自动驾驶车辆中驾驶人的信息需求特征
2019-06-25 08:49:00邢慧宁钮建伟
城市交通 2019年3期
邢慧宁,秦 华,2,钮建伟
(1.北京建筑大学机电与车辆工程学院,北京 100044;2.北京市建筑安全监测工程技术研究中心,北京 100044;3.北京科技大学机械工程学院,北京 100083)
0 引言
自动驾驶是当今社会研究的一大热点,自动驾驶汽车被认为能够提高舒适度、降低事故的发生率、减少交通拥堵以及减少环境影响[1]。美国国家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)根据对自动驾驶系统的定义,将自动驾驶系统划分为5 个等级[2],分别为:等级0,无自动化;等级1,特定功能自动驾驶;等级2,集成功能自动驾驶;等级3,有条件自动驾驶;等级4,完全自动化。
目前车辆自动驾驶系统还未达到完全无人驾驶的程度,只能提供一些驾驶辅助操作,例如,提供使车辆以期望的速度稳定行驶、实现自主导航行驶等功能[3-4]。但当遇到一些突发状况时,自动驾驶系统无法自行处理,需要由驾驶人接管控制车辆并做出决策。在由自动驾驶系统操控到真人操控的切换过程中还存在很多问题[5],例如驾驶人反应时间、车辆性能、人机交互等方面[6-7]。而且在自动驾驶系统控制车辆行驶的过程中,驾驶人从操控者变成了监督者的角色[8],这种角色的转变会降低驾驶人的警觉性。由于对自动驾驶系统的过度信任[9],驾驶人不会一直监督自动驾驶系统[10-11],而会做一些与监督驾驶任务无关的事情,例如听音乐、打电话等第二任务,致使注意力分散、情景意识缺失,期间缺乏对车辆行驶的状况及周围环境状况的足够了解。因此,降低自动驾驶系统的使用所带来的消极影响,研究驾驶人在不同的第二任务中的信息需求,帮助其快速了解当前突发状况很有必要。
文献[12]对高速公路上不同自动驾驶等级下驾驶人的信息需求进行研究,确定了一些在自动驾驶系统使用过程中必不可少的重要信息,其中人机交互专家们认为最重要的一点就是系统行为的反馈应该是透明的、可理解的以及可预测的,包括当前的系统状态、回退水平、剩余时间、行驶计划及其原因。文献[13]从定性以及定量方面对城市道路场景中警告信息的呈现时间以及呈现间隔进行总结,并根据显示信息的复杂度进行分类,根据信息来源总结了近150 种不同的信息需求。通过研究城市道路中高级驾驶辅助系统(Advanced Driver Sssistance Systems,ADAS)中抬头显示器(Head-Up Display,HUD)和低头显示器(Head-Down Display,HDD)分别呈现哪种警告信息类型,发现用户对抬头显示器中紧急警告信息,诸如导航或当前行驶速度等动态信息以及驾驶相关内容(交通标志识别)等信息具有明显偏好。同时,认为状态信息和指示标志在抬头显示器中具有干扰作用,只要在特定的时间间隔呈现这些信息和标志(开/关/激活)即可[14]。
以上研究主要是针对高速公路上的驾驶信息需求以及国外城市道路的驾驶信息需求。而中国城市道路的交通情况有其特殊性[15]:1)随着城镇化建设的加速,车辆保有量急剧上涨,造成交通拥堵;2)车流混杂,道路中存在各类交通参与者;3)驾驶人行为意图难以预测,存在不按交通规则驾驶车辆的现象。
本文基于中国城市道路的特点,研究在城市道路场景的自动驾驶车辆中,驾驶人处于不同的第二任务中的信息需求。
1 实验设计
为了研究自动驾驶车辆中驾驶人的信息需求,评估处于不同的第二任务中信息对驾驶人的重要程度,利用自动驾驶模拟平台进行实验研究。根据中国城市道路场景的特点以及交通事件发生的频率和危险程度[16],选取和设计了6 种常见的城市道路场景,参试者分别在6 种道路场景中模拟自动驾驶,并在实验结束之后完成信息需求问卷。
1.1 自动驾驶模拟平台和实验场景设计
实验在中国标准化研究院的虚拟现实与仿真实验室完成,实验平台如图1所示。
6 种城市道路典型场景分别为:场景1,交通拥堵行驶缓慢,需要驾驶人多次启动、制动的道路场景;场景2,十字交叉口,人车混杂的道路场景;场景3,前方有车辆不停变换车道的道路场景;场景4,公共汽车出站强行占道的道路场景;场景5,前方出现车辆交通事故的道路场景;场景6,前方车辆紧急制动的道路场景。
1.2 实验任务及过程

图1 实验平台Fig.1 Experimental platform
实验的参试者共12人,年龄介于22~47岁(均值为 26.25 岁),驾龄为 1~16年(均值为3.21年),在此之前没有任何使用自动驾驶系统的经验。将参试者随机分为2 组,每组6人。第一组参试者需要实时监控驾驶任务,为监控任务组。第二组参试者不需要实时监控驾驶任务,需要完成一些与驾驶任务无关的任务(第二任务),为第二任务组。第二任务又称为二级任务、次要任务或次任务等,是指相对于控制车辆、保持车道、监控道路状况等主驾驶任务而言,与驾驶无关或不直接相关的其他任务,如收听广播、使用手机、看地图、与乘客交谈等[17]。无第二任务的情况下,要求参试者注意力完全集中于监控任务。第二任务组中,参试者需要完成三种不同的第二任务,分别为聊天、编辑文档和看电影。
实验开始之前,首先实验人员向参试者介绍实验内容和实验任务,让参试者了解该实验的研究目的。然后,参试者签写书面《知情同意书》并填写个人基本信息表。在进行正式实验之前,每名参试者有10 min的时间熟悉实验环境以及自动驾驶模拟系统。
实验过程中,使用头戴式眼动仪追踪参试者眼球的注视行为,通过iView X 软件将参试者眼球注视行为记录成视频,随后通过BeGaze3.3 分析软件对所录视频进行分析,得到参试者眼球在各个位置的注视时间。当参试者每完成一种场景的驾驶任务后都需要完成一份问卷调查,并基于其实验场景对自动驾驶过程中所需求的信息进行重要度评估。在完成当前场景的调查问卷后便开始下一个场景的实验,直到6 个场景的实验全部完成,实验结束。
2 结果分析与讨论
2.1 问卷结果统计
将参试者对每个场景中每项参数的评分进行汇总,然后基于“二八”原则对收集到的数据进行处理。结果如表1~表3所示。

表1 汽车信息Tab.1 Automobile information
由表1 可知,监控任务组中,反光镜情况、车辆当前行驶速度、后视镜情况和车辆盲点占的比例很大;第二任务组中,与监控任务组相同,同样是这些信息占的比例较大。说明两组驾驶人均认为这些信息很重要,只是在不同的任务中,这些信息的重要度顺序不同。
由表2 可知,监控任务组中,当前场景的危险程度、与两侧车道车辆的距离和车头时距等信息占的比例较大,而第二任务组中,当前路段的交通标志和当前场景的危险程度等信息占的比例较大。对比可知,两组驾驶人均认为当前场景的危险程度信息很重要。监控任务组中,驾驶人更注重车辆周围情况等驾驶任务相关信息;第二任务中驾驶人认为道路信息(交通标志等)更重要。
由表3 可知,监控任务组中,周围车辆的行驶速度以及当前行驶速度制动距离等信息占的比例很大;而第二任务组中,当前行驶速度制动距离以及辅助系统的状态等信息占的比例很大。对比可知,两组驾驶人均需要当前行驶速度制动距离信息辅助其决策。监控任务组中,驾驶人实时关注驾驶任务,对于周围路况关注度较高;而第二任务组中,驾驶人的注意力都集中在第二任务上,对驾驶任务的关注度相对较低,所以对辅助系统的能力信息关注较高。
2.2 问卷结果分析与讨论
将参试者对每个场景中每项参数的评分进行汇总整理,然后采用因子分析法对收集到的数据进行分析。
2.2.1 监控任务组
根据特征值大于1 的原则得到两个主因子(见表4),其中第1 主因子贡献率为41.97%,代表场景3~场景6 等紧急危险场景,称为紧急危险场景因子;第2 主因子贡献率为33.98%,代表场景1 和场景2 等拥堵复杂场景,称为拥堵复杂场景因子。以第1主因子为横坐标,第2 主因子为纵坐标绘制散点图,直观表示各个信息在两个主因子中的分布状况,主因子值越高表示该信息越重要(见图2)。第1主因子高的信息有当前车辆行驶速度、车辆盲点、仪表盘参数、发动机转速、后视镜情况、车头时距、两侧车道的车辆及人员状况、当前路段车辆及行人的行驶状况,由此发现在紧急危险场景中,驾驶人更关注自身车辆周围的情况;第2 主因子高的信息有当前路段行车道条数、当前道路的速度限制、当前路段的交通标志、与问题路段的距离、前方道路的行驶条件、与两侧车道车辆的距离、反光镜情况、车辆盲点,由此发现在拥堵复杂场景中,驾驶人更关注当前道路相关信息。

表2 环境信息Tab.2 Environment information

表3 系统信息Tab.3 System information
由于各主因子的方差贡献率不同,所以在评价信息时将主因子的方差贡献率作为权重,计算各信息在2 个主因子的得分与相应权重乘积的累计和作为该信息的综合得分,即

式中:S为综合得分;FAC1_1为各信息在主因子1的得分;FAC2_1为各信息在主因子2的得分。根据综合得分从高到低排序得出各信息的重要度排序结果(见表5)。
由表5 可知,综合得分较高的前几条信息为反光镜情况、后视镜情况、车辆当前行驶速度、当前场景的危险程度、周围车辆的行驶速度、当前行驶速度制动距离、与两侧车道车辆的距离等与当前驾驶任务紧密相关的信息。也就是说,驾驶人处在监控状态下实时都在关注驾驶任务,认为驾驶任务相关信息最为重要,而与系统相关的信息不是很重要。这与表1~表3 的统计结果以及图2 的散点图信息相一致。而文献[12]的研究结果与本研究不同,发现在部分自动驾驶等级下,除了与驾驶任务相关的信息之外,驾驶人更需要与自动驾驶系统相关的信息,因为驾驶人认为监控任务是一件很无聊的事情,容易注意力分散,所以当其注意力不集中时需要及时了解当前系统是否开启以及系统的剩余时间和处理问题的能力等信息,以便确定是否要接管车辆。
2.2.2 第二任务组
经过方差最大正交旋转得到3 个主因子(见表6),其中第1 主因子贡献率为43.6%,代表场景3~场景5等紧急危险场景,称为紧急危险场景因子;第2 主因子贡献率为24.55 %,代表场景1 和场景2 等拥堵复杂场景,称为拥堵复杂场景因子;第3 主因子贡献率为21.96%,代表场景6,称为紧急制动场景因子。以第1 主因子为横坐标,第2 主因子为纵坐标绘制散点图,直观表示各个信息在两个主因子中的分布状况,主因子值越高表示该信息越重要(见图3)。第1主因子高的信息有当前场景的危险程度、前方障碍物、车辆当前行驶速度、车辆盲点、两侧车道的车辆及人员情况、当前行驶速度制动距离、与两侧车道距离、辅助系统处理当前情况的能力;第2 主因子高的信息有当前道路的速度限制、当前路段的交通标志、反光镜情况、车辆当前行驶速度、车辆盲点、两侧有无变更车道、与前后车的车距、辅助系统处理当前情况的能力。在两个主因子得分都比较高的信息均是与当前驾驶任务密切相关的信息。此外,辅助系统处理当前状况的能力在两个主因子的得分都较高,说明无论是在紧急危险场景还是拥堵复杂场景中,当驾驶人执行第二任务注意力不在驾驶任务上时,都需要了解辅助系统是否能够处理当前状况。

表4 监控任务组旋转后的因子载荷矩阵Tab.4 Rotated component matrix of controlled tasks
由于各主因子的方差贡献率不同,所以在评价信息时将主因子的方差贡献率作为权重,计算各信息在3 个主因子的得分与相应权重乘积的累计和作为该信息的综合得分,即

式中:FAC3_1 为各信息在主因子3 的得分。根据综合得分从高到低排序得出各信息的重要度排序结果(见表7)。
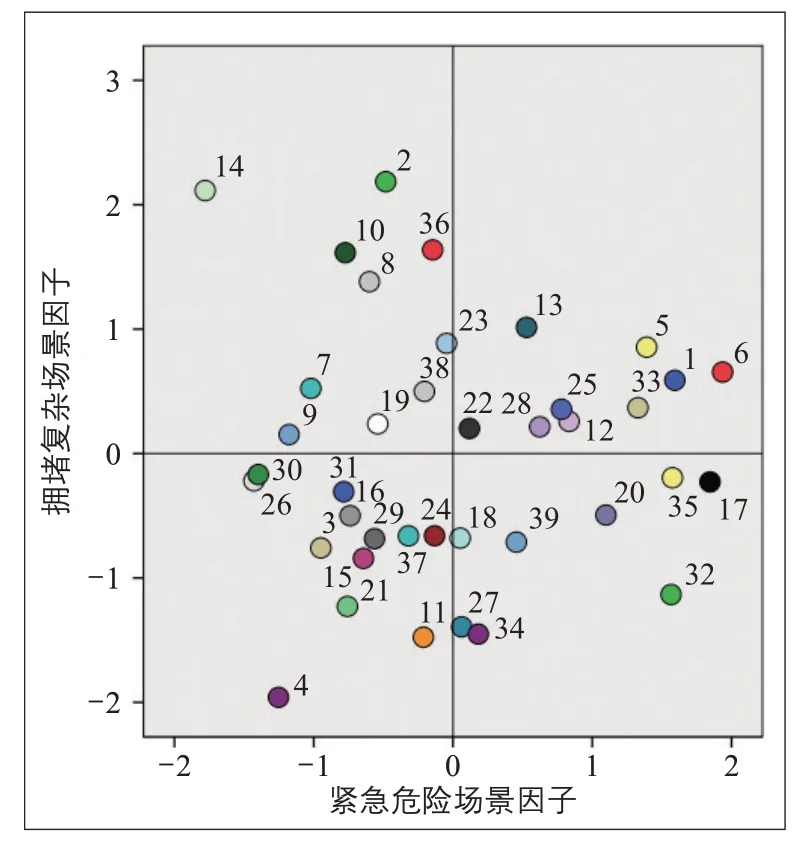
图2 监控任务组具体信息在两个主因子的二维排序Fig.2 Factor scores of detailed information of controlled tasks
由表7 可知,综合得分较高的前几条信息为车辆当前行驶速度、当前行驶速度制动距离、辅助系统的状态(是否开启)、当前场景的危险程度、辅助系统处理当前情况的能力、辅助系统对于当前状况提供的行驶方案、当前路段的交通标志等信息,即当驾驶人在执行第二任务时,其注意力不在驾驶任务上,对辅助系统相关信息的需求增多,而且对车辆周围驾驶状况以及道路信息的需求相对减少。文献[12]同样认为在自动驾驶状况下,相比驾驶任务相关信息而言系统相关信息(系统状况、计划行驶方案等)变得特别重要。这与表3 的统计结果一致,而与图3的因子得分情况存在一定差异。图3 中得分较高的信息基本上是驾驶任务相关信息,而主因子综合得分结果则侧重对辅助系统相关信息的需求。因此,在驾驶人执行第二任务时,除了应提供辅助系统相关信息之外,驾驶任务相关信息也很重要。
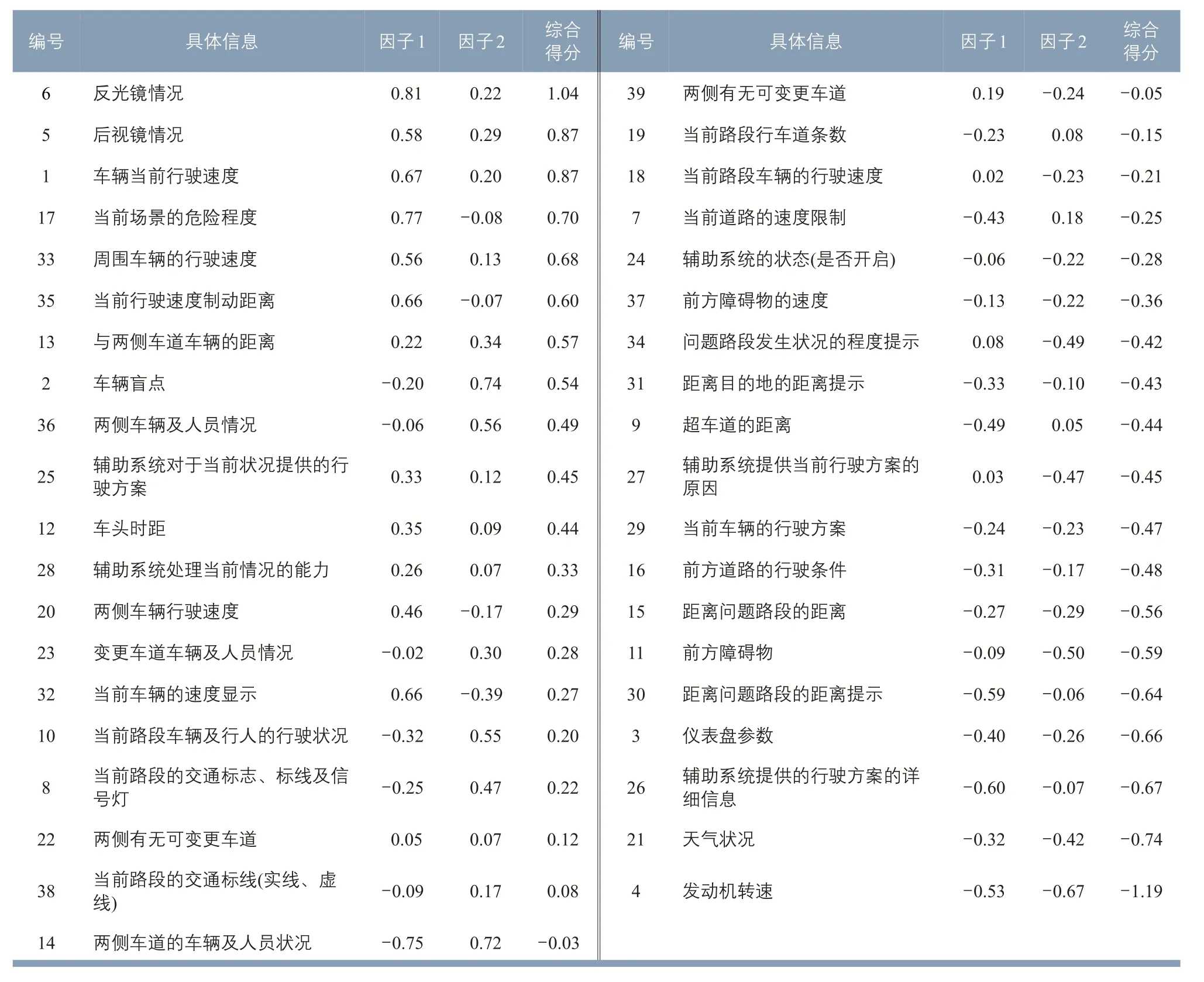
表5 监控任务组具体信息的主因子综合得分Tab.5 Comprehensive factor score of detailed information of controlled tasks
综合分析表5 和表7 的数据,发现监控任务组与第二任务组所需信息部分相同,包括车辆当前行驶速度、反光镜情况、当前场景的危险程度、两侧车辆及人员情况和辅助系统处理当前情况的能力。所以无论是在紧急状况下还是行驶缓慢的拥堵状况下,无论驾驶人的注意力是否在驾驶任务上,都需要将这些信息呈现给驾驶人。
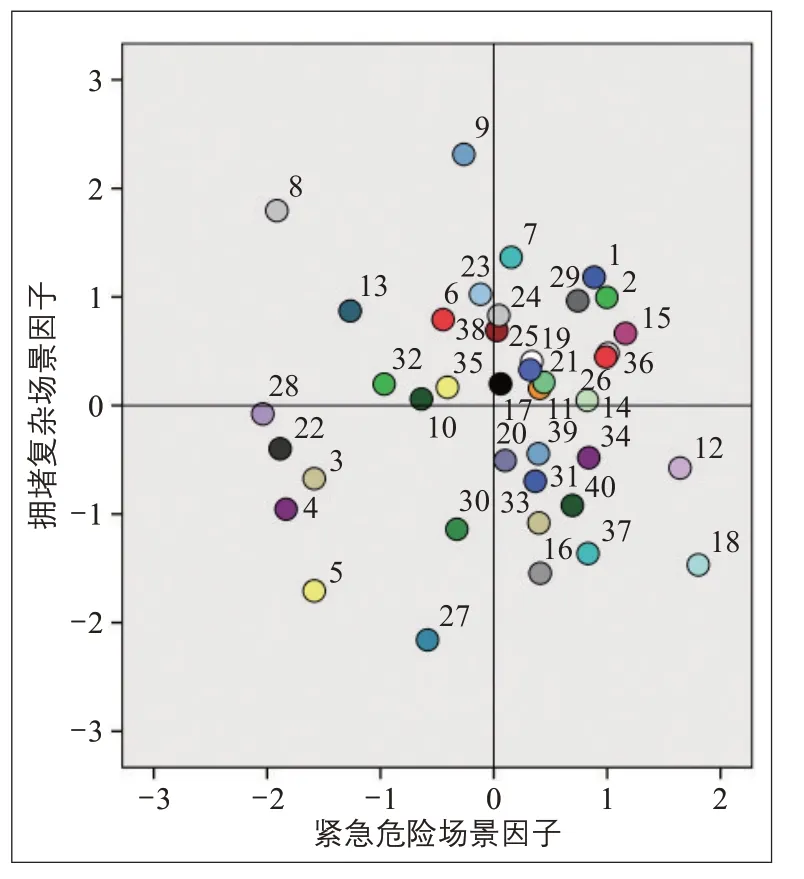
图3 第二任务组具体信息在两个主因子的二维排序Fig.3 Factor scores of detailed information of secondary tasks
2.3 眼动结果分析与讨论
使用眼动仪的目的是记录驾驶人在实验过程中的凝视行为,用于分析驾驶人在监控驾驶任务和第二任务上的注意力分配情况。因此,实验中定义2 个兴趣区(Areas of Interest, AOI),分别为:1)监控驾驶任务AOI,驾驶人通过挡风玻璃观察当前场景,此时捕捉到的区域为驾驶任务AOI;2)第二任务AOI,由于驾驶人会进行聊天、编辑文档、看电影三种第二任务,因此一旦捕捉到的区域为编辑文档画面、看电影画面或与实验人员对视的画面等一系列与驾驶任务无关的画面,则这些画面都将被定义为第二任务AOI。
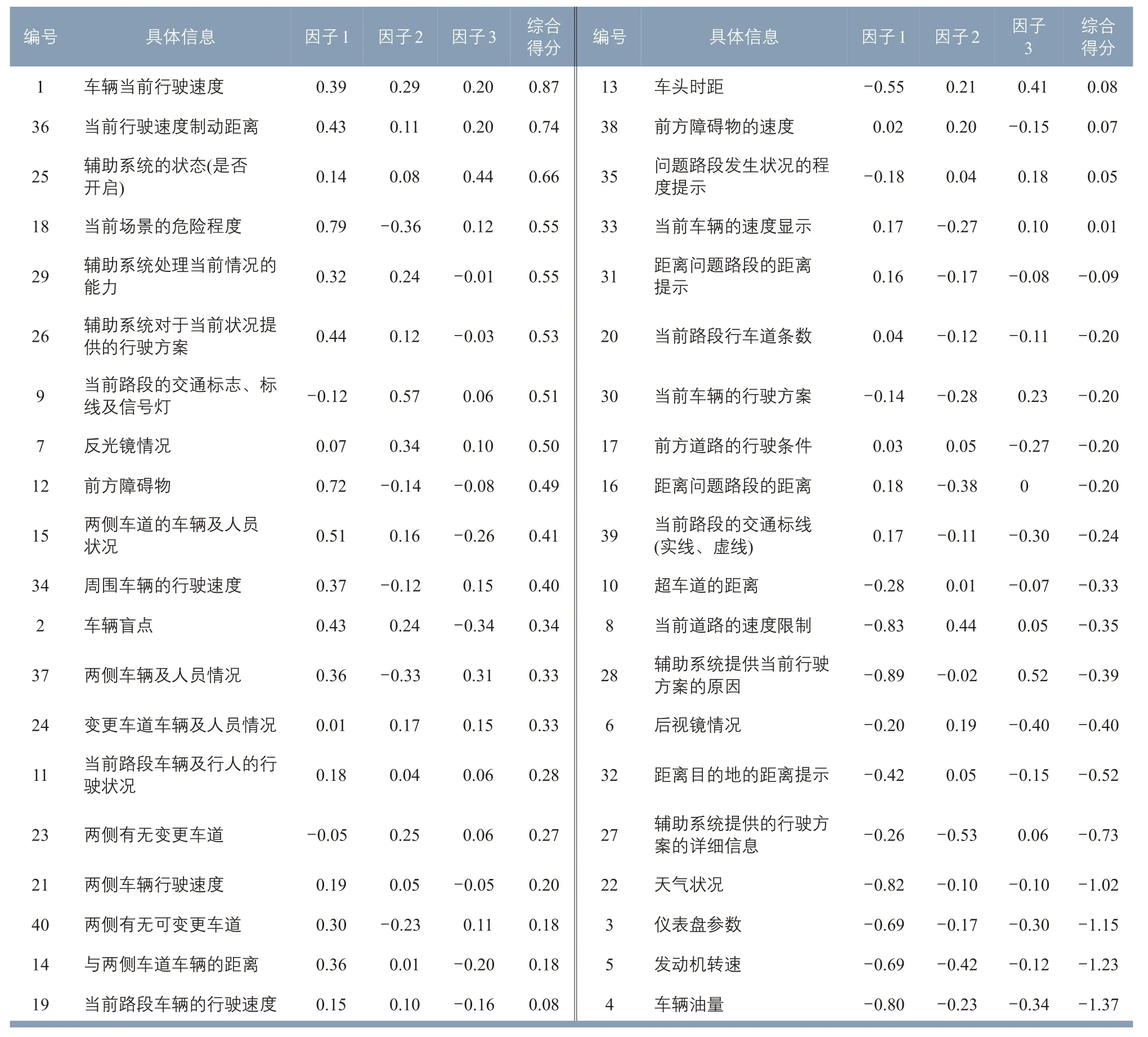
表7 第二任务组具体信息的主因子综合得分Tab.7 Comprehensive factor scores of detailed information of secondary tasks
由表8 可知,监控驾驶状态下驾驶人99.85%的注视时间都在监控驾驶任务上,还有0.15%的注意力放在了非监控驾驶任务上,这是因为驾驶人被要求监管车辆驾驶任务。但由于监管任务比较枯燥以及人们对于自动驾驶系统的过度信任会使得驾驶人的警觉性降低[18-19],从而分心并做一些与监管驾驶任务无关的事情,所以存在0.15%的注视时间不在监管驾驶任务上。
而第二任务组中,驾驶人91.38%的注视时间放在第二任务上,仅有8.62%的注视时间放在监控驾驶任务上。在该状态下,自动驾驶系统能够完全负责整个车辆的控制,驾驶人只需在系统提示需要帮助的时候接管车辆即可,所以当要求驾驶人做第二任务时,其大部分注意力都会放在第二任务上。然而驾驶人对于自动驾驶系统的信任程度也会影响其注意力的分配,在进行第二任务的时候,驾驶人偶尔会抬头查看当前场景,观察路面发生的情况,因此仍有8.62%的注视时间在监控驾驶任务上。一般情况下,越信任自动化,就会更多地参与到第二任务中,然后导致监控驾驶任务的注视点较少[12]。这些研究结果与已知的人—自动化交互信任的重要性一致[18]。
由表9 可知,第二任务组中,由于聊天只需要听觉不需要视觉的参与,而注视行为完全来自于视觉,所以在聊天状态下,驾驶人有90.28%的注视时间在监控驾驶任务上,仅有9.72%的注视时间不在监控驾驶任务上。而在编辑文档和看电影的任务中,由于眼睛需要盯着文档和电影屏幕,驾驶人有98.40%的注意力都放在第二任务上,仅有1.6%的注意力放在监控驾驶任务上。聊天状态下的注视时间仅有7 s,远远小于编辑文档和看电影状态下820.5 s的注视时间,由此发现,在驾驶车辆的过程中,编辑文档和看电影的第二任务会分散驾驶人的大部分注意力,而聊天的第二任务只会分散小部分注意力。
3 结语
本文探索在城市道路场景中自动驾驶车辆驾驶人的信息需求,即驾驶人与自动驾驶系统交接过程中所需的信息内容。得到主要结论如下:1)在紧急危险场景中,驾驶人更需要周围车辆行驶速度、与两侧车辆的距离、车头时距等信息,以便及时采取换道、制动等措施;2)在行驶缓慢的拥堵场景中,驾驶人更需要当前道路的相关信息(如交通标志、车道条数等)。研究还发现,无论驾驶人的注意力是否集中在监控驾驶任务上,以下一些重要信息都应该提供给驾驶人:1)车辆自身相关信息(如当前行驶速度、制动距离等);2)车辆周围状况(如两侧车辆及行人状况);3)当前场景的危险程度;4)辅助系统处理当前场景的能力。
当驾驶人处在监控驾驶状态时,会注意更多与驾驶相关的信息。而对于有第二任务的驾驶人,他们会将更多的注意力放到第二任务上,并且第二任务越复杂,驾驶人越沉浸在处理第二任务当中,对于监控驾驶任务的关注越少。在进行问卷调查时,有些驾驶人由于沉浸于第二任务,完全没有注意到刚刚的场景发生了什么。这也意味着第二任务的干扰会降低驾驶人的警觉性。所以,当驾驶人处在自动驾驶中的时候,需要以下信息辅助决策:1)车辆行驶速度、制动距离等车辆自身参数信息;2)周围路况、车况等环境信息;3)辅助系统处理当前场景的能力等辅助系统相关信息。
本研究仍有许多不足之处,例如第二任务的研究数据较少,实验变量信息可能不全面,命名也缺乏科学性。下一步的研究是如何采用抬头显示器的方式将这些必要信息呈现给驾驶人而又不会对其注意力造成干扰。
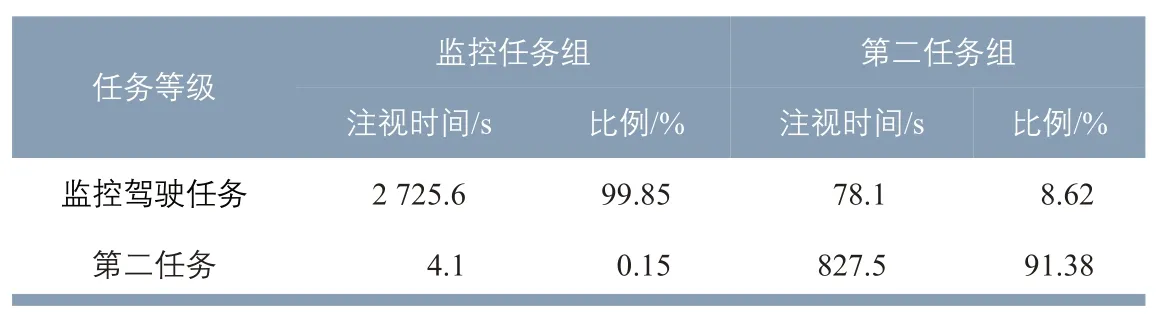
表8 眼动仪数据Tab.8 Eye tracker data

表9 第二任务组的注视时间Tab.9 Fixation time of secondary tasks
猜你喜欢
小雪花·成长指南(2022年1期)2022-04-09 18:39:41
疯狂英语·新读写(2021年10期)2021-12-07 02:41:30
学生天地(2020年5期)2020-08-25 09:09:08
新世纪智能(英语备考)(2019年4期)2019-06-26 00:49:04
铁道通信信号(2019年11期)2019-05-21 03:06:06
电子测试(2018年10期)2018-06-26 05:53:36
中国公共安全(2017年8期)2017-10-13 08:12:17
传媒评论(2017年3期)2017-06-13 09:18:10
第二课堂(课外活动版)(2016年2期)2016-10-21 16:58:54
汽车博览(2016年9期)2016-10-18 13:05:41