进行“动量-学习率自适应”改进后应用于电容层析成像(Electrical Gapacitance Tomography,ECT)流型辨识;陈华珍等[8]提出了附加动量和学习率的自适应算法,并将这种“双自适应”BP神经网络应用于智能手环体征检测。然而,由于上述方法中动量因子和学习率或固定不变,或仅在有限的固定点上变动,自适应功能较弱,网络收敛性仍显不足。笔者将C语言中的“指针”思想引入BP神经网络中,创建了网络“误差指针”。通过“误差指针”对学习率和动量因子进行双自适应调整,进一步扩展了二者的取值空间,有利于网络更深层次的自适应调整,可提高网络收敛速度和诊断精度。
1 典型BP神经网络及改进
1.1 典型BP神经网络
BP神经网络的结构通常有输入层、隐含层和输出层3部分,根据隐含层数量不同,BP神经网络可分为单隐层和多隐层。研究表明:单隐层即可实现任意非线性映射功能。典型的单隐层BP神经网络结构如图1所示。
BP神经网络基本信号传输和调整原理如下:
输入信号
(1)
输出信号
(2)
式中:σ(·)为激活函数。
样本误差
e(n)=L(a[l](n),y),
(3)
式中:y为期望的输出;L(·)为损失函数。
输出层梯度
(4)
式中:σ′(·)为激活函数的导数。
隐含层梯度
(5)
第n次迭代的偏置
(6)
式中:η为学习率(也称步长),通常取(0,1)区间内的一个常数。
第n次迭代的权重
(7)
可见,标准BP算法属于简单的最速下降寻优法,其调整方向与梯度方向相反。
1.2 动量-自适应学习率BP神经网络
由于神经网络在修正权值和偏置过程中仅仅考虑了当前时刻的梯度,未考虑前一时刻的变化方向,导致网络在学习过程中容易发生振荡,收敛速度缓慢。因此,有研究者提出通过附加动量项的方式进行改进,改进后偏置和权重修正公式如下:
第n次迭代的偏置为
(8)
式中:μ为动量因子,通常取[0.1,0.8]区间内的一个常数。
第n次迭代的权重为
(9)
为了进一步加速网络收敛,有研究者提出对学习率η进行自适应改进,即η不再取固定值,而根据误差大小进行调整,通常取如下阶梯函数[9]:
(10)
可见,这种学习率自适应调整的基本思路是:误差降低时说明调整方向正确,此时增大学习率加速收敛;误差增大时说明调整方向错误,此时降低学习率避免振荡。使用批量训练方式的动量-学习率自适应BP算法流程如图2所示,其中ep为误差容限。
2 改进的双自适应BP神经网络
前述方法中,虽然通过附加动量项能有效抑制振荡,促进网络收敛,但如何选取动量因子μ一直没有较好的方法。μ选取过小,惯性效果弱,对于网络的振荡抑制不够明显;μ选取过大,惯性效果过于显著,又不易加速收敛。孙瑜[10]通过对比μ取不同值时神经网络收敛效果,得出了μ的最佳值与学习率η有关的结论,并给出了不同η下μ的一些取值范围。但因神经网络初始权值的随机性,其最佳值理论尚不具备一般性。同时,学习率自适应方法仅考虑误差的增大或减小,而未考虑误差连续增大或减小的情况,自适应能力仍显不足。
于海宁等[11]在研究C语言程序设计时提出一种改进的指针分析方法,提高了对敏感量的控制能力。BP神经网络中动量因子和学习率作为对误差函数敏感的变量,同样适用于上述方法。因此,笔者设计了计数器p1(p2)作为网络误差e(n)连续增大(减小)的标志量,并将其作为“误差指针”供动量因子和学习率自适应调节时引用,具体调整策略如下:
误差指针p1和p2分别为
(11)
(12)
自适应学习率η为
(13)
自适应动量因子μ为
(14)
如:误差e(n)连续减小k次时,说明调整方向正确并且搜索步长不足,此时以k幂指数方式提高学习率η,并以k幂指数方式降低动量因子μ,这样就可以进一步加速网络收敛。使用批量训练方式,改进的双自适应BP算法流程如图3所示。
3 仿真实验及结果分析
实验分析程序运行于Windows10系统,处理器为Intel(R)Core(TM)i5-7200u,CPU 2.50 GHz 2.71 GHz,软件版本为MATLAB R2016a。
3.1 样本数据
绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)是一种常用的电力电子元件,广泛应用于整流、逆变、脉宽调制等电路。笔者以某型雷达的三相电压型交-直-交变频器逆变电路为研究对象,对其IGBT开路故障进行诊断,其电路如图4所示。
统计表明:三相电压型交-直-交变频器逆变电路中1个IGBT开路故障居多,2个IGBT同时开路故障较少,3个以上IGBT同时故障的概率极小。因此,笔者以单IGBT开路、双IGBT开路(以T3、T4为例)和无故障等状态为诊断内容,对不同状态进行二进制编码并设定了故障编号;通过Simulink获取了IGBT在不同状态下的电路输出电压值,共取得880组样本[12](其中110组为正常值);随机选取其中的800组用于训练,另外80组用于测试。三相逆变电路IGBT开路故障数据(归一化后)如表1所示。
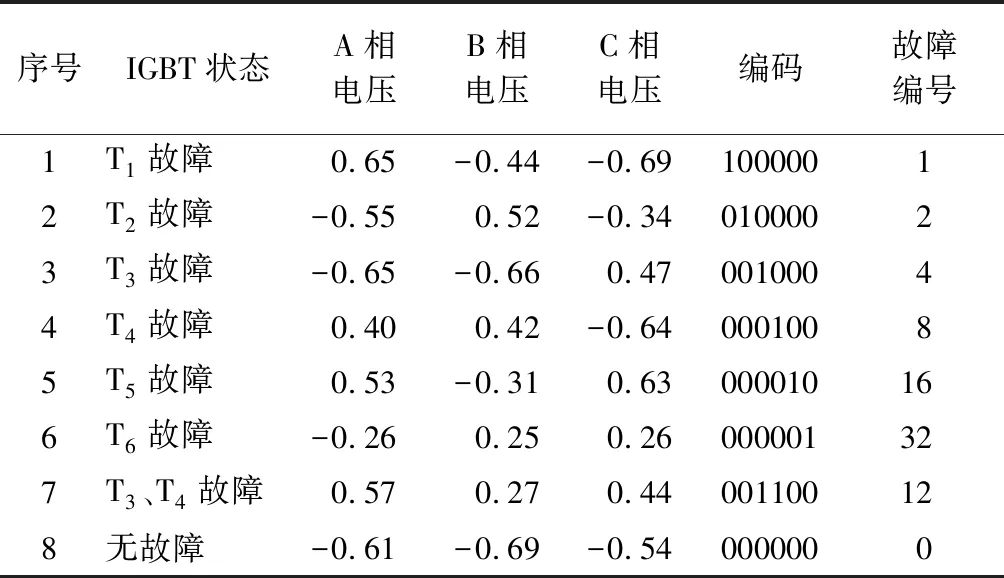
表1 三相逆变电路IGBT开路故障数据(归一化)
3.2 故障诊断方法对比
根据样本特点,设计了3×5×6的BP神经网络,使用批量训练方式。其中隐层传输函数为Log-sigmoid,输出层传输函数为Purelin。最大迭代次数为300步,为了更好地对比各算法收敛性,误差容限设为0。
当使用典型BP神经网络进行故障诊断时,选取的学习率和动量因子不同,网络收敛也不同。经测试,学习率η和动量因子μ分别选取0.8和0.7时,神经网络学习效果最理想,达到稳定误差的迭代次数132步。使用训练好的网络进行测试,诊断正确率为75%,误差曲线及诊断结果见图5、6。
由式(3)、(7),可得典型BP神经网络的误差为
(15)

在使用动量-自适应学习率调整方法时,学习率初始值设置为0.8。经验证,μ=0.6时,神经网络学习效果最理想,达到稳定的迭代次数为38步,测试准确率提高至76.25%,误差曲线及诊断结果如图7、8所示。
由式(3)、(9),可得动量-自适应学习率的网络误差为
(16)
最后,使用基于误差指针改进的学习率和动量因子双自适应性BP算法,学习率初始值同样取0.8,动量因子初始值取0.6。此时,网络达到稳定的迭代次数为46步,准确率为82.5%。误差曲线及诊断结果如图9、10所示。
由式(3)、(13)、(14),可得改进的双自适应神经网络误差为
(17)
此时,误差e(n)受η(n-1)和μ(n-1)双重调节,在指针变量p1(p2)的控制下,误差正常下降时,调节速度不断加快,出现震荡时,调节幅度时将得到抑制。因此,其误差降低速度加快,并且振荡效果得到了较好的抑制。
为了进一步对比各种算法,取网络最后100次迭代误差进行对比,结果如图11所示。不同算法误差均值分别为0.685、0.390、0.308,均方差分别为0.002 40、0.001 30、0.000 12,由此可知:经改进的双自适应BP算法收敛性和诊断精度均优于典型BP算法和动量-自适应学习率BP算法。
4 结论
笔者通过建立误差指针,设计了基于改进双自适应的BP算法,并建立了相应故障诊断模型。仿真实验证明该方法既增强了网络的收敛性,又提高了故障诊断精度,可以改善现有方法收敛速度慢、不稳定、诊断精度偏低等缺陷。但本文并未对动量因子、学习率初始值和调整门限的选取进行研究,而初始值和调整门限的取值在一定程度上影响BP神经网络的性能,因此,需对相关内容做进一步研究。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
软件学报(2020年6期)2020-09-23
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20
青年歌声(2019年2期)2019-02-21
广东第二课堂·小学(2017年9期)2017-09-28
科学生活(2016年10期)2016-11-02
四川党的建设(2014年10期)2014-08-23
软件工程(2014年3期)2014-03-15
