安全可靠多站接力测控自动化控制技术
2019-07-10 07:14陈军超张虹董义兵由凯
指挥与控制学报 2019年2期
陈军超 张虹 董义兵 由凯
1.西安卫星测控中心陕西西安710043
目前,西安卫星测控中心的测站大部分设备基本实现了测控设备自动化运行[1],成功率可达到99%.但目前的设备自动化运行只局限于卫星长期管理阶段单站测控,无法完成早期轨道段测控任务的自动化控制,这种状况是对中心自动化建设和测控设备自动化长远发展的极大制约.造成这种缺陷的一个重要因素就是难以解决在早期阶段的多站接力测控、捕获跟踪异常等问题.这是因为目前测站设备的自动化控制单纯以网管计划为统一依据,不能灵活应对各种联合测控情况.
实现多站接力测控的一个很好解决方案就是为设备的自动化运行增加控制策略,使得测站设备的自动化运行同时以网管计划和控制策略为依据,增加设备自动化运行的灵活度,从而实现多站接力测控自动化运行控制.
1 多站接力测控手动运行场景
目前,测站多站接力测控大多采用手动方式运行.在前站可直接发送上行的情况下,测站也可采用自动化运行+手动运行的方式.设备操作人员根据中心调度对目标进行跟踪,根据实际情况分析,主要存在以下运行场景: 同点频接力跟踪(标准)及同点频同码组接力跟踪(扩频)、同点频不同码组接力跟踪和遥控优先级竞争式跟踪.在手动运行模式下,以同点频接力跟踪为例,场景可描述如下:
1)测站根据设备工作计划按时加载缺省状态设置宏: 前站、后站设备跟踪状态都设置为TM 状态;
2)前站跟踪后,根据中心调度,将跟踪状态设置为TM+TC+R 状态;
3) 前站状态设置完成后向中心进行状态报告,中心根据前站遥控可发令状态,开始发送指令;
4)后站按照缺省状态进行跟踪;
5) 中心向测站发出前站退出接力调度口令,前站根据调度将状态设置为TM+R 状态,设置完成后向中心进行报告; 中心向测站发出后站接力调度口令,后站根据调度将状态设置为TM+TC+R 状态;
6) 后站状态设置完成后向中心进行状态报告,中心根据后站遥控可发令状态,开始发送指令;
7) 中心向测站发出接力跟踪结束调度口令,测站根据调度退出接力跟踪测控任务.
2 多站接力测控自动化运行设计
本文设计一种安全可靠的多站接力测控自动化运行架构,该架构以中心调度为主,根据XML 策略库、指令库和设备实时状态判读结果[2],向相关设备发送接力跟踪命令[3].该架构实时获取设备运行状态作为设备控制命令的结果反馈,并根据测站设备反馈状态指导中心调度命令执行,能有效降低多站接力测控过程中人为因素的影响,提高测控设备自动化运行的安全性和可靠性,提升接力测控自动化运行水平和任务成功率.
多站接力测控自动化运行架构设计如图1所示.
以该架构为模型,搭建多站接力测控自动化运行操作平台.该平台有两个外部数据接口: 设备运行状态和中心调度命令.其中设备运行状态是指影响测控任务和遥控发令的设备关键点状态,平台根据设备状态判读算法,从策略库中获取设备综合状态判断策略,给出设备综合状态判断结果和遥控可发令判断,中心根据遥控可发令判断向卫星发送遥控指令[4];中心调度命令是中心通过远程控制向测站设备发送设备控制命令,主要包括:
1)多站接力跟踪开始命令;
2)设备前站、后站设置命令;
3)设备前站、后站切换命令;
4)设备参数和状态设置命令;
5)多站接力跟踪结束命令.
平台根据多站接力测控算法,将中心调度命令转换成设备可识别的设备控制命令,远程控制测站设备进行相应操作.
2.1 控制策略设计
由于多站接力跟踪涉及多个站多套设备的联合工作,各个站运行模式的差异、各套设备工作方式的不同,导致了在多站接力跟踪任务中自动化运行参数也存在很大差异.同时,在不同接力跟踪场景下,多站接力跟踪的流程亦存在不同.因此,在多站接力测控自动化运行设计中,采用策略配置的方式,可屏蔽各设备参数和运行流程带来的差异,方便操作人员对运行策略进行定制[5].多站接力跟踪自动控制策略主要包含以下3 个策略项:
1) 设备综合状态判断策略.该策略是判断设备综合状态是否正确的参考依据,它描述了参加测控任务的设备在指定跟踪模式下、指定任务下对设备状态起关键性作用的参数集合的合法性.通过参照参数集中参数的合法值或值域,可判断出设备的综合状态是否正确.该策略采用四级结构对设备运行的关键参数集合进行描述,设备综合状态判断策略结构描述如图2所示.
考虑到多套设备在多个工作模式下多个任务的参数集要求可能相同,结构中采用组的形式对策略配置与特征模式匹配[6].该策略的主要描述内容如表1所示:

表1 设备综合状态判断策略参数描述表
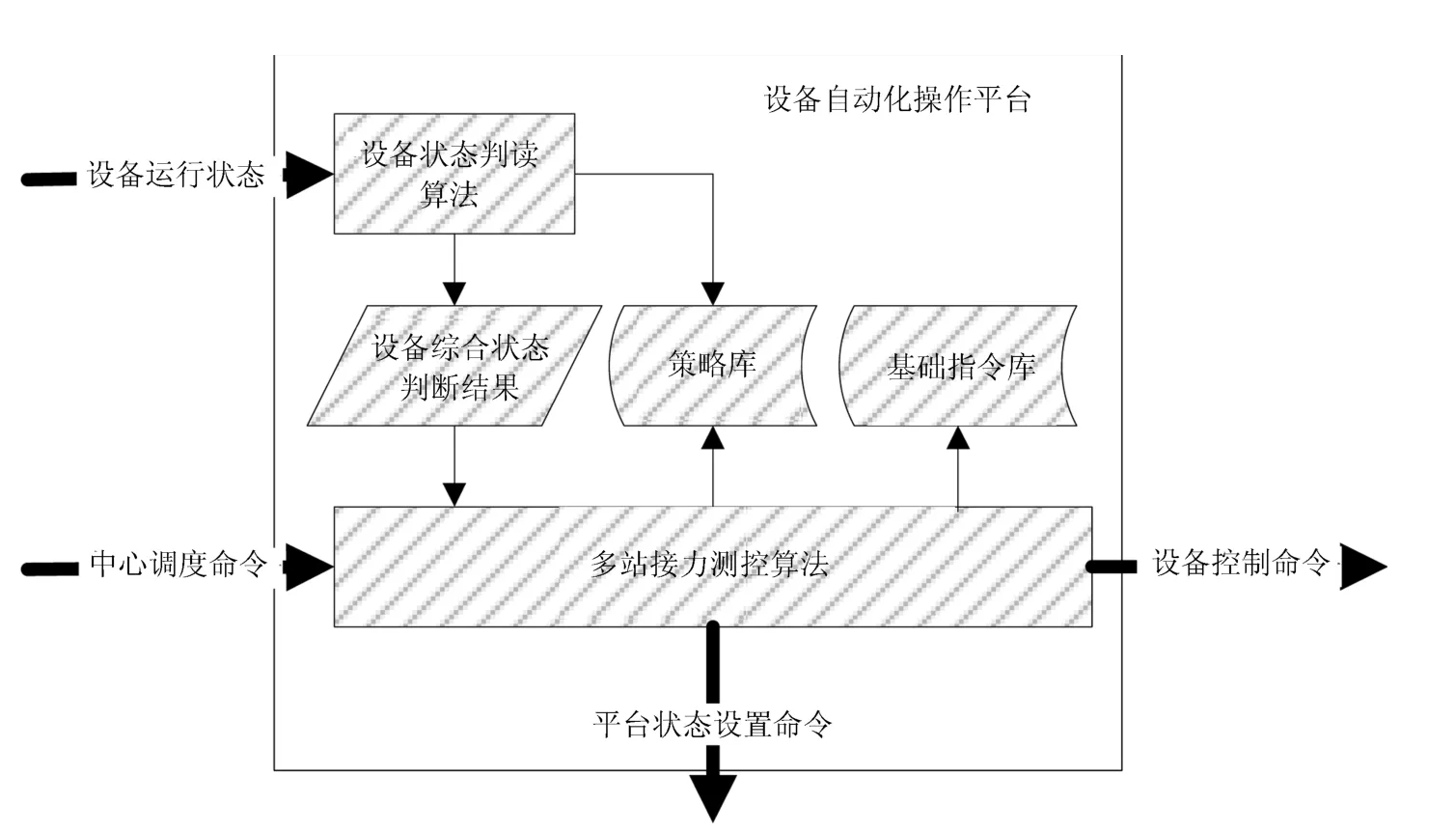
图1 多站接力测控自动化运行架构设计
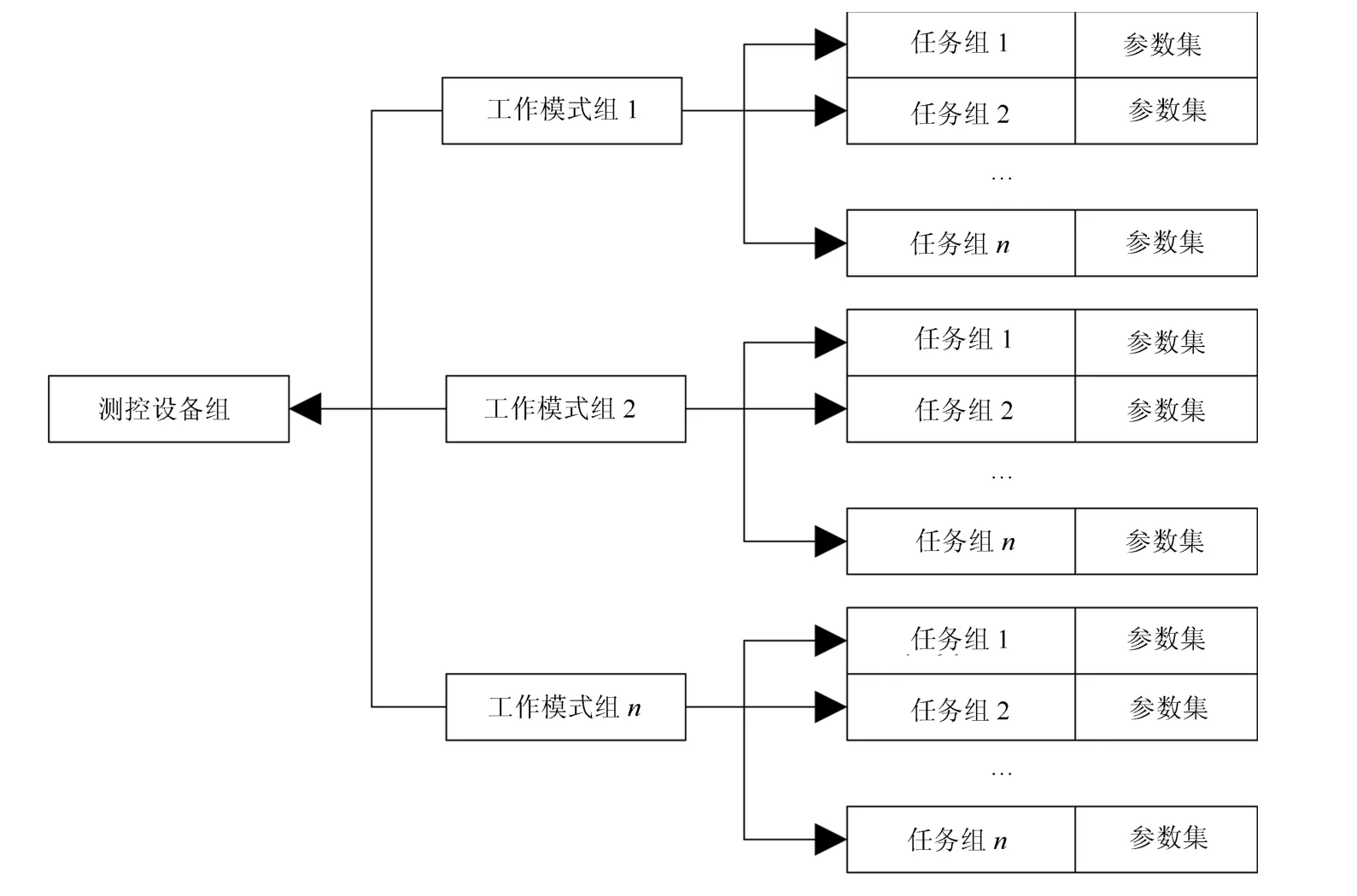
图2 设备综合状态判断策略描述结构图
2) 命令转换策略.该策略将中心调度命令分解成一系列具有逻辑关系的简单操作指令,并结合基础指令库,将分解的指令转换成各设备可识别的设备操作命令或平台内部状态设置命令[7],从而完成较为复杂的设备远程操作控制.命令转换策略逻辑转换描述如图3所示:
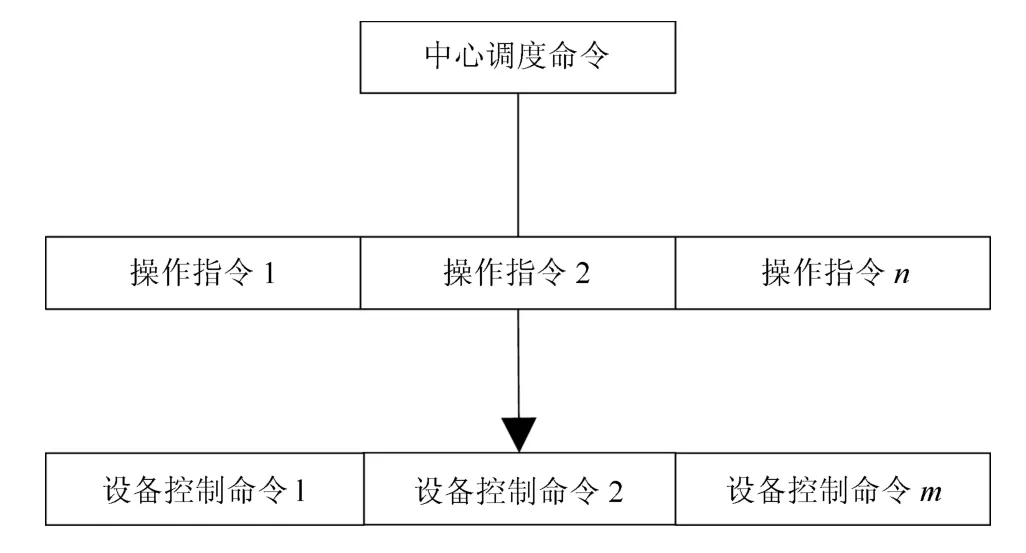
图3 命令转换策略逻辑转换描述图
3) 系统运行策略.系统运行策略描述了多站接力跟踪自动化运行方案,考虑了平台操控的安全性和可靠性,是平台运行和算法设计流程的依据.平台运行策略如图4所示.
平台以主备(热备) 方式运行,主机采用大环比对方式确保数据的正确性,即控制命令发送设备后,接收设备的应答响应,并实时监测设备运行状态;备机采用小环比对方式[8],即控制命令在内部进行正确性比对,并实时监测设备运行状态和主机运行状态.如果主机出现故障,平台会自动切换到备机进行工作[9],也可人工进行主备机的切换.
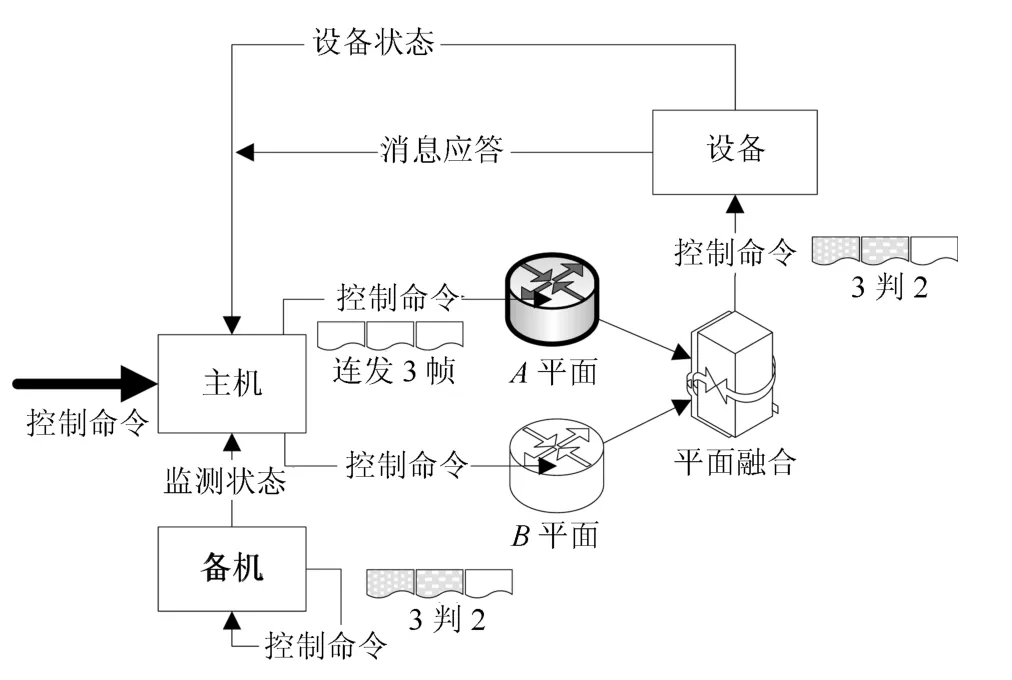
图4 平台运行策略描述图
平台在网络通信上采用A、B双平面方式与设备进行通信[10],在设备接收端再对双平面进行融合[11].这种方式可以保证通信链路有备份,即使一个链路出现故障,另一个也能保证通信正常工作,提高通信安全性可靠性.每个平面使用UDP 加密包进行通信[12],在数据传输上借鉴冗余备份机制[13−14],采用3判2 比对方式(每次通信发3 个数据包,接收端判断有两个相同,则证明数据正确) 进行处理,确保数据的正确性和可靠性.
2.2 设备综合状态判读算法
平台采用设备综合状态判读算法给出设备综合状态判读结果.算法给出的设备综合状态判读结果的合法性可以采用简单二叉树向量机模型表示[15],如图5所示.
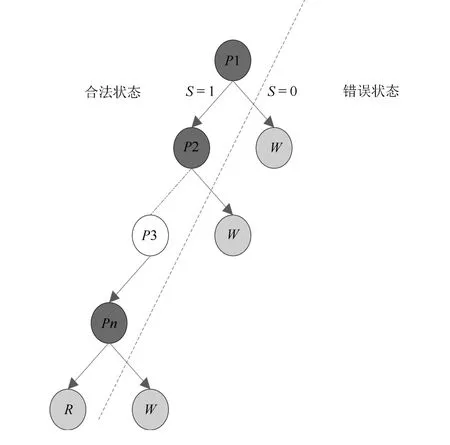
图5 设备综合状态描述二叉树
算法中用ωi表示参数的影响系数,ωi=1 的参数称为设备综合状态的影响因子,ωi=0 的参数称为非影响因子.用Pi表示第i个参数,则上图中P3为非影响因子.对于设备综合状态的判别,只考虑影响因子的状态,不考虑非影响因子的状态[16].用Si表示参数Pi的状态,Si=0 表示该参数状态错误,Si=1 表示该参数状态正常.用R表示设备综合状态正常,W表示设备综合状态异常.
从图4中可以看出,如果节点Pi的状态Si=0则设备综合状态直接被判定为错误状态,只有当节点Pi的状态Si=1 时,算法才会继续对节点Pi+1进行状态判断,如果所有节点状态的判读结果都正常,则算法结果为R状态,即设备综合状态正常.用S表示设备综合状态,则

由于

由式(1)和式(2)可以得出:
其中,F(ωi,Pi)是对Si进行求值的函数,其处理过程遵循以下策略:
1)ωi值为0 时,函数返回值等于1;
2)ωi值为1 时,函数返回值取决于对Pi的状态计算值;
3)对Pi的状态求值要遵循设备综合状态判断策略.
设备综合状态判读算法流程如图6所示.
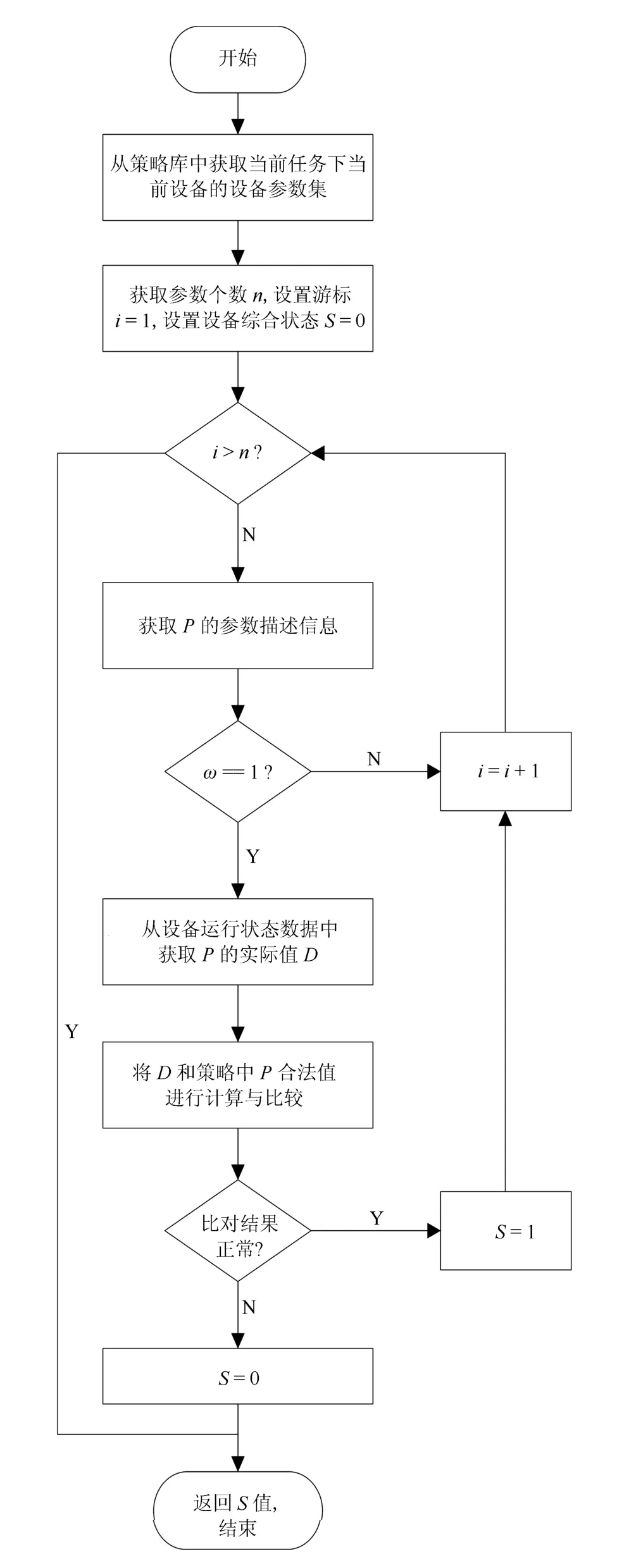
图6 设备综合状态判读算法流程图
2.3 多站接力测控算法
多站接力测控算法完成对多站接力测控自动化运行的控制,测控算法流程图如图7所示:
该算法主要实现以下几个方面的功能:
1)按照策略和测控设备工作计划对多站接力测控自动化运行过程进行严格控制和跟踪阶段划分;
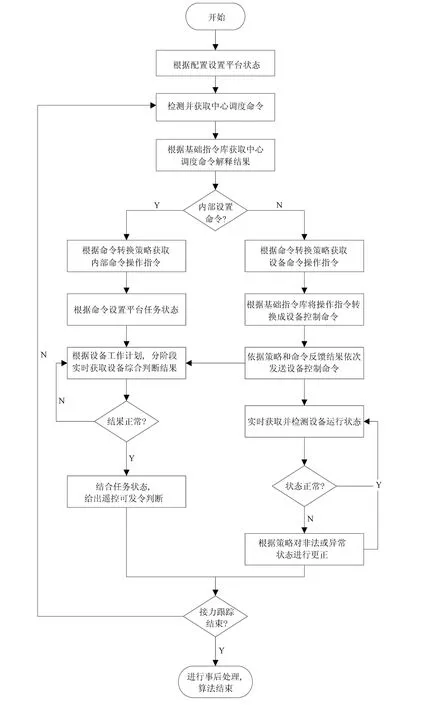
图7 多站接力测控算法流程图
2)将中心调度命令转换成设备控制命令或平台内部状态设置命令,并按照相关策略将命令发送出去,或根据状态设置命令设置平台状态;
3) 实时获取设备综合状态结果,并结合设备工作计划和任务状态给出遥控可发令判断;
4) 实时获取设备相关运行状态,对非法或异常的设备状态进行状态抑制或状态纠正.
3 多站接力测控自动运行场景
经过自动化运行设计后的多站接力测控场景描述如下:
1)测站根据设备工作计划进入自动化运行状态;
2)自动化运行操作平台根据中心命令设置跟踪前站和跟踪后站;
3)自动化运行操作平台根据运行策略实时监听并设置前站、后站跟踪状态;
4)自动化运行操作平台根据前站设备综合状态判读结果和中心调度命令给出可发令判断,开始发送指令;
5)自动化运行操作平台根据中心命令和运行策略切换前站、后站并设置状态;
6)自动化运行操作平台根据后站设备综合状态判读结果和中心调度命令给出可发令判断,开始发送指令;
7)自动化运行操作平台根据中心调度命令发出接力跟踪结束口令,测站设备根据命令自动退出接力跟踪测控任务.
从以上运行场景可以看出,经过自动化运行改造后的多站接力测控相比传统的手动多站接力测控,在流程上无需人为干预,只需中心通过命令方式便可完成多站接力测控任务,能够较好地实现多站接力测控的自动化运行.
4 结论
多站接力测控任务是卫星早期阶段和长期管理阶段一项非常重要的测控工作,然而当前手动模式下的多站接力测控方案严重影响着设备自动化运行,实现多站接力测控的自动化运行是促进“测控设备自动化”这个长远目标中不可或缺的环节.本文根据目前多站接力测控不能进行自动化运行的实际情况,研究探索一种基于XML 可配置策略的自动化控制技术,并根据该技术搭建测控设备自动化操作平台,解决多站接力测控自动化运行问题.
本文研究成果主要有以下特点:
1)设计了多站接力测控自动化控制技术和方案,解决了多站接力测控自动化运行问题;
2) 采用可配置的策略定制方法,使得用户可根据实际情况对自动化控制策略进行修改,提高了自动化运行的灵活性和适应性.
3) 解决了传统多站接力跟踪对人的依赖性,有效降低了人为因素对测控任务的影响,提高了任务运行可靠程度.
猜你喜欢
振动与冲击(2022年19期)2022-10-17
测绘地理信息(2022年2期)2022-04-02
航天标准化(2021年3期)2021-12-25
电脑爱好者(2021年18期)2021-09-23
中国船检(2020年11期)2020-11-27
导航定位与授时(2020年4期)2020-07-29
人大建设(2020年2期)2020-07-27
全球定位系统(2020年1期)2020-03-31
电脑爱好者(2016年22期)2016-12-16
太空探索(2016年12期)2016-07-18