异源多分辨率卫星影像匹配算法研究
2019-07-05 06:28:24霍门婕范大昭
测绘通报 2019年6期
霍门婕,范大昭,董 杨
(信息工程大学地理空间信息学院,河南 郑州 450001)
在遥感和对地观测领域,随着对地观测技术的发展,人类对地球的综合观测能力达到空前水平[1]。多平台、多传感器、多时相的海量遥感卫星影像,为我国及世界提供了日益丰富的数据资源。然而,海量规模的大数据已远超出传统信息处理系统的处理能力,并且各型号遥感卫星未能兼顾其他卫星型号的技术要求。因此,有必要发展可行、高效的针对遥感卫星影像的大数据处理技术[2]。现阶段,针对多型号遥感卫星探测获取的海量大差异遥感数据缺乏高效联合处理手段,难以真正实现基于多星影像数据的异源匹配。如何充分利用多星影像自身特点,结合可编程图形硬件,设计高效影像匹配算法,实现多星影像数据高精度联合定位是当前面临的重大挑战。开展异源遥感卫星影像匹配技术研究具有较为重要的现实意义和应用价值。
基于此,本文设计了一套面向异源多分辨率卫星影像的匹配流程,并在异源多分辨率遥感卫星影像数据集的支持下,进行多组特征提取与匹配算法的对比试验,得到较好的匹配方案[3]。
1 异源多分辨率卫星影像匹配流程
1.1 特征提取与匹配算法
卫星影像上存在的灰度不连续的点,或局部影像上灰度出现突然变化的点,称为特征点。将这些有较大信息量的特征点从影像中提取出来称为特征提取。现阶段常用的几种特征提取算法有:SIFT(scale invariant feature transform)[4]、SURF(speeded up robust features)[5]、KAZE[6]、AKAZE(accelerated KAZE)[7]、ORB(oriented fast and rotated BRIEF)[8]、BRISK(binary robust invariant scalable key-points)[9]等特征提取与描述算子。
得到影像特征后,即可进行特征匹配。特征匹配算法一般分为两个步骤:一是相似性测度确定;二是搜索策略确定。相似性测度是度量特征描述符间相似性程度的定量指标,常用的相似性测度有欧氏距离、汉明距离、曼哈顿距离等。针对空间尺度描述符的复杂性,现多采用暴力搜索算法(brute force,BF)[10]、近似最近邻算法(approximate nearest neighbor,ANN)[11]等策略进行影像特征的匹配搜索。
卫星影像匹配特征通常存在一定数量的噪声,因此特征点对的匹配提纯至关重要,本文主要介绍RANSAC匹配提纯算法[3]。RANSAC算法可以从一组数据集中通过迭代的方式获取最合适的数学模型参数,其基本假设是:数据集的分布可以用一些模型参数来解释,满足该模型的点称为内点,因噪声极值等原因不能适应该模型的外点将被剔除。RANSAC改进算法主要针对两个方面进行优化:一是提纯速度优化,如R-RANSAC(randomized RANSAC)[11-12]等;二是匹配提纯率优化[13],如M-RANSAC(multi RANSAC)[14]等。
1.2 ROC曲线
为进行客观有效的算法对比,本文设计了一种基于RANSAC阈值变化的ROC曲线评判方法,对每种算法的适用情况进行评估。ROC曲线是以FPR(false positive rate)为横坐标,TPR(true positive rate)为纵坐标所绘制的曲线。ROC曲线越靠近左上角越准确,最靠近左上角的点就是正确率最高的阈值选择。ROC曲线参数见表1。
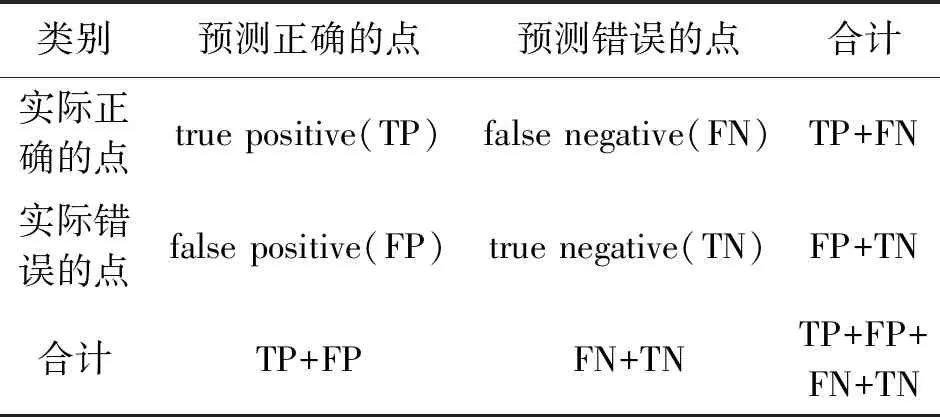
表1 ROC曲线参数
TPR、FPR计算公式分别为
(1)
(2)
传统的ROC曲线取值是以每点的概率值为基础,变换不同的阈值得到多组ROC曲线点对。针对卫星影像匹配结果,设计利用不同的RANSAC阈值,从而得到不同的ROC曲线点,用于表征匹配算法的性能。
1.3 异源多分辨率卫星影像匹配流程
基于以上的特征提取、匹配与提纯算法,本文设计了一套卫星影像的匹配流程,实现了较为丰富的特征点对稳健提取。具体流程如下:①利用多种特征提取算子分别对卫星影像进行特征提取,并整合多种算子的特征提取结果,为随后的影像匹配提供丰富的特征点;②利用卫星影像的辅助参数进行匹配约束;③进行卫星影像的匹配提纯优化,提取出正确、丰富的匹配点对,得到较好的卫星影像匹配结果。具体匹配流程如图1所示。
2 异源多分辨率卫星影像匹配算法分析
2.1 特征点提取与匹配试验
本次试验的数据集为异源4颗卫星的全色影像和多光谱影像两组数据,具体的试验数据信息介绍见表2和表3。

表2 试验所用数据集

表3 试验方法
本试验在全色数据集中选取高分一号卫星和资源三号02星的两张同一地区、不同分辨率的典型异源影像进行上述多种算法的匹配试验,记录不同算法的试验耗时,并根据试验的结果统计匹配的正确率,具体试验数据见表4。
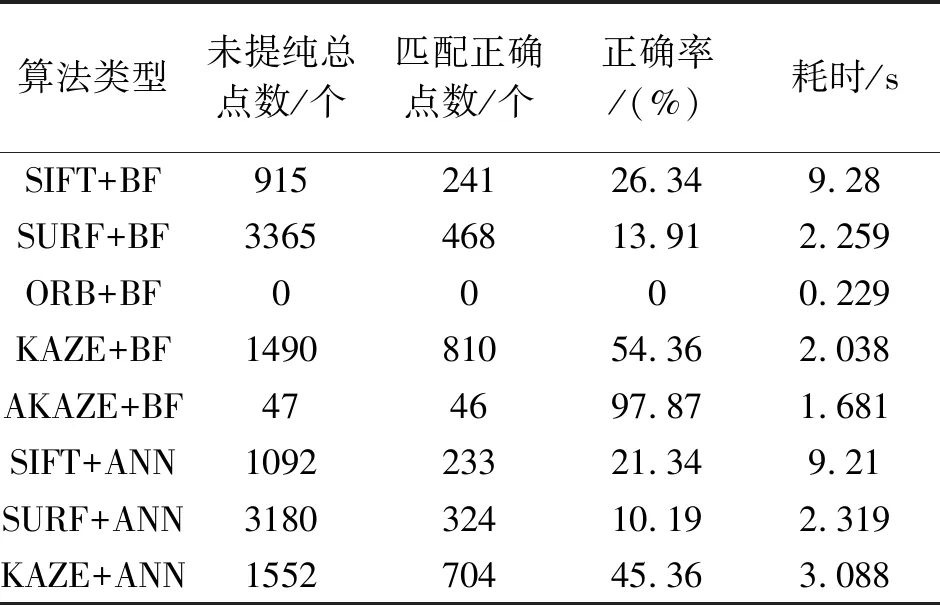
表4 试验结果信息统计
在本次试验范围内,以上算法在得到匹配点数量方面依次是:SURF+ANN、SURF+BF、KAZE+ANN、KAZE+BF,匹配结果正确率方面依次是:AKAZE+BF、KAZE+BF、KAZE+ANN、SIFT+BF;计算速度方面依次是:ORB+BF、AKAZE+BF、KAZE+BF、SURF+BF。
2.2 特征点对匹配提纯试验
本次试验使用的是高分一号卫星和资源三号02星的两张同一地区、不同分辨率的典型异源影像。KAZE+BF算法经过匹配提纯后的效果如图2所示。
不同的RANSAC阈值对后期匹配的正确率有较大的影响,对不同的8种组合算法分别试用不同的阈值,试验检测出每种组合算法对于不同阈值的适用情况,得到适用于异源多分辨率卫星影像匹配的优化组合算法和阈值。部分试验结果如图3所示。
由上述试验结果可知,RANSAC阈值越小匹配的正确率越高,但是由于RANSAC滤除了较多的匹配点,因此匹配得到的总点数不够丰富,需要综合考虑后决定RANSAC的阈值选择。
基于RANSAC阈值的ROC曲线越接近于左上角,说明直接匹配得到的特征点对具有较好的稳健性,能够适用于不同阈值下的RANSAC提纯,表征出特征提取与匹配算法的优良特性。
本次试验分别设置RANSAC阈值为:1.0、2.0、3.0、4.0,记录并计算每种组合算法在对应阈值下的TPR、FPR值,由本试验数据得到的ROC曲线如图4所示。
ROC曲线直观地反映了每种算法的阈值适用情况,从上至下分别为AKAZE+BF、KAZE+ANN、KAZE+BF、SIFT+BF这4种组合算法。将ROC曲线的效果按照从优到劣的顺序分别从8到1进行打分,并综合每种组合算法的匹配点数量、计算耗时、匹配的正确率这3种检测指标的统计结果,可以得到本次试验的综合性能评估情况,见表5。
在本次试验范围内,综合评估后得出匹配结果较好的算法有:AKAZE+BF、KAZE+BF、KAZE+ANN。

表5 8种算法综合评判
2.3 异源多分辨率卫星影像匹配试验与分析
本文在传统特征提取与匹配算法的基础上,综合了SIFT、SURF、ORB这3种特征提取算子,将这3种算法分别提取的特征点整合后进行匹配并提纯,得到了相较原来更为丰富的匹配点对。本试验在多光谱数据集中选取高分一号卫星和资源三号02星的两张同一地区、不同分辨率的典型异源影像进行上述的匹配试验,具体试验结果如图5所示。
本次试验将SIFT、SURF、ORB 3种算子的特征提取结果整合后,利用BF算法进行匹配搜索计算。由两张异源遥感卫星影像的特征点整合前后匹配效果对比可知,整合后得到的匹配点数量比仅利用一种特征提取算子得到的匹配点数量更多,效果更好。
如图6所示,由4张异源遥感卫星影像的特征点整合前后匹配效果对比可知,整合后得到的多张异源影像匹配点数量也较仅使用一种特征提取算子得到的匹配点数量更多,试验结果得到了有效的改进。
3 结 语
本文主要针对异源多分辨率卫星影像的匹配技术进行研究,着力于实现多平台、多传感器、多时相、多角度卫星影像的联合匹配处理,以提高海量影像数据的利用率[15]。通过实现多种特征检测与匹配算法的交叉组合,对比选择得出适用于异源影像匹配的解决方案,针对多张异源多分辨率卫星影像匹配点对较为稀疏的问题,设计了一套卫星影像匹配流程,得到了较为丰富的匹配结果。对匹配提纯后的多组异源匹配方案结果进行综合分析,设计了一种基于RANSAC阈值的ROC曲线匹配性能评判方式,利用多种检测指标,对匹配结果进行综合评估。本文对于异源多分辨率卫星影像匹配技术进行了一定的基础性研究,但是研究内容依然有待深化,应进一步提高匹配算法的适用性,使影像匹配点的分布更加均匀,优化匹配计算速度,更高效地完成异源多分辨率卫星影像的匹配。
猜你喜欢
海洋通报(2022年4期)2022-10-10 07:40:26
农业工程学报(2022年5期)2022-06-22 12:15:58
中华戏曲(2020年2期)2020-02-12 05:17:58
数学物理学报(2019年3期)2019-07-23 01:15:40
电子制作(2018年19期)2018-11-14 02:37:08
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
自动化学报(2017年11期)2017-04-04 02:52:58
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
华东理工大学学报(自然科学版)(2015年3期)2015-11-07 09:17:36