
数字摄影测量结合GPS进行矿山塌陷坑监测
2019-06-20 08:40:14庄景遗
商品与质量 2019年44期
庄景遗
核工业二八0研究所 四川广汉 618300
地表沉陷的传统监测方法不够完善,监测劳动强度大、无法进行实时监测等,同时由于塌陷坑危险度高,无法直接对其进行测量。因此,为了能够及时测量地表沉陷地质状况,我们提出了数字摄影测量技术和GPS技术的结合,对地面塌陷部位进行实时定位测量,这种测量方法对深度大、范围广的矿山塌陷坑的监测其中重要的作用,有利于预防塌陷坑的持续扩大,降低其对周边居民的影响,同时也能够提高监测效率,为预防工作提供了一定的保障。
1 数字摄影测量与GPS技术概述
1.1 数字摄影测量技术概述
数字摄影测量技术使利用摄影技术而实现自动化监测,本文所使用的数字测量技术主要为近景摄影测量技术,其是通过数码相机对矿山塌陷坑进行摄影拍照[1]。之后由数字摄影测量将图片加工成为数字摄影,形成数字化图像,最后通过传感器将获取到的数字图像传入到计算机中,形成数字地面模型以及正摄影图像。该模型图像包含了相对定向、方位参数解算、自动绘制等内容。
1.2GPS-RTK技术概述
GPS是通过卫星实时定位来建立监测网络,RTK作为GPS技术的新发展,其能够完成实时动态的监测。GPS-RTK技术同时具备两种技术功能,能够实现短时间内的精准测量,在测量的时候,其通过基准站和流动站的联通架设接受位置信息,同一时间内的不同站的接收机能够在接收到同一GPS所发射的信息,进而进行信息的处理工作[2]。基准站则会对信息计算,得到其差分更改数值,之后通过网络将数值传输到流动站中,而流动站在信息处理上也是同样的步骤,如图1所示,彼此不断的是数据差分缩小,精确测量数据,明确位置,实现精准的定位。
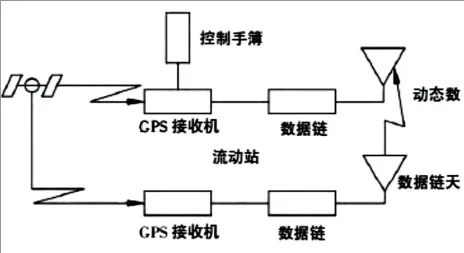
图1 GPS-RTK技术工作原理
2 数字摄影测量与GPS技术结合的应用
2.1 应用案例
四川西南部某矿业企业在我国东南部某矿山实行了持续多年的矿山开采作业,多年的开采使得该矿区的矿山出现了大面积的塌陷现象,地表形成了两处影响较大的塌陷坑,两处塌陷坑均呈现漏斗形状,深度都超过了100米,对周边的居民生产生活造成了严重的影响,若是继续进行开采会导致塌陷坑不断扩大。对此,为了降低塌陷坑的安全隐患,企业采用了新型的数字摄影测量技术对矿山塌陷坑进行实时监测,以便进行控制和预防工作。
2.2 技术应用
数字近景测量技术在对矿区塌陷坑进行监测的时候,首先需要进行定位工作,利用GPS定位相机位置,选好控制点,同时数字相机进行标定工作,进而架设好塌陷部位的数字立体网络,进而由图像匹配方案做好同名点的匹配,其次使用线性变换算法和所匹配的同名点计算出区域离散点坐标,之后建立区域数字模型,最后利用地形数字等高线进行分析对比,进而计算出塌陷区的深度、体积、范围等参数数据[3]。
2.2.1 控制点选取和相机标定
控制点的选取要遵循易于设备安装和信息接收、视野开阔位置,目标周边不要有障碍物,远离电力设施,周边不可有大范围水体。根据已有的矿山控制点,通过GPS测量技术确定测量的三维立体坐标为,如图2所示。在实际作业中,主要是在其中两个原有控制点和后确定的控制点上分别设置接受设备,同步通过10-11颗观测卫星进行监测,每次观测时间为45分钟。
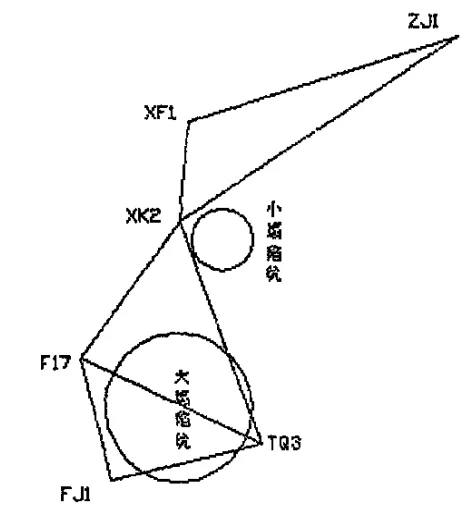
图2 GPS测量点布局
在进行相机标定的时候,利用二维DLT的表述坐标

其中L为变换参数,XY为网格坐标点,Z为坐标原点,xy为对应的像坐标,如图3所示。在网格中,X、Y周是在网格内部的,其矩阵方程表达形式为

2.2.2 影像匹配
本文使用水平像片的核线影像进行影像匹配。匹配的时候首先在低频子图像中选取特征进行匹配,之后通过核线影像制作来缩小搜索范围,同时通过分层匹配缩小左右视差,实现左右范围的控制,提高匹配率。但是受到噪声、阴影等因素的影响使得其与相关数的最大值对应点有可能不是实际的对应像点,彼此之间存在差距,导致匹配出现误差,为了降低匹配误差。本文通过双向匹配方法确定匹配点,也就是在成功匹配只有再进行反向的匹配,确定匹配结果无误差,若是存在不能够成功匹配的点就要在右片上重新选点,以此做基准点,之后再左片上选择同名的点后进行匹配,成功匹配后在进行反向匹配,若是还不成功则此点就被称为可疑点[5]。基于此,该区域测量的影像分为左右两片区,左片子影响块为510个,右片为105个,得到核线影像匹配点正确的有1300个,双向匹配率的成功率达到了77.8%。
2.2.3 图像采集
要了解矿山塌陷坑的立体状态,需要获取其数字高程模型,对其地形地面进行数字化模拟,为了建立该模型,需要对坑内及其周边的离散点进行采集,建立三维立体坐标,这就需要进行地形地面模型数据采集及数据信息的获取,被测量的坐标点就是参考点[6]。在本次测量中,首先在塌陷坑周边选择了7个控点,其是利用全站仪和三维坐标共同得到的,之后对塌陷坑的整体形态进行了拍摄,得到了它的整体数字图形。
2.2.4 观测站的设计及应用
离散点的采集需要观测站作为辅助,在使用GPS-RTK技术进行观测站设计的时候需要保证观测线位于地形主断面,选择站区时考虑矿区的其他开采作业不能够受到干扰,观测线长度也要大于地表矿坑的移动范围,测点密度上要根据矿坑深度设定,保证观测站控制点在矿坑移动范围外,且要深埋进土,保证控制点的稳定。基于此,本文利用GPS-RTK电子水准仪进行了矿坑地形的勘察,进而设置里观测站,观测线的控制点有3个,每个距离为100米,塌陷坑周边的观测点每个间距在20米,共设置34个观测点。同时为了更清晰的得到塌陷坑的实际状况,在公路一边也设置了观测点,大约为21个,间距为20米。
2.2.5 离散点坐标的获取
本文通过RTK动态测量技术对离散点的坐标进行了测量,其是在 1FJ 控制点上建立了观测站中的基准站点,进而在矿山的塌陷坑周边位置实行了RTK动态测量,测量选择的离散点总共有140个,通过实际的测量工作得到,在进行动态定位测量过程的时候,GPS-RTK测量技术观测站中的流动站在经过两分钟的观测后,进行了实时的定位工作,每次观测站所观测的数据只需要几秒钟就可以获得,这样使得测量活动更加的高效,同时也能够弥补数码相机在坡度和平缓地带测量不准的现象,使得对矿区塌陷坑的三维立体状态测量和描述能够更加的精准。
3 结语
综上所述,通过数字摄影测量方法防止了传统测量中出现的问题,提高了测量效率。首先,数字近景摄影测量技术作为非接触形式的测量技术,在塌陷区域、变形地形等区域的测量上十分适合,对三维可视化和精度测量很方便,以满足矿山塌陷区的精确测量要求。其次,狂三塌陷区的三维测量结果与实际情况相符,且能够同时得到不同时间点的影像信息,为全面研究的动态变形测量提供了相应的数据。同时,通过GPS、RTK技术处理三维坐标,所生成的数字模型对塌陷坑的监测、计算、预防等都有着积极作用。最后,受到影像遮蔽问题的营销,塌陷区的影视纹理、色调贫乏单一,本文进行的影像匹配算法尽管使匹配成功了,但是没有解决影像遮蔽现象,对此,我们需要进一步改进匹配算法,提高匹配的准确性。
猜你喜欢
舰船电子对抗(2022年6期)2022-12-25 12:41:40
科学导报(2022年39期)2022-07-04 23:15:46
河北地质(2021年2期)2021-08-21 02:43:50
神剑(2021年3期)2021-08-14 02:30:08
昆钢科技(2021年2期)2021-07-22 07:47:06
矿产勘查(2020年7期)2020-12-25 02:43:42
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
航空学报(2017年5期)2017-11-20 03:44:46
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
