
基于多源数据的试飞遥测天线自动引导技术研究
2019-06-19 02:33张国旺袁炳南李儒宽
现代电子技术 2019年11期
张国旺 袁炳南 李儒宽

摘 要: 为了进一步提升试飞遥测接收天线对目标飞机的跟踪质量,提出基于PCM、二次雷达、北斗短报文三种互为冗余数据同时引导遥测天线的空、天、地数据链路引导模式。并在此基础上设计动态数据最佳数据源选择算法,确保每一时刻只有一个较为理想的数据引导遥测接收天线。地面试验证明,此研究对于进一步提升试飞遥测天线引导质量,保障试飞安全具有重要意义。
关键词: 遥测天线; 天线引导; 目标飞机跟踪; 试飞; 多源数据融合; 数据源选择
中图分类号: TN821?34 文献标识码: A 文章编号: 1004?373X(2019)11?0019?05
Abstract: In order to improve the target aircraft tracking quality of telemetry receiving antenna for trial flight, the air?space?ground data link guidance mode to guide telemetry antenna is put forward, which is based on the three mutually redundant data (PCM data, secondary radar data and BeiDou short?message data). On this basis, the optimal data source selection algorithm of dynamic data was designed to ensure that there is only one ideal data to guide the telemetry receiving antenna in every moment. The ground test results prove this research has a great significance to further improve the guidance quality of the trial flight telemetry receiving antenna, and ensure the safety of the trial flight.
Keywords: telemetry antenna; antenna guidance; target aircraft tracking; trial flight; multisource data fusion; data source selection
0 引 言
飛行试验实时监控技术一直是国内、外飞行试验领域研究的关键技术之一,不仅对于飞行试验探索边界、挑战极限、确保试飞安全有重要意义,而且通过飞行数据的实时处理,可迅速判断飞行试验的结果,缩短飞行试验周期,提高试飞效率。实时监控技术以试飞遥测数据为基础,关键在于试飞遥测数据的连续性、可靠性、实时性,取决于试飞遥测接收天线对目标飞机的跟踪质量。
传统的遥测跟踪多采用人工手动方式,且依赖于机载测试系统将定位数据遥测下传到地面相关跟踪设备,如遥测天线、光电经纬仪等。其主要存在精准度较低、易出错、效率低且人工代价高等问题。随着无人机试飞,机上不携带传统的遥测传输系统,只能依靠卫星导航定位系统完成对目标的跟踪[1]。
随着新一代战机信息化、自动化技术的全面提升,飞行试验遥测接收从“单目标、人工跟踪”逐步向“多目标、远程、自动跟踪”的方向发展,为了提升可靠性天线引导数据也逐步向多源化方向发展。针对此需求,本文提出基于PCM、二次雷达、北斗短报文的多数据源试飞遥测天线自动引导技术,将三种互为冗余的数据按照一定的算法进行择优选取,进一步提升试飞遥测天线的跟踪质量[2]。
1 试飞遥测天线跟踪原理分析
试飞遥测接收天线自动跟踪系统的主要作用是进一步提升遥测接收天线跟踪目标飞机的质量,在有限遥测距离内(约300 km)使目标飞机始终处于遥测接收天线的主瓣区域(理论上,旁瓣也能接收到信号,但是信号质量不如主瓣,数据可能不稳定),确保机载测试系统的其他数据(PCM、视频数据等)能够稳定可靠地实时遥测下传至地面遥测接收天线。因此,目标飞机的定位数据在整个系统中发挥着至关重要的作用,并且对定位数据的实时性也有一定的要求。如果数据的更新频率太低,则会造成目标飞机飞出遥测接收天线的主瓣区域,造成遥测下传的其他数据不稳定或中断等问题,严重影响地面实时监控的质量和效果,影响试飞科目尤其是风险科目的试飞动作质量及试飞安全。因此,本文主要分析引导数据更新频率与目标距离及速度间的关系[3]。
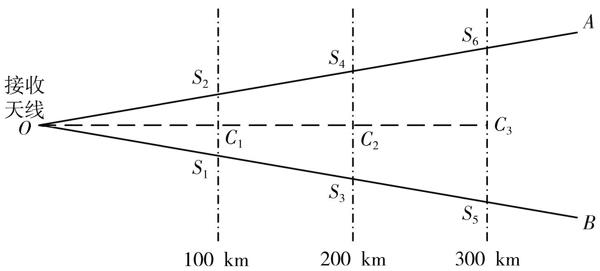
目前在飞行试验领域,用于PCM遥测接收的遥测天线主要分为全向天线和定向天线两种。全向天线增益小,跟踪距离较近(约200 km),定向天线增益较大,跟踪距离较远(约300 km)。目前试飞遥测中以使用定向天线为主,在此以试飞中应用的1.8 m抛物面定向天线为例,其主瓣角最大为3.8°,将飞机看作质点,计算飞机在距接收天线一定距离外,从天线主瓣中心点以几种不同的速度飞出主瓣区域所用的时间模型如图1所示。[∠AOB]表示整个主瓣扇面,[OC]表示某方向主瓣扇面中心线,在此假设理想状态下,飞机目标位于主瓣区域中心点且传输延迟及天线响应时间都忽略不计。
图1 接收天线主瓣与目标飞机距离及速度关系模型图
表1 目标飞机在不同距离和不同速度下飞
从表1可以看出,距离接收天线越近,目标飞机速度越快,则飞出天线主瓣区域所需时间越短。作为遥测天线引导数据,如果更新频率低于4次/s,在距离较近时(100 km以內),目标飞机速度超过800 km/h,目标飞机会飞出接收天线的主瓣区域。这也证明了本场附近飞机起降过程中遥测信号不稳定的原因,对此一般都采用自动跟踪结合人工修正的模式跟踪以确保遥测监控数据的质量。
2 系统结构设计
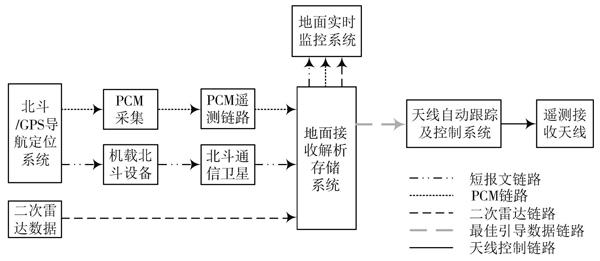
系统设计充分利用现有系统、设备及资源,突破传统使用方法,将北斗短报文、二次雷达等独立使用的系统数据引入本系统并综合应用,形成空、天、地三种不同传输链路的天线引导数据,系统组成框图如图2所示。
图2 系统组成框图
系统主要由三路数据(PCM、二次雷达、北斗短报文)、地面接收解析子系统、天线自动跟踪及控制子系统等组成。其中,PCM数据是通过接收北斗/GPS导航定位数据经过目标飞机机载采集器采集并经过PCM遥测链路下传至地面接收解析系统;北斗短报文数据是通过接收北斗导航定位数据经过北斗机载设备再经过北斗通信卫星转发至地面接收解析系统;二次雷达数据是直接引入地面接收解析系统进行解析。地面接收解析子系统主要实现对三种数据的接收和解析,以及数据的择优选择并转发至天线自动跟踪及控制子系统。天线自动跟踪及控制子系统主要实现对择优选择结果换算成天线控制的相关参数并发送天线控制指令给遥测接收天线等功能[4]。
3 关键技术
3.1 北斗短报文数据解析
采用将北斗1和北斗2芯片集成在一起,同时支持定位和发送位置信息功能的成熟北斗产品。需要在机上、地面分别安装北斗天线和设备,用于接收北斗卫星系统的定位信息以及将自身位置信息以短报文方式通过卫星发送到地面[5]。需要在地面接收解析软件中实现对北斗短报文信息的解析功能。地面北斗接收模块通过串口与地面接收解析计算机连接,以标准的串口通信方式与解析计算机通信,通信采用标准的串口通信。数据解析协议 (不同产品可能略有不同)如图3所示。
图3 北斗短报文数据解析协议
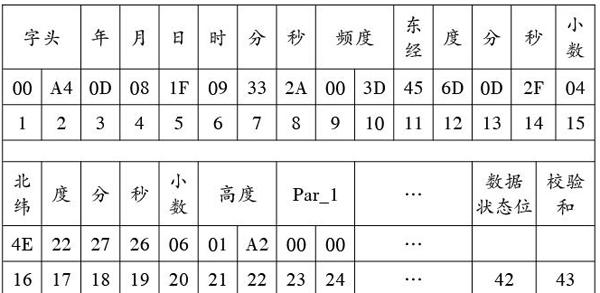
根据通信协议及数据解析协议即可解析出遥测天线引导所需目标飞机的经纬度位置信息[6]。作为试验验证,采用的北斗芯片报文发送频率为2次/min;作为实际引导应用,报文更新频率应至少选择4次/min以上。
3.2 二次雷达数据解析
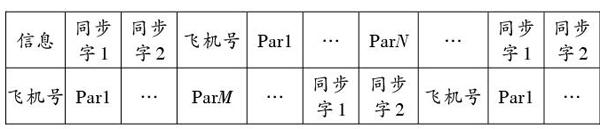
二次雷达又称为航空交通管制雷达信标系统,二次雷达采用应答方式,其回波中包含目标飞机的距离及位置信息、气压高度信息等可用于军民用飞机目标识别、实时跟踪询问目标等。但二次雷达数据信息量较大,数据处理较为复杂。二次雷达数据通过RS 232串口通信方式传输到数据解析计算机,其通信采用标准的串口通信。因二次雷达数据具有包含多个飞机位置信息、信息长度不固定、干扰信息较多等特点,其数据解析协议主要利用同步字找到有效数据的开始,根据飞机号判断是否是所需飞机的数据,再根据具体的数据位置解析出所需要的位置信息[7]。其数据解析协议如图4所示。
图4 二次雷达数据解析协议
利用GetPortOpen函数对串口资源使用情况进行检测,使端口资源处于释放状态。用SetInBufferSize函数设置接收缓存的大小(以字节为单位),应大于实际通信中最大一帧数据的长度,以防止数据溢出。由于数据中含有不可见字符,所以数据检取应采用二进制方式,即SetInputMode(1)。针对二次雷达数据的特点,SetRThreshold(1)表示当接收缓存区有1个及以上字符时将触发接收事件,以提高数据处理的实时性。最后,用SetPortOpen(TRUE)函数打开端口,完成串口的设置。值得注意的是,在通信之前常常需要调用SetInputLen(0)函数,它将引起MSComm读取整个接收缓存区,以清空缓存中初始的随机内容。数据发送频率为4次/s。
3.3 多源数据优选算法设计
该技术的关键在于对解析出来的三种数据源进行择优选择,选择算法的质量直接影响着遥测天线引导数据的质量。该算法是在地面解析软件中实现,直接对解析出来的三种数据按照算法流程进行选择,选择后的结果数据以网络方式发送给天线跟踪及控制子系统,换算为天线的俯仰、方位等量值即可通过天线伺服系统驱动天线从而实现自动跟踪的功能[8]。
设计基于动态计算的最佳数据源选择算法进行最优数据源选择。所谓动态计算是指算法基于实时数,动态地根据当前数据的特征进行计算、选择最佳的数据源作为天线自动引导的数据源。
经过前期实验验证,从实际应用出发,数据源选择算法的设计必须考虑到以下因素:
1) 数据源信号的发送频率。在数据源信号其他条件基本相同时,优先选择数据发送频率较高者。因为发送频率较高的数据源其目标位置精度较高。
2) 不同数据源数据的时间。多个数据源虽然都是同一个目标的位置数据,但因每个数据源系统之间不是建立在同一系统之上,也没有时间同步机制,并且经过网络传输、计算机处理后根本无法保证各数据具有时间相关性。为了防止有的数据源数据“迟到”造成数据过期现象,必须考虑数据源数据的时间,以确保数据源数据的实时性。以当前在用数据时间为准,离该数据时间最近的数据源数据优先选择。
3) 数据有效性判断。数据源的數据有时会因信号较弱或者异常而产生一些异常跳点数据,这些数据往往会对天线自动跟踪系统产生严重的误导作用。因此必须设计算法剔除跳点数据和异常数据。方法是利用每种数据源数据发送频率,通过对目标飞机速度及位置关系的计算,再结合当前引导数据值的历史数据(至少3个点)得出经纬度变化上限值[9]。将每个数据源的位置信息和此上限值对比,超过了就认为该数据是跳点直接舍弃。按照PCM数据16次/s,二次雷达数据4次/s,北斗短报文数据2次/min。
对以上三点因素按优先级进行排序,依次为数据有效性、数据时间、发送频率。据此可设计动态计算的最佳数据源选择算法数据结构体描述如下:
图5 基于动态计算的最佳数据源选择算法流程图
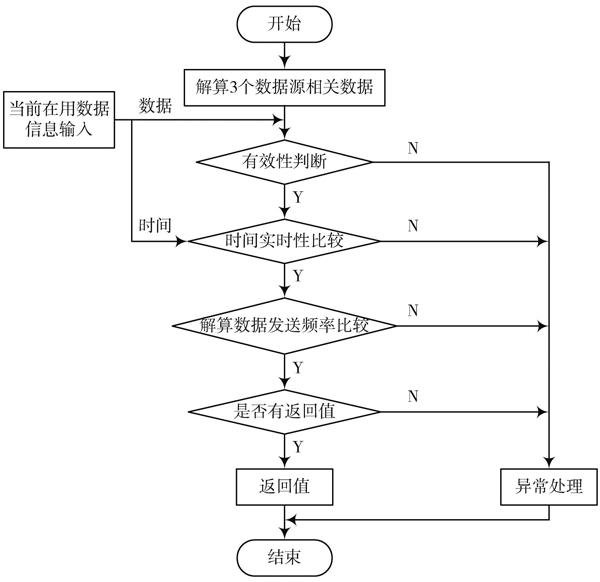
其中当前在用数据指当前时刻作为引导遥测天线的数据值,可在发送数组或变量中获取。异常处理包含的情况[10]及处理结果如下:
1) 有效性判断结果为无效,则该数据状态值被设置为0;
2) 数据时间比较结果不是最优数据,则该数据状态值被设置为0;
3) 发送频率比较结果不是最优数据,则该数据状态值被设置为0;
4) 经过多层选择后,最终没有最优数据或者数据都异常,则重复使用当前数据。
4 试验验证
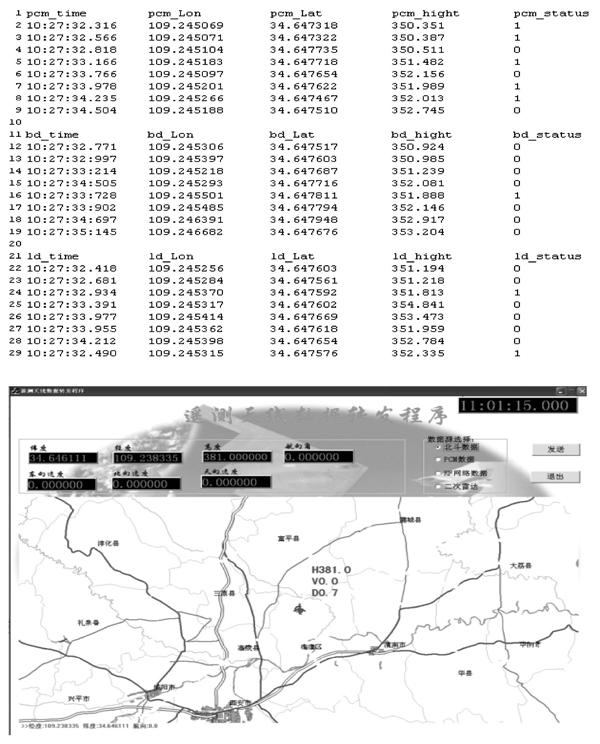
对整个系统和软件进行地面跑车验证试验,主要验证实时状态下多数据源择优选择算法的正确性以及在遥测传输距离、二次雷达探测距离边沿(约300 km),北斗短报文数据的引导效果。地面解析转发前记录的数据以及监控软件显示效果如图6所示。当前在用数据取决于选择算法判断的结果及数据在当前时刻的有效性状态值。
图6 地面试验数据及监控软件显示
5 结 论
试飞遥测天线自动引导技术是飞行试验实时监控技术的关键技术之一,引导数据的质量直接影响实时监控数据的质量和试飞安全,采用多源冗余数据作为引导数据无疑可进一步提升遥测天线引导的质量和可靠性。本文基于现有常用系统和数据,创造性地提出同时使用PCM、二次雷达、北斗短报文三种数据作为遥测天线引导数据源,形成空、天、地三种数据源引导的模式。设计了动态最佳数据源选择算法,确保每一时刻只有一个最理想的数据作为天线引导的数据源,为后续试飞领域目标引导、跟踪提供了良好的借鉴。此技术研究也可作为后续多目标跟踪、探测以及精确引导等技术的研究基础。
参考文献
[1] 李松.基于多源信息融合的定位与跟踪方法研究[D].郑州:河南大学,2014.
LI Song. Research on the method of locating and tracking based on multi?source information fusion technology [D]. Zhengzhou: Henan University, 2014.
[2] 王新涛.多源信息融合方法研究[D].哈尔滨:哈尔滨工程大学,2012.
WANG Xintao. The research of multi?source information fusion method [D]. Harbin: Harbin Engineering University, 2012.
[3] 汤辉,叶超.天线引导数据对伺服跟踪的影响分析[J].自动化技术与应用,2011(12):31?32.
TANG Hui, YE Chao. Analysis of effect of antenna guiding data on servo system′s tracking [J]. Techniques of automation & applications, 2011(12): 31?32.
[4] 黄璇.多源引导信息融合及其关键技术研究[D].长春:长春光学精密机械与物理研究所,2016.
HUANG Xuan. Research on key technologies of multi?source guiding information fusion [D]. Changchun: Changchun Institute of Optics, Fine Mehcanics and Physics, Chinese Academy of Sciences, 2016.
[5] 张国旺,袁炳南,房瑾,等.北斗定位系统在飞行试验中的应用研究[J].计算机测量与控制,2015(5):1734?1735.
ZHANG Guowang, YUAN Bingnan, FANG Jin, et al. BeiDou position system application for flight test [J]. Computer measurement & control, 2015(5): 1734?1735.
[6] 中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件:公开服务信号(2.1版)[S].北京:中国卫星导航系统管理办公室,2016.
Management Office of Chinese Navigation Satellite System. Public service signal for space signal interface control file of BeiDou Navigation Satellite System (Ver 2.1) [S]. Beijing: Ma?nagement Office of Chinese Navigation Satellite System, 2016.
[7] 胡建.二次雷达探测仿真软件设计与实现[D].成都:西南交通大学,2017.
HU Jian. Design and implementation of simulation software for secondary surveillance radar detection [D]. Chengdu: Southwest Jiaotong University, 2017.
[8] 庞岳峰,吴小东,牛攀峰.测控设备引导跟踪数据插值方法[J].电子科技,2016(11):118?121.
PANG Yuefeng, WU Xiaodong, NIU Panfeng. Measurement and control equipment tracking data interpolation method [J]. Electronic science and technology, 2016(11): 118?121.
[9] 张小龙.无人机数字引导跟踪误差补偿技术设计与实现[D].西安:西安电子科技大学,2014.
ZHANG Xiaolong. Design and realization of correction technology in antenna digital guidance tracking of UAV [D]. Xian: Xidian University, 2014.
[10] 林愛军.基于粒子滤波的空天飞行器多源信息融合导航技术研究[D].南京:南京航空航天大学,2016.
LIN Aijun. Study on the aerospace vehicle multi?source information fusion navigation technology based on particle filter [D]. Nanjing: Najing University of Aeronautics and Astronautics, 2016.
