空盒气压表检定压力控制器的设计及应用
2019-06-26 09:19茅晓晨
仪器仪表用户 2019年7期
茅晓晨
(上海市计量测试技术研究院,上海 201203)
空盒气压表检定设备可以实现气压示值和温度系数的自动检定,提高仪表检定、校准的工作效率以及操作准确度,简化计量工作流程,降低工作强度。
1 空盒气压表检定
1.1 动作过程
压力控制的动作过程为:设备启动时真空泵、DT1高压电磁阀、DT2低压电磁阀都给电。泵的DT1高压电磁阀用于给后端增加压力,而DT2低压电磁阀用于给后端减小压力。需要注意的是,高压和低压两侧各有一个节流阀,分别用来调节正负气压流量的(规程要求5hPa/min),气体流量的大小直接影响气压室的压力值精度和稳定性[1]。
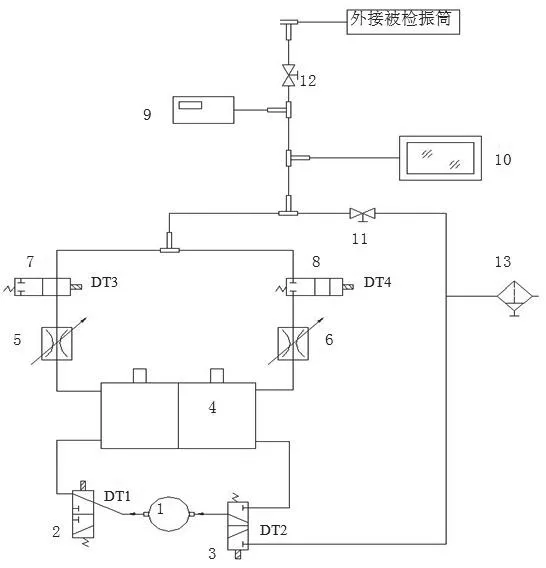
图1 示值检定箱气动原理图Fig.1 Aerodynamic schematic diagram of the display value verification box
1)当箱内气压<检定点气压时,真空泵对DT1高压电磁阀加压,当箱内气压达到预先设定的高压缓冲罐气压时(略高于检定点),真空泵和DT1高压电磁阀断电,同时打开DT3高压稳定阀,使得高压缓冲罐和箱内气压相通,以调节箱内气压。当箱内气压达到设定点时,使DT3高压稳定阀关闭,箱内进入保压阶段,达到一定时间后进行电磁铁敲击,再进行送检空盒气压表读数。
2)当箱内气压>检定点气压时,真空泵对DT2低压电磁阀减压;当箱内气压达到预先设定的低压缓冲罐气压时(略低于检定点),真空泵和DT2低压电磁阀断电,同时打开DT4低压稳定阀,使得低压缓冲罐和箱内气压相通,以调节箱内气压。当箱内气压达到设定点时,使DT4低压稳定阀关闭,箱内进入保压阶段,达到一定时间后进行电磁铁敲击,再进行送检空盒气压表读数。
1.2 控制变量
根据图1所示的检定箱气动原理图,可以整理归纳出要控制的节点类型[2]。
DO1:真空泵继电器
DO2:DT1高压阀继电器
DO3:DT2低压阀继电器
DO4:DT3高压稳定阀继电器
DO5:DT4低压稳定阀继电器
DO6:电磁铁继电器(手动)

图2 检定系统软件界面图Fig.2 Software interface diagram of verification system
AI1:高压缓冲罐压力传感器
AI2:低压缓冲罐压力传感器
AI3:气压箱压力传感器
AI4:气压箱温度传感器
AI5:气压标准器(mA或者232输出)
检定设备可对3种气压仪器进行检定:
1)空盒气压表,包括平原空盒表(800 hPa~1050hPa)检定点依次为:1050、1010、960、910、860、810、800、810、860、910、960、1010、1050,共13个检定点。高原空盒表(500hPa~1050hPa),检定点依次为:1050、1010、960、910、860、810、760、710、660、610、560、510、500、510、560、610、660、710、760、810、860、910、960、1010、1050,共25个检定点。
2)空盒气压计,检定过程同样是高压至低压再至高压(900hPa~1050hPa),检定点依次为:1050、1010、960、900、960、1010、1050,共7个检定点。
3)振筒类气压仪,检定装置预留了多个机械分支口与气压箱相通以放便检定连接。
因此,控制系统与检定点对应的变量表包括:m总检定点数、n换向点数、P[m]逐个检定点气压值。由于被检气压表没有电信号接口,需要人工输入各个被检表的示值。
1.3 温度系数
空盒气压表附属温度表标度范围为-11.0℃~41.0℃,最大允许误差为±1.0℃。温度系数Kt用公式求出:
Kt=(∆P1-∆P2)/(t1-t2)(hPa/℃,取两位小数)
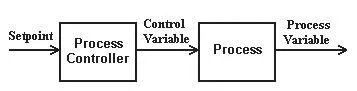
图3 开环控制图Fig.3 Open-loop control chart

图4 闭环控制图Fig.4 Closed-loop control chart
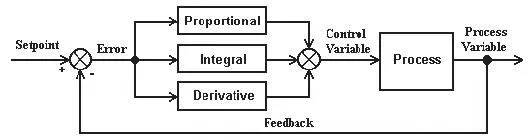
图5 控制过程图Fig.5 Control process diagram
式中:∆P1在高温点,标准气压值和空盒气压表、空盒气压计气压示值的气压差值,hPa;∆P2在高温点,标准气压值和空盒气压表、空盒气压计气压示值的气压差值,hPa;t1高温点的温度值,℃;t2低温点的温度值,℃。具体温度系数的数值要求范围见《JJG272-2007空盒气压表和空盒气压计检定规程》表1中的内容[3,4]。

图6 寄存器设置图Fig.6 Register setup diagram
2 PID控制原理
PID控制包括定位点设置、偏差计算、比例控制、积分控制和微分控制。PID控制算法包括IND和ISA两种方式:
dt是测量时间,Derivative是导数值,可以为(当前误差-以前误差)/dt,也可以配置为(当前测量值-以前测量值)/dt,Ti是积分时间,Td是微分时间。K是按PVstep/Cvstep计算开环增益。Kp是比例增益,最终反馈给系统的错误值的数量。Ki是积分增益,时间越快,积分部分的增益就越大。Kd是导数增益,表示有多少变化率反馈给系统。SP是设定点,为需要达到和维护的值。PV是过程变量,为过程的测量输出的压力值。CV是控制变量,将PID函数应用于控制过程的结果,而这个值包含比例、积分、微分和偏置的分量[5]。
IND方式采用标准PID算法,调节效果更精确,适用于专家级或精度要求严格的项目。而ISA方式调节简单、快速,但精度效果一般,适用于初级应用或精度要求一般的项目。在一些典型的工业过程控制中,往往需要控制一个过程参数,如温度或压力值,可以应用开环控制。
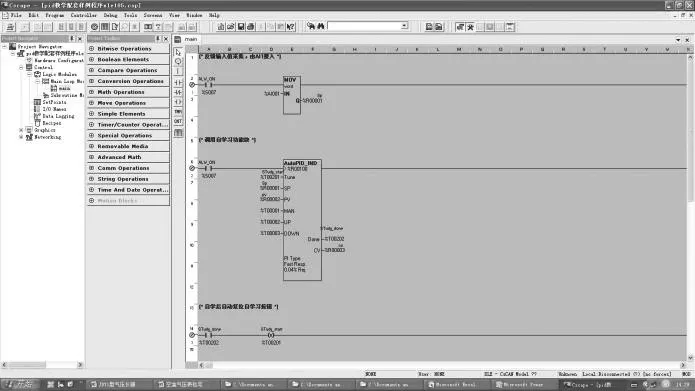
图7 PID功能模块调用梯形图Fig.7 PID Function module call trapezoidal diagram
在这样的系统中,控制器接收来自用户的设定值。然后控制器生成一个值再发送,称为控制变量。而所需的参数是流程变量,它根据流程控制器发送的值进行更改。流程控制器无法确定流程是否实际生成了正确的流程变量[6]。
在要求响应速度的许多情况下,这就足够了。但这些假设往往是不正确或不准确的。大多数过程控制系统使用闭环反馈,也做闭环系统。动作的控制器称为比例控制器。实际上,误差实际上是全范围误差的一部分(通常用百分比表示)。控制过程需要更长的时间,但是完全控制更准确。图5仅为比例控制下的典型过程。
PID功能块地址、期望值寄存器地址、过程值寄存器地址、控制值寄存器地址、手动控制寄存器地址、手动上升寄存器地址、调节参数设置选项、自学习功能选项、手动下降寄存器地址。
3 结论
研究了空盒气压表气压示值误差和温度系数的检定过程,依据示值检定箱执行机构的气动工作原理,整理出控制方案,空盒气压表检定设备可以实现气压示值和温度系数的自动检定,提高了仪表检定/校准的工作效率。
猜你喜欢
纺织标准与质量(2022年4期)2022-09-05
纺织标准与质量(2022年1期)2022-07-12
水泵技术(2022年2期)2022-06-16
设备管理与维修(2022年6期)2022-04-22
有色金属设计(2022年4期)2022-02-04
水泵技术(2021年2期)2021-07-31
计算机应用(2020年5期)2020-06-07
造纸信息(2019年7期)2019-09-10
质量技术监督研究(2018年1期)2018-03-26
电子技术与软件工程(2018年1期)2018-03-22