
风-车-桥耦合作用下大跨桥梁驾驶模拟实验方法
2019-07-04 06:46潘晓东梁洁馀周玉芬
同济大学学报(自然科学版) 2019年6期
潘晓东, 梁洁馀, 陈 丰, 周玉芬
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804;2.科罗拉多州立大学 道路与环境工程系,美国 科罗拉多 柯林斯堡 80523)
大跨桥梁是交通运输系统中的关键节点,通常承载着繁重的交通量,对整个交通系统的效率和安全影响很大.同时,大跨度桥梁周边环境空旷,通常位于大风高发区,对驾驶安全构成了特殊的挑战.具体而言,由于大跨度桥梁的桥面高度一般高达50 m以上,因此风对桥梁的影响相当强烈.大跨桥梁上不仅受到侧风的单一影响,还存在风、车、桥之间复杂的动态相互作用.大跨桥梁上的行车安全问题是涉及人-车-路-环境的复杂问题,但已有的基于驾驶模拟实验的研究缺少对侧风和桥梁振动的综合考虑.因此,本文基于数值模拟的风-车-桥耦合理论,同时融合侧风与桥梁振动作用,建立更为逼真的面向强风作用下桥梁驾驶环境的驾驶模拟场景,并通过驾驶模拟实验探究了侧风及桥梁振动作用对驾驶安全性的影响.
过去几十年中,研究人员对侧风作用下的驾驶安全问题进行了大量的研究.数值模拟方法已被很多学者广泛使用,是研究侧风下车辆动力学的主要方法之一.Baker进行了一系列关于强烈侧风作用下车辆安全性的研究,建立了一个定性的框架用来评估车辆的事故风险[1-4].但是,这些研究只局限于一般道路,并不完全适用于桥梁.Guo和Xu[5]进行了车-桥耦合作用下的车辆在大跨度斜拉桥上遭受波动风的安全性分析.韩万水和陈艾荣[6-7]建立了较为完善的风-车-桥系统空间耦合分析模型,编制了相应模块并嵌入自行研发的桥梁结构动力分析软件BDANS,进行了详细的参数分析.在Chen等[8]的研究中,建立了一个包含车-桥相互作用的局部车辆事故评估模型,以考虑桥梁结构在多风环境下的振动影响.Chen等[9]进一步开发了一种先进的单车事故评估模型,分析车辆与危险驾驶条件的耦合效应,包括阵风.在以上的文献中,驾驶安全都是通过假定只有一辆车以恒定速度在桥上行驶来评估的,而现实中桥梁上的交通流量和车辆速度都会发生变化,因此这样的假设是不符合现实的.为了克服上述缺陷,Chen和Wu[10]以及韩万水等[11]都提出了将随机交通流模拟结合到车桥相互作用分析中的方法.在后续的研究中,Zhou和Chen[12-13]进一步提出了基于有限元(FE)的动态分析框架.在该框架下,他们建立了一个完全耦合的桥梁-交通系统综合动态交互和安全评估模型,其中所有车辆、桥梁和风的耦合效应都被同时包含在内.这些研究工作对风、桥梁、车辆和交通流的分析越来越准确.尽管如此,上述使用数值模拟的研究没有考虑到驾驶员的行为或者将其过度简化.
由于车辆的运动是外力作用和驾驶员行为共同作用的结果,所以有必要对驾驶员的反应进行研究.但在强风等危险条件下开展实车实验很难保障实验的安全.而驾驶模拟器能够避免驾驶员受到实际伤害,为进行高风险实验提供了一种可行的解决方案.随着驾驶模拟器的发展,它已成为研究驾驶行为最重要的工具之一.尽管利用驾驶模拟器开展驾驶安全性的研究[14-19]非常丰富,但基于驾驶模拟实验的侧风下驾驶安全性相关文献十分有限.Maruyama和Yamazaki[20]研究了在强侧风下车辆的运动稳定性,并比较了数值分析和驾驶模拟器实验的结果,但是研究中未考虑桥梁振动的影响.
综合以上研究,本文基于已有的风-车-桥耦合计算理论得到的桥梁振动数据,建立了同时包含侧风和桥梁振动作用的驾驶模拟场景.通过驾驶模拟实验证实同时考虑侧风和振动作用与单纯考虑侧风作用对车辆行驶的影响存在显著差异.该实验方法可为进一步研究大跨桥梁上的行车安全与驾驶行为等问题提供条件,研究成果也可为交通管理,风障设计提供一定的参考.
1 桥梁振动作用
1.1 风车桥耦合作用理论
大跨桥梁通常建在海峡或大江大河等经常遭受强风的区域.由于大跨桥梁柔性较大,在强风和车辆荷载的共同作用下产生的桥梁振动可能对交通安全产生重大影响.为了实现振动作用与驾驶模拟场景的融合,需要首先计算风-车-桥耦合作用下桥梁振动对车辆产生的力和力矩.在前人研究基础上,通过以下方法进行桥梁振动的计算.
本研究将大跨度斜拉桥建立为三维有限元模型,使用两种类型的单元:一是基于Timoshenko梁理论,采用非线性空间梁单元对桥梁和桥塔进行建模,该模型同时考虑了轴向、弯曲、扭转翘曲和剪切变形效应;二是根据精确的弹性悬链线元微分方程解析表达式导出的悬链索单元对拉索进行建模[21].
本研究中的车辆类型为卡车,其动力学数值模型由一个主刚体,两个轮轴组,一套垂直或横向的16个弹簧和阻尼器组成[22].桥梁上的交通流不是车速和车辆间距恒定的车辆列队,而是利用元胞自动机(CA)模型对随机交通流进行模拟,更接近真实大跨桥梁上的交通状况[10].当车辆在桥上行驶时,桥梁与车辆之间的相互作用力以耦合矩阵和外力的形式表达,并将整合到整个系统的运动方程中.该方法已用商业有限元程序通过非线性静态分析、模态分析和动态分析进行了验证[13].
1.2 桥梁振动对车辆的作用
已有的驾驶模拟研究仅单独考虑侧风作用,而本研究所建立的驾驶模拟场景融入了风-车-桥耦合的复杂作用,包括风-车相互作用与交通和侧风作用下的车-桥耦合作用.本研究中卡车模型的质量设为4 300 kg,车身的俯仰转动惯量和横摆转动惯量分别为9 550和3 030 kg·m2.斜拉桥模型的主跨和总长分别为372.5和840 m,桥面采用钢制双箱横截面,宽28 m,高4.57 m.其他动态参数参考Zhou和Chen[22]的实验研究进行设定.根据风-车-桥耦合作用理论,分别计算风速为40、50和60 km·h-1下,桥梁振动对车轮产生的力.由于驾驶模拟器软件的限制,需将4个轮子上的力转换为作用在车辆质心处的竖向力、侧向力和侧翻力矩,因此侧向力与侧翻力矩的相位是相同的,计算结果如图1所示.由于车辆模型前后轴受到的侧向力大小和方向基本相等,因此对车辆产生的偏航力矩忽略不计.由图1可知,竖向力最大值为104N左右,产生约2 m·s-2的竖向加速度.在桥梁主跨两端,即桥塔区附近时,桥梁振动作用较小,车辆继续行驶,振动作用逐渐增大,并在桥梁中部达到最大.车-桥耦合作用随风速的增大而增大,侧向力和侧翻力矩的增长幅度比竖向力大.
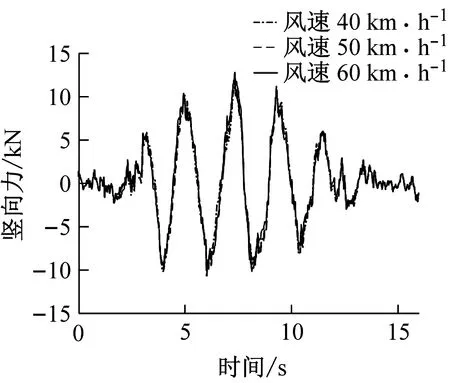
a 竖向力

b 侧向力
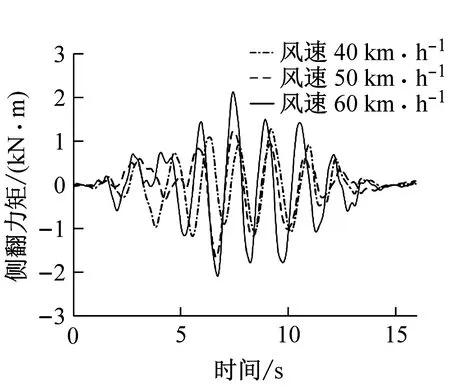
c 侧翻力矩
2 驾驶模拟场景建立
2.1 驾驶模拟实验方案设计
本实验基于同济大学八自由度驾驶模拟器进行.实验中采用的车辆类型为卡车,设计车速为80 km·h-1,桥梁横断面为双向四车道,车道宽度为3.75 m,两侧各有2.5 m的硬路肩及护栏.为保证驾驶模拟实验的有效性和可操作性,先通过预实验,以车辆行驶状态为依据,确定实验加载的风速.实验表明,风力4级(20~28 km·h-1)以下对车辆行驶无明显影响,5-6级(29~49 km·h-1)时有一定影响,7级(50~61 km·h-1)时有显著影响,8级(62~74 km·h-1)以上时驾驶员难以进行操控,车辆与护栏极可能发生碰撞.因此选取40、50和60 km·h-1为实验风速,风向与车辆行驶方向垂直,从右向左或从左向右产生作用.依次加载不同风速和风向的侧风,侧风持续作用时间为10 s,两段风之间设置20 s的无风段让驾驶员恢复到正常行驶状态.
为研究桥梁振动对行车安全的影响,实验设置两种对照情况:无振动和持续振动.无振动情况为侧风作用的前中后期皆无振动,持续振动情况为在侧风作用时期以及作用前后各10 s总共30 s内加载对应风速的振动作用.
根据风速、风向与振动情况的不同,本实验中每轮设计12种加载情况,如表1所示.为了提高实验效率,每组实验过程中车辆将受到2轮共24次作用.为防止驾驶员对即将产生的作用进行预判,实验中对侧风与振动组合情况的加载顺序进行随机设置.同时,为减少驾驶员操作熟练程度引起的误差,另外设置了一个驾驶模拟场景用于练习.

实验对象为20名驾驶员,包括17男3女,平均年龄31.7岁(标准差为8.44),平均驾龄为5.2年(标准差为2.91).考虑到驾驶经验的差异可能对遭遇侧风和振动时的反应产生影响,将驾龄大于等于5年的10名司机归为A组,驾龄小于5年的10名司机归为B组.其中A组驾驶员驾龄较长,驾驶频率为每天或每周2次以上,可代表经验相对丰富的驾驶员;B组驾驶员驾龄较短,且驾驶频率为每周1次以下,可代表经验相对欠缺的驾驶员.
每名驾驶员先通过练习场景熟悉驾驶模拟器的操作,之后进行正式实验.实验过程中随机加载侧风和振动.由于车速越高,侧风对车辆行驶的影响越显著.为了减少因车速不同造成的偏差,实验中要求驾驶员在无风段尽量以80 km·h-1的速度在车道中央行驶,但遭遇侧风时可根据自身判断操作油门、刹车和方向盘控制车速和方向,而在侧风作用结束后应恢复车速并驶回车道中心.最终每种风况和振动的组合获得40组有效数据.
2.2 视觉场景建立
视觉场景的逼真度在很大程度上决定了驾驶模拟实验的可靠性.本实验视觉场景依照某真实斜拉桥建立.该桥有一个主跨和两个分跨,主跨和全桥长度分别为372.5和840 m.使用SketchUp和Google Earth,建立桥梁及其周围地形的三维模型后,将模型导入到SCANeR中,完成大跨桥梁场景建立.经过调查问卷结果分析,参与实验的驾驶员普遍认为视觉场景的逼真度较高.图2展示了虚拟场景与实际场景的比较.

a 虚拟桥梁

b 真实桥梁
2.3 耦合作用融合
在驾驶模拟器中加入风-车-桥耦合作用是本研究中最重要的部分之一.为此,本研究考虑了振动和侧风两种外力作用.为了模拟桥梁振动,本研究专门编写了一个外部模块,可通过SCANeR软件中的命令将竖向力、横向力和侧翻力矩加载到实验场景中,以模拟桥梁振动对车辆的作用.得益于模拟器先进的八自由度运动系统,该方法可逼真地模拟风场中的桥梁运动.
在实际的桥梁上风速可能是渐变的,但为了控制风速变量并考虑行车最不利的情况,本实验中的侧风以突遇侧风的形式加载,即风速由0突然增大到特定速度,并保持恒定一段时间,最后突然消失.该侧风作用形式可视为对车辆通过桥塔区或进出隧道时的抽象和简化.侧风加载可通过软件自带的函数实现.
将侧风作用和第1节计算得出对应情况下的桥梁振动作用融入驾驶模拟场景,可实现对大跨桥梁复杂行车环境的模拟.与以往只考虑侧风作用的驾驶模拟实验相比,本研究的驾驶模拟实验方法考虑的因素更为全面,可为后续对大跨桥梁上的行车安全性、稳定性等问题的深入研究提供条件.
3 行车安全性影响分析
同济大学交通行为与交通安全模拟实验平台能够实时记录包括车辆动力学模型参数、交通参数、环境参数和驾驶员操纵参数在内的400多种实验参数.本研究通过驾驶模拟实验,从车辆行驶状态的角度初步探究桥梁振动对行车安全性的影响,验证本驾驶模拟实验方法的有效性.
车辆在行驶过程中受到侧风和桥梁振动横向作用的影响,若该作用足够大,车辆将产生偏移甚至滑移.横向偏移量是指车辆与目标行车轨迹的偏移距离,在本研究中定义为车辆中心与道路中心线之间的偏移值.当偏移量过大时,车辆将偏离原车道,可能与护栏或旁边的车辆发生碰撞.在Baker的驾驶员转向角模型[4]和郭孔辉提出的“预瞄最优曲率模型”[23]中,车辆的横向偏移量都是十分重要的参数.另外已有研究表明[24],在侧风作用期间,偏航角速度的时间历程决定了行驶感觉和驾驶员的反应,会影响行车路线.因此,本研究选择车辆的横向偏移和偏航角速度来分析评价风-车-桥耦合作用下车辆的行驶稳定性和安全性.
3.1 横向偏移总体变化趋势
横向偏移的总体变化趋势能够描述车辆在遭遇侧风或振动作用时与车道偏移的总体规律.以侧风开始作用的时刻为0,作用时间持续10 s,提取所有驾驶员每次在各侧风作用全程的横向偏移数据,绘制横向偏移曲线图.因为左侧风和右侧风对车辆的作用是对称的,因此定义横向偏移方向与侧风方向一致时为正值,将风速相同方向不同的样本统一进行分析.图3中的3幅图分别展示了两组驾驶员在持续振动且风速为40 km·h-1、持续振动且风速为60 km·h-1和无振动且风速为60 km·h-13种外力作用状态下的横向偏移量变化的全过程过程.为便于观察,在图3中绘制了横向偏移为0和0.825 m两条直线以供参考.
由图3可知,A组经验丰富驾驶员和B组经验相对欠缺驾驶员的横向偏移总体变化趋势较为一致.其中值得注意的有三点.首先在侧风开始作用的时刻,横向偏移量在0左右,说明在车辆受到外力干扰前能够正常地保持在车道中心行驶.二是侧风作用的初期,横向偏移朝侧风作用方向增加,一段时间后达到峰值,说明突遇侧风时,车辆不可避免地被干扰,且驾驶员控制横向偏移不再增大需要一定时间.三是横向偏移到达峰值后开始减小,之后呈现出两种变化趋势.一些车辆的横向偏移迅速减小到0左右,但之后波动较为剧烈,其原因可归结于该部分驾驶员迫切地想要驶回车道中心,对方向盘施加了较大的反向作用力抵消并超过外力的作用,但当车辆接近车道中心后,并不能精确地控制方向盘,使车辆保持直线行驶,而是过度减小了方向盘上的力,又被外力影响偏离车道中心,之后反复与外力进行博弈,横向偏移持续波动.该类驾驶员的驾驶行为是比较剧烈的,横向偏移偏大的持续时间较短,但波动较大.另一部分车辆的横向偏移缓慢地减小,基本上呈现单调递减的趋势,而不是上下波动,其原因是该类驾驶员在控制住车辆的横向偏移不再增大后,仅仅控制方向盘的角度略大于能与外力平衡的角度,使车辆较为平缓地驶回车道中心.该类驾驶员的驾驶行为是比较温和的,横向偏移偏大的持续时间较长,但波动较小.
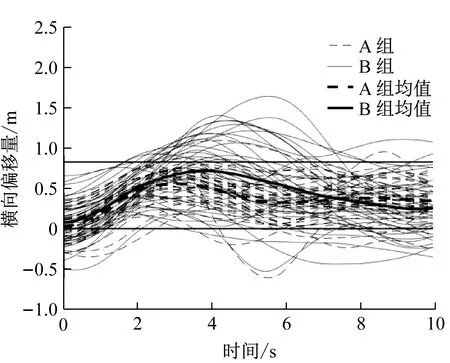
a 持续振动且风速为40 km·h-1
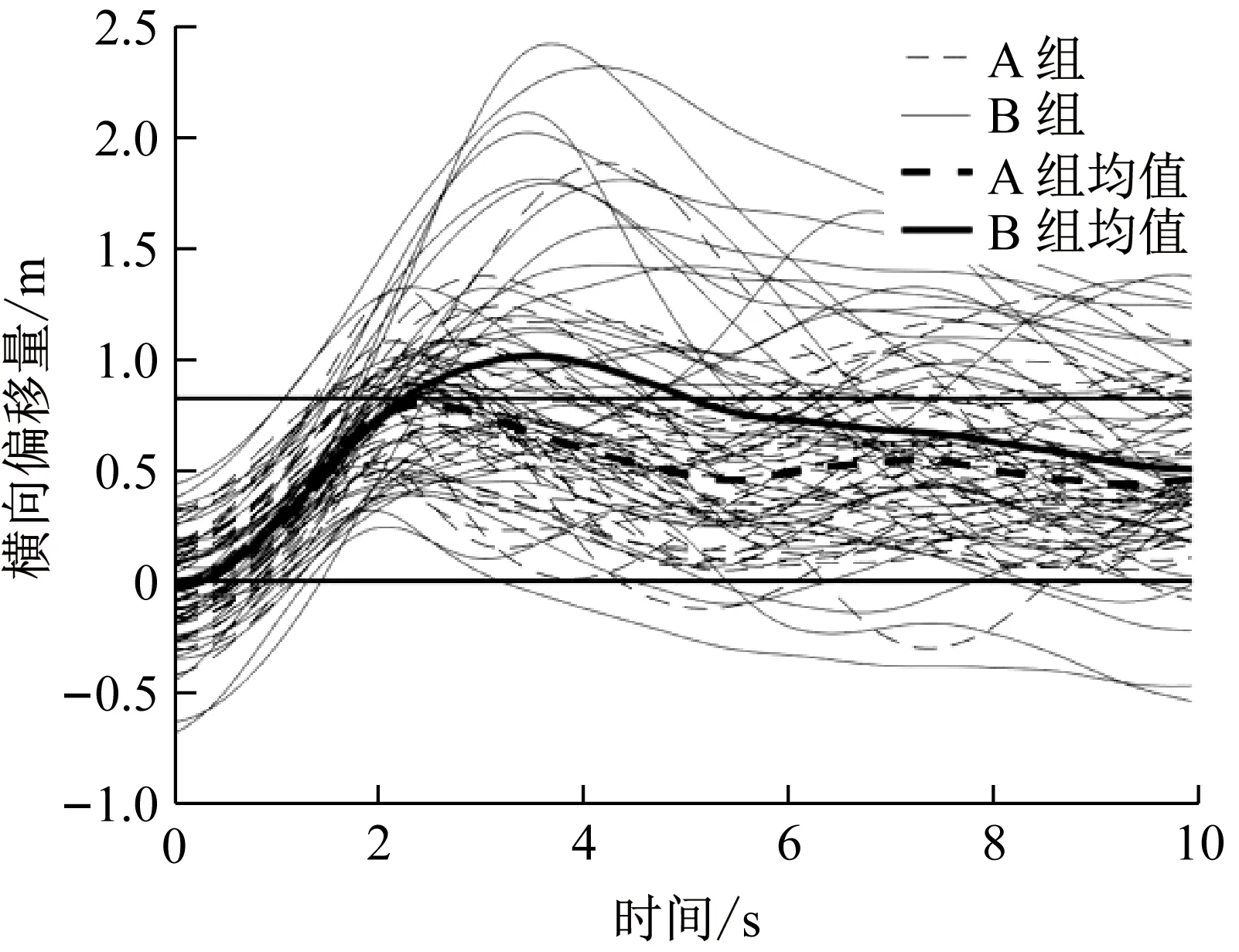
b 持续振动且风速为60 km·h-1
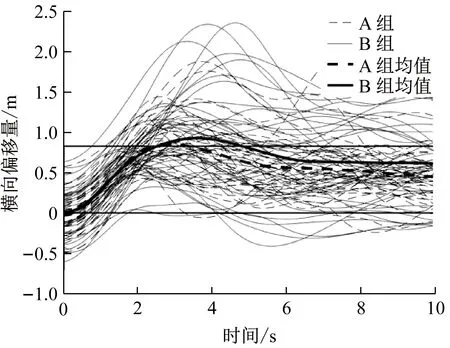
c 无振动且风速为60 km·h-1
为了更方便地观测A组和B组两组驾驶经验不同样本的车辆横向偏移变化趋势,分别取各时刻横向偏移量的均值绘制曲线,如图3中的粗线所示.虽然取均值的方法抵消了一部分样本的波动,不能展现一些样本自身的特点,但能观测到总体的变化趋势.对比图3a和3b可知,随着风速的增大,初期横向偏移均值的增长更剧烈,横向偏移均值的最大值有所增大.对比图3b和3c可知,侧风作用后期,横向偏移的波动在包含持续振动的情况比无振动的情况更大.
3.2 横向偏移初始值分析
根据实验要求,各驾驶员在无侧风作用阶段应尽量保持在车道中心行驶.将横向偏移初始值定义为各种情况的侧风开始作用时刻的横向偏移值.要注意的是,该时刻车辆还未受到侧风作用,但对于考虑车-桥耦合作用的场景,车辆会受到对应风速下桥梁振动的作用.根据统计分析结果,各风况下横向偏移初始值均服从正态分布,均值分布在-0.089~0.175 m的范围内,无明显规律.横向偏移初始值的方差反映了其离散程度,方差越小说明数据分布越集中.各情况下横向偏移初始值的方差对比如图4所示.由图4可明显看出:各风速下A组方差均小于B组方差,说明经验丰富的驾驶员能更精确地将车辆保持在车道中心线行驶.比较各风速下无振动情况和持续振动的方差可知,除A组风速为40 km·h-1一种情况外,在同一风速下,持续振动情况下的方差均值小于无振动情况.其原因可归结为驾驶员在感受到振动的干扰后更加注意对车辆横向偏移的控制,偏移量更集中.若不考虑驾驶员行为,振动作用应使横向偏移初始值更为离散,与实验结果相反,这也说明在研究车辆行驶安全性与稳定性问题时,仅考虑车辆动力学是有缺陷的,体现了对驾驶行为研究的重要性.

图4 横向偏移初始值方差对比
3.3 横向偏移最大值分析
横向偏移最大值可衡量外力作用对行车状态影响的严重程度,也与驾驶员各种操作行为相关.对各情况下样本的最大横向偏移量求均值,绘制折线图,如图5所示.由图5可知,相同风速下,A组横向偏移最大值的均值小于B组,说明经验丰富的驾驶员对车辆横向偏移的控制能力更强.
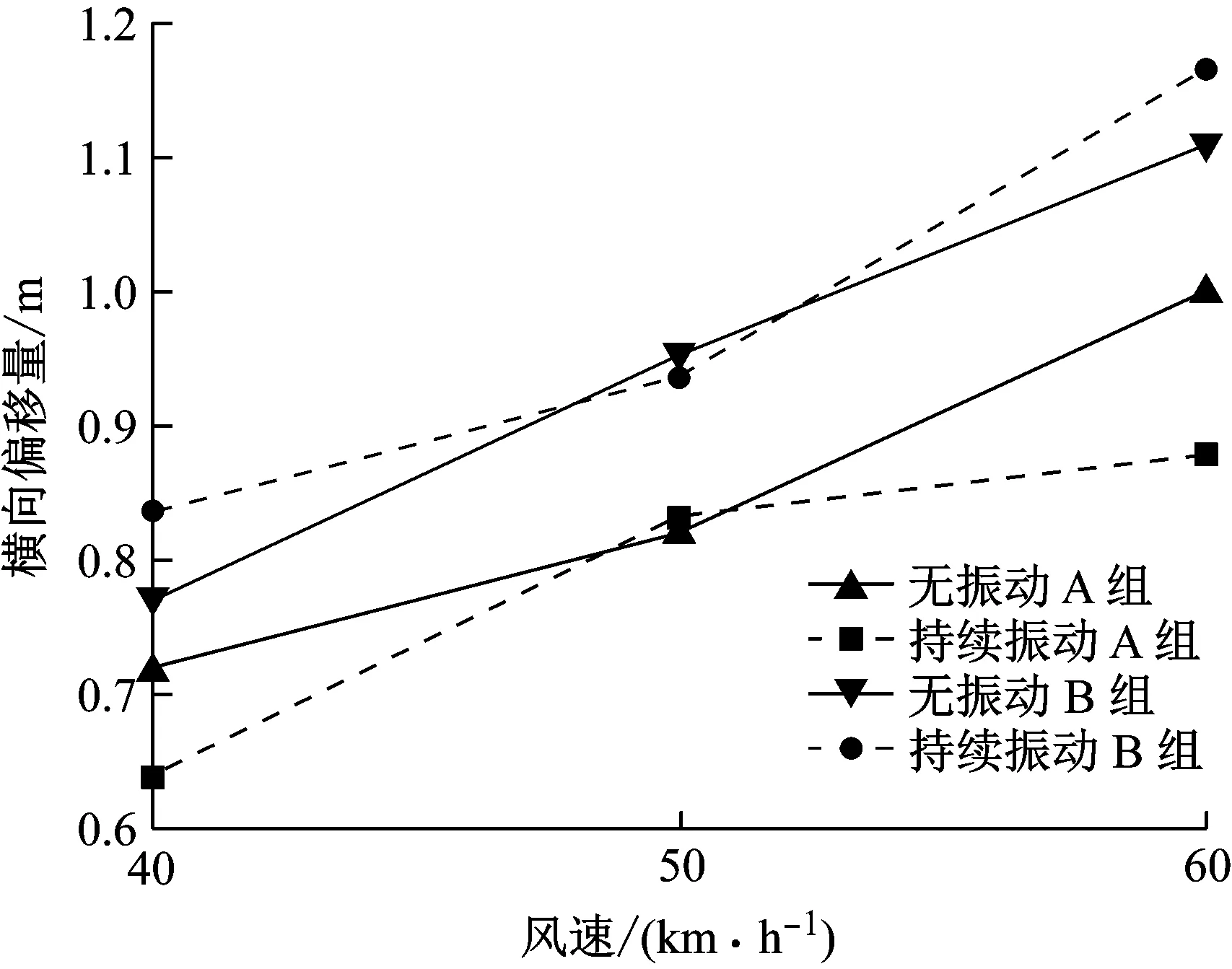
图5 横向偏移最大值均值对比
值得注意的是,对经验丰富驾驶员和经验相对欠缺的驾驶员,桥梁振动作用的影响呈现出不同的规律.对A组风速为40和60 km·h-1的样本,持续受到振动影响时的横向偏移最大值小于无振动影响情况.这是由于经验丰富的驾驶员在侧风作用前已察觉到桥梁振动对车辆的影响,驾驶行为更加谨慎,并且该类驾驶员对桥梁振动的应对能力更强.总体而言,桥梁振动的警示效果产生的正面效应大于干扰效果产生的负面效应.对于经验相对欠缺的驾驶员,虽然可能也察觉到了车辆行驶的异常,但当侧风与桥梁振动共同作用时,其对车辆的控制能力不足,导致横向偏移最大值大于无振动情况.总体而言,桥梁振动的干扰效果产生的负面效应大于警示效果产生的正面效应.这也是本研究的一项重要发现.
3.4 车辆横向偏移危险状态分析
实验中行车道宽度为3.75 m,卡车宽度为2 m,当车辆中心与车道中心线重合时,车辆边缘与车道边线的距离为0.825 m.若车辆偏离原车道,则可能与护栏或相邻车道内的车辆或护栏发生碰撞,造成交通事故.因此本研究中将车辆横向偏移大于0.825 m定义为危险状态.统计各外力作用情况下车辆处于危险状态的累计时间平均值,绘制折线图如图6所示.A组驾驶员的危险状态的累计时间平均值小于B组,说明经验丰富驾驶员的操控能力和驾驶安全性更高.车辆处于危险状态的累计时间随风速增大而增大.在风速为60 km·h-1的情况下,B组驾驶员超过1/3的时间都处于危险状态,说明该风速和振动对行车安全极为不利,应采取车辆限速、设置风障等措施保障安全.
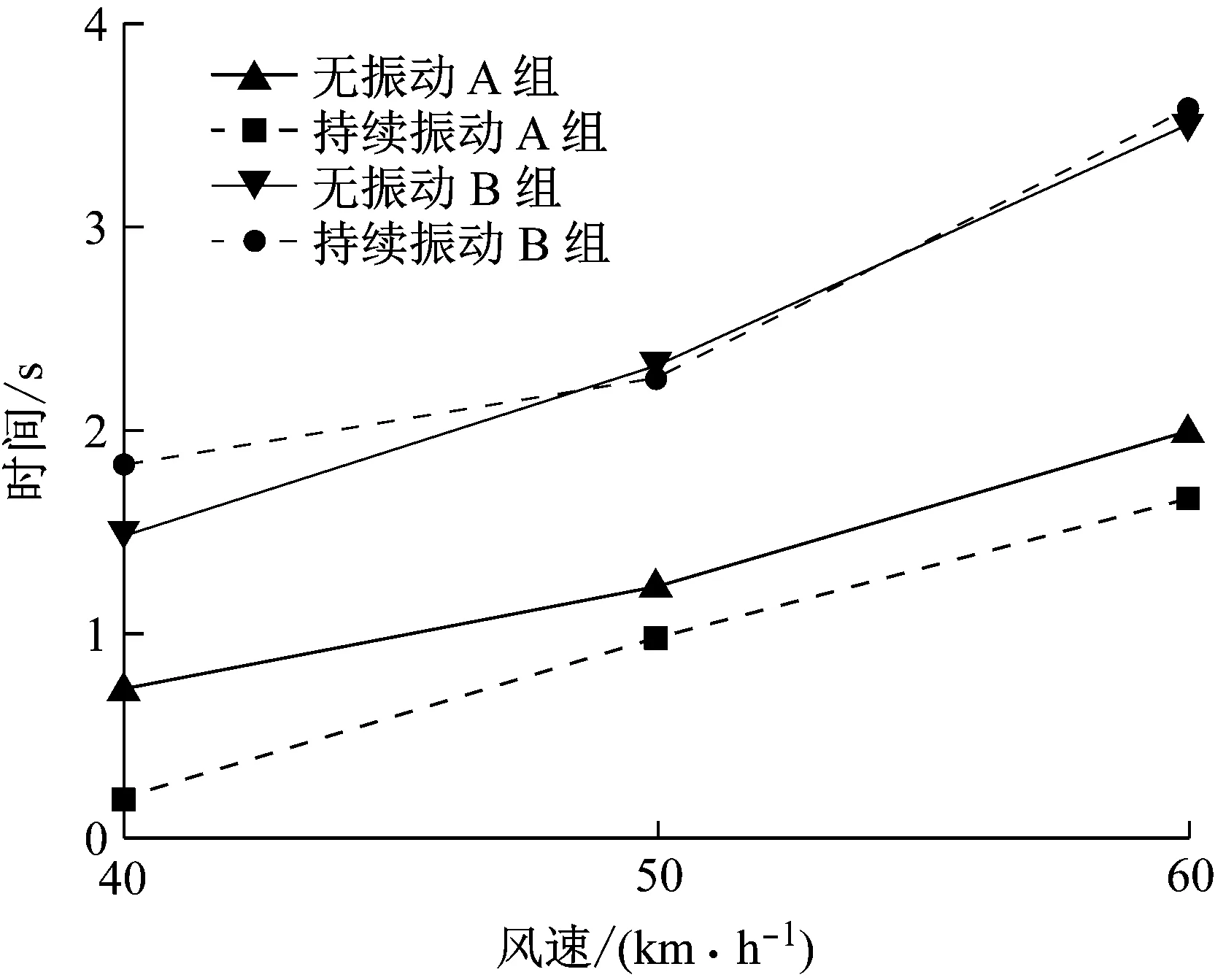
图6 危险状态累计时间对比
振动作用下,A组驾驶员处于危险状态的累计时间比无振动仅有侧风的情况少,从另一个角度再次说明对于经验丰富的驾驶员,持续的振动使其对可能发生的危险状况保持更高的警惕性,对行车安全是有利的.B组驾驶员在振动作用下处于危险状态的累计时间比无振动情况有所增加,说明桥梁振动作用对行车安全不利.
总体而言,在同样的行车条件下,经验欠缺的驾驶员的横向偏移最大值更大,处于危险状态的累计时间更长,行车安全性更低.因此在桥梁设计、运营管理、车辆预警系统设计中应以能保障经验相对欠缺的驾驶员的行车安全为标准.
3.5 偏航角速度分析
以风速为50 km·h-1有无振动两种情况为例,绘制两组驾驶员的偏航角速度变化曲线,如图7所示.偏航角速度随时间的变化可以分为两个阶段.第一个阶段,在横向干扰作用初期,车辆偏航角朝侧风作用方向增大,此时驾驶员处于感知判断阶段,偏航角在外力的作用下达到第一个峰值.在第二个阶段,驾驶员开始对侧风影响进行操作反应,反打方向盘使车辆朝着侧风作用的反方向偏转,但由于操纵急促导致车辆偏航角反向增大达到第二个峰值,之后在不断的修正操作中,车辆偏航角呈现波动变化.
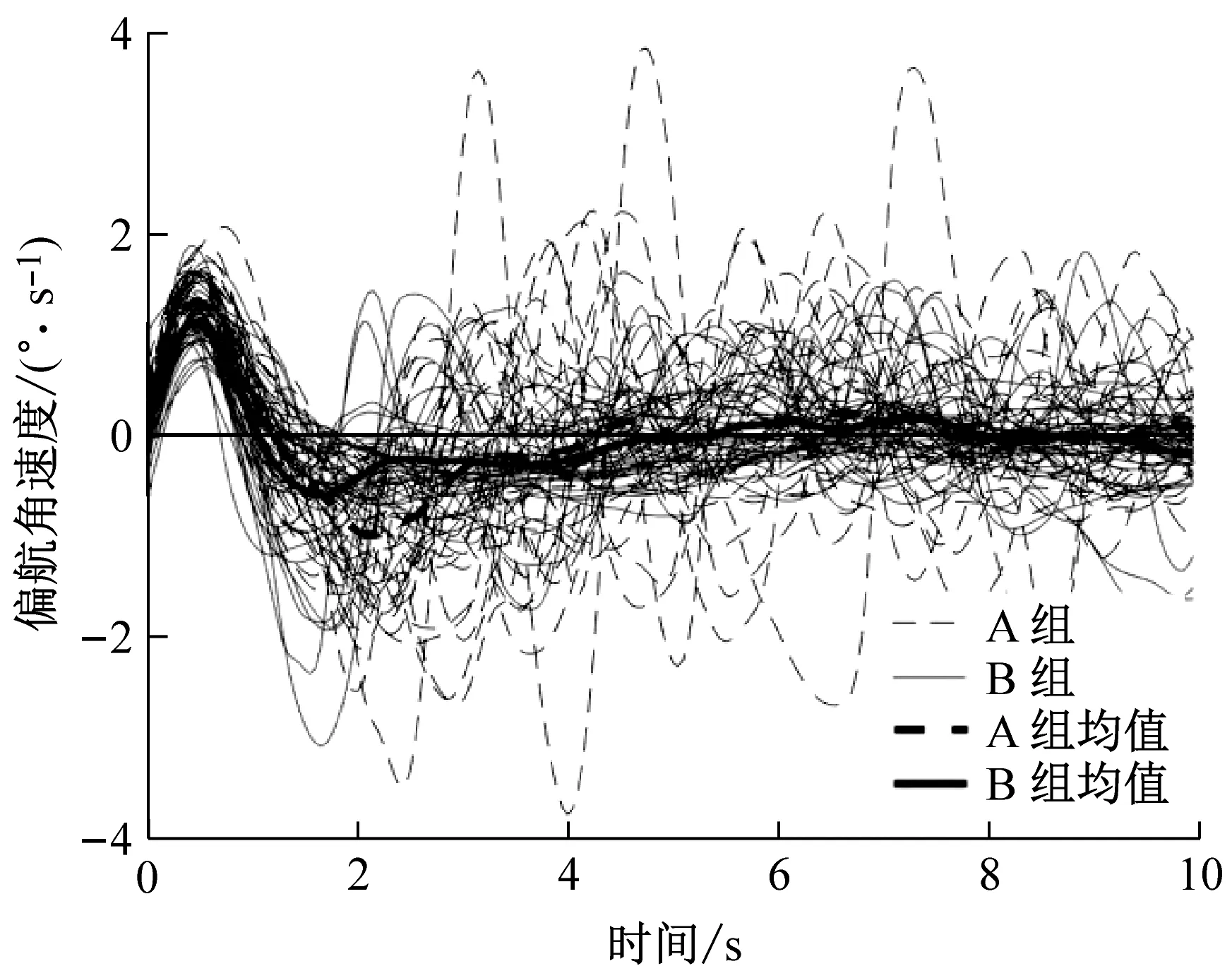
a 无振动
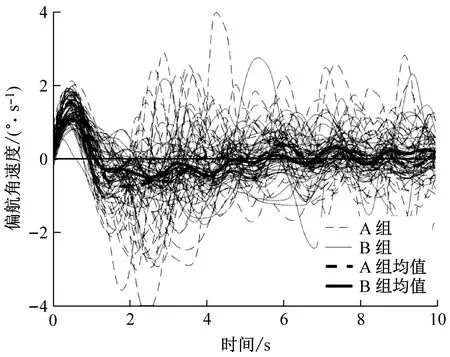
b 持续振动
图7 偏航角速度变化过程
Fig.7 Yaw speed changing process
是否考虑振动作用的差异主要体现在外力作用后期,由图7可知,侧风开始作用4 s至作用结束的时期内,车辆受到持续振动的情况下,偏航角速度的波动比无振动情况更为剧烈.通过方差分析可知,持续振动和无振动情况下方差的平均值分别为0.21和0.27(°·s-1)2,验证了以上现象.说明车-桥耦合作用会增大驾驶员控制偏航角变化的难度,对行车稳定性不利,在研究中应予以重视.本研究较以往关于大跨桥梁侧风作用下的驾驶模拟研究而言,可考虑风-车-桥耦合作用下的桥梁振动,更加精细化地分析桥梁环境交通运行安全.
4 结语
(1) 根据风-车-桥耦合作用理论,计算了三种风速下桥梁振动对车辆的作用.并基于风-车-桥耦合计算结果,建立了同时考虑侧风作用与桥梁振动作用的驾驶模拟场景.
(2) 通过驾驶模拟实验,对车辆横向偏移、偏航角速度数据进行分析,发现桥梁持续振动对所有驾驶员都会产生干扰作用,对经验欠缺驾驶员干扰作用较大,但对部分经验丰富的驾驶员而言警示作用大于干扰作用.总体而言,桥梁振动对经验相对欠缺的驾驶员不利,对经验丰富的驾驶员反而有利.振动还会导致侧风作用后期偏航角速度的波动更剧烈.
(3) 本研究提出了基于驾驶模拟实验,针对风-车-桥耦合作用下大跨桥梁上的行车安全问题的研究方法.总结了桥梁振动及突遇侧风对车辆行驶影响的规律,可为桥梁运营管理、车辆预警系统设计等提供参考.本研究仅针对车辆运行状态,下一步将考虑主梁模态变形对驾驶行为的干扰和错觉影响,针对驾驶员行为进行深入研究,并建立侧风影响下的桥梁驾驶环境驾驶员行为模型,可为风-车-桥耦合作用下的交通安全分析与评价提供基础.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
铁道建筑(2021年10期)2021-11-08
气象与环境科学(2021年4期)2021-08-27
中国电业与能源(2020年5期)2020-06-16
活力(2019年22期)2019-03-16
现代职业教育·中职中专(2017年11期)2017-07-09
风能(2016年11期)2016-03-04
弹箭与制导学报(2015年1期)2015-03-11
