基于变电站汽吊作业安全距离告警系统研发
2019-06-15 01:08
四川电力技术 2019年2期
(国网宜宾供电公司,四川 宜宾 644000)
0 引 言
在变电站进行基础设施建设或部分间隔停电检修时,需要用到吊车等设备进行辅助工作。在吊车工作时,会有旁边间隔带电的情况发生。而吊车斗臂在旋转移动的过程中,按照《国家电网公司电力工作安全规程》[1]的相关规定,应保持一定的安全距离。在实际操作过程中,没有相应的测量措施,只能依靠现场指挥人员目测安全距离来提醒吊车司机,这样会造成与带电设备及母线的距离小于安全距离的情况,最后导致安全生产事故的发生。
为了避免吊车斗臂转动过程中误碰带电设备,减少安全事故发生,所以决定研制吊车作业距离带电设备自动检测报警系统。
1 模型及原理
吊车作业安全告警系统检测3D模型如图1所示。假定图1中围栏内为待检修设备,围栏以外为带电设备,吊车斗臂作业范围必须在围栏以内。作业过程中,吊车斗臂距离地面高度远远大于围栏0.8 m高度,那么吊车斗臂距离旁边带电设备距离唯有依靠人眼经验判断,存在极大误差,难以准确把握。结合传感器检测技术,在作业范围内构件虚拟“口”型三维空间,即将围栏高度向上无限延伸。利用UWB定位模块实时采集斗臂与所设置边界点的距离并传送至仪器后台,利用海伦模型算出斗臂与虚拟墙壁的垂直距离。当检测距离小于《国家电网公司安全工作规程》规定的安全距离时,进行告警提示。
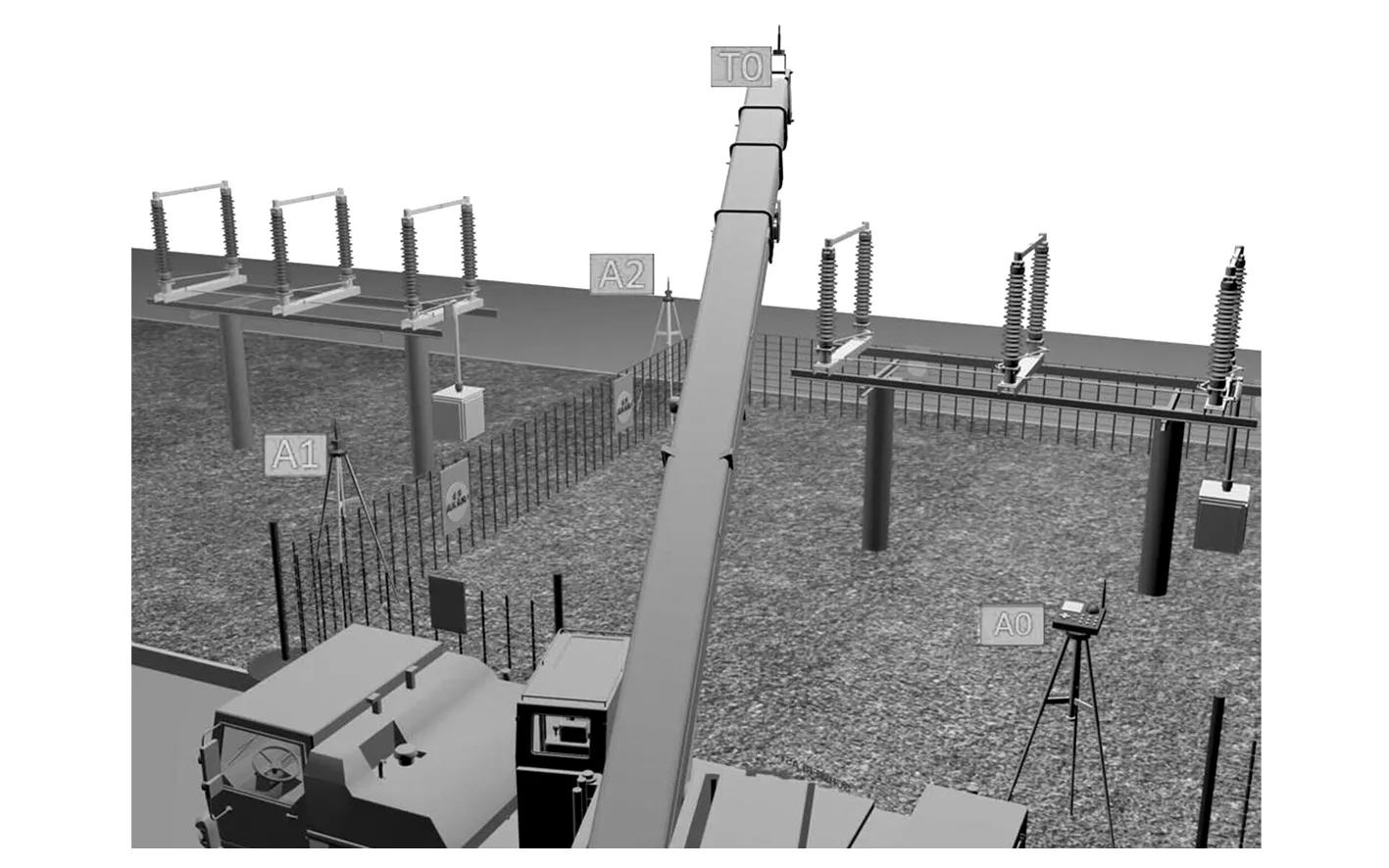
(a)3D示意
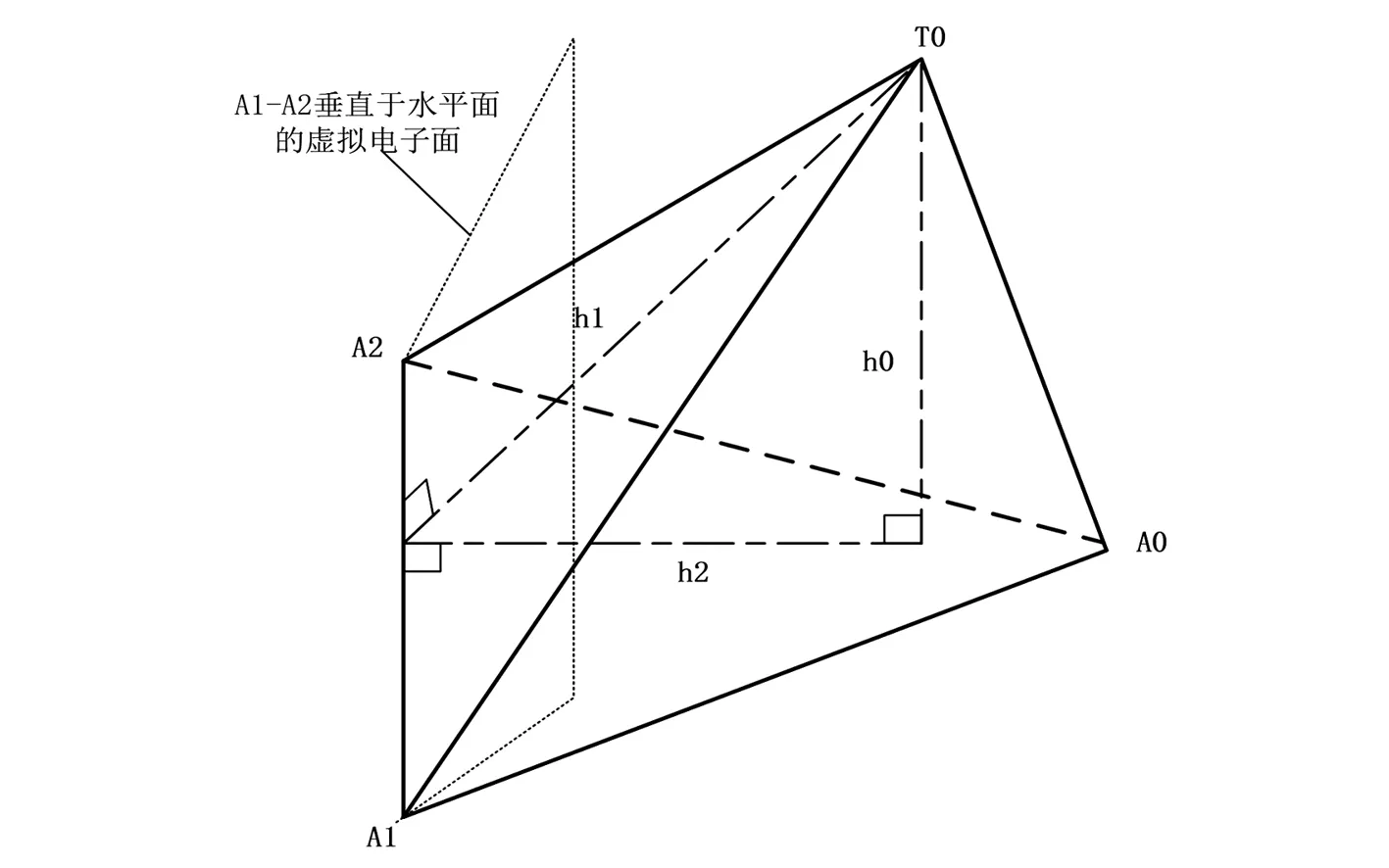
注:T0-A0 、T0-A1、T0-A2、A0-A1、A0-A2、A1-A2的距离通过测距模块测量,h2为最终需要计算出的吊车斗臂到带电区域(A1-A2构成的垂直于水平面的面)的空间垂直距离。(b)理论计算模型图1 吊车作业安全告警系统检测
理论计算模型中相关计算公式如下:
三棱锥T0-A0-A1-A2体积V为
式中:a为 T0-A0距离;b为 T0-A1距离;c为 T0-A2距离;I为A0-A1距离;m为A1-A2距离;n为A0-A2距离。
三角形A0-A1-A2面积S1为
三棱锥T0-A0-A1-A2以A0-A1-A2为底面的高h0为
三角形T0-A1-A2面积S2为
三角形T0-A1-A2高h1为
T0到A1-A2形成的垂直面的空间距离(最终吊车到带电区域的空间垂直距离)h2为
根据现场检测数值h2与《国家电网公司电力安全工作规程》吊车作业安全距离D进行判断,D值如表1所示:当h2大于D时,装置正常运行,告警装置不动作;当h2小于D时,告警装置动作,发出告警信号。
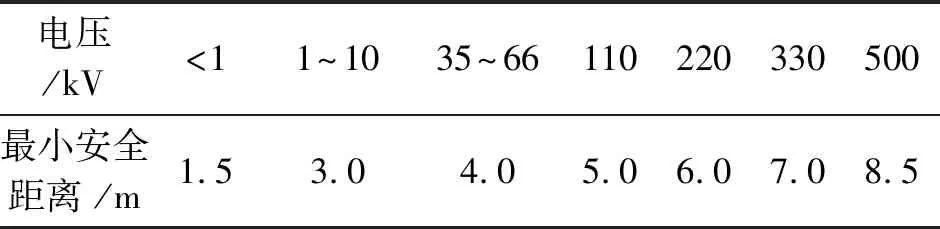
表1 吊车斗臂与带电体最小安全距离D
2 方案优选及装置研制
2.1 方案优选
根据现场实际需求,该装置的总体设计方案分为3部分,即距离测试(步骤1)、数据分析(步骤2)和距离判断及告警(步骤3),如图2所示。其中距离测试基本原理如图1所示,但图中吊车斗臂定点t0空间位置随机运动,因此,该装置研发的重点难度为(步骤1)。根据传感器技术应用情况,提出了两套不同的解决方案:方案1是采用超声波[2]进行距离的测量;方案2是采用UWB[3]方案进行距离测量。两种方案对比如表2所示。
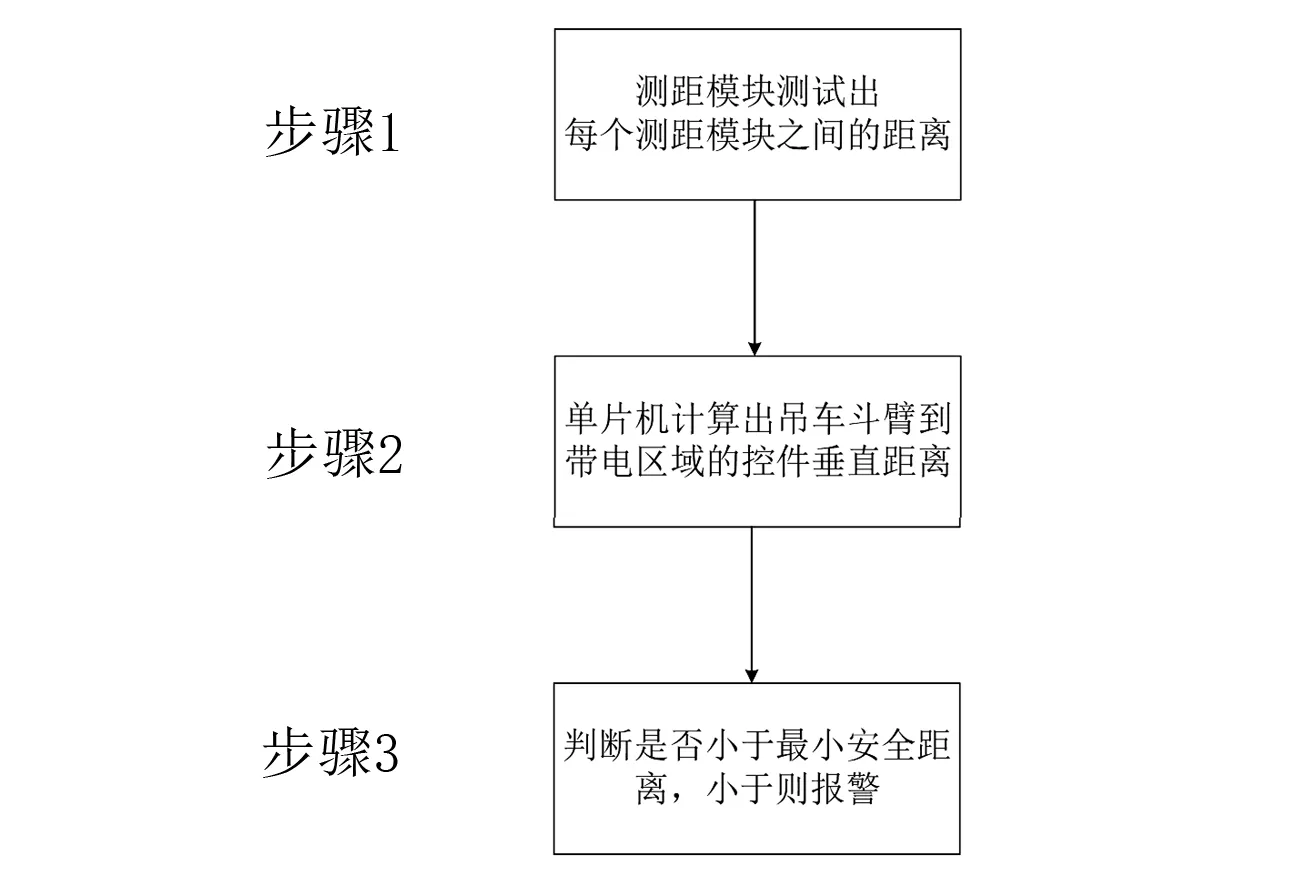
图2 总体方案流程
综合测量角度和最大测量距离分析,最终采用UWB方案进行距离测量。
2.2 装置研制
根据系统的要求以及需要实现的功能,将装置分为三大板块:传感器板块、单片机板块以及报警器板块,如图3所示,硬件结构如图4所示。

表2 方案对比分析
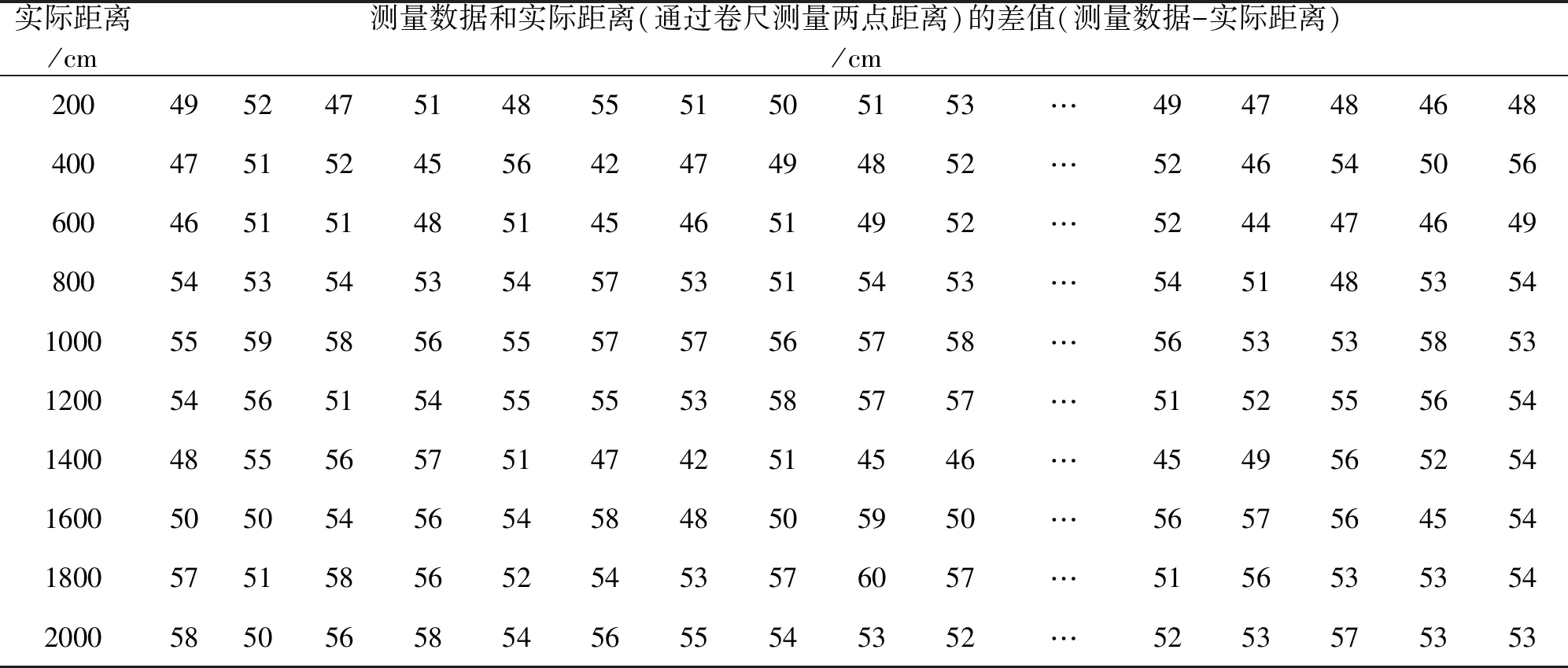
表3 测量数据和实际数据对比
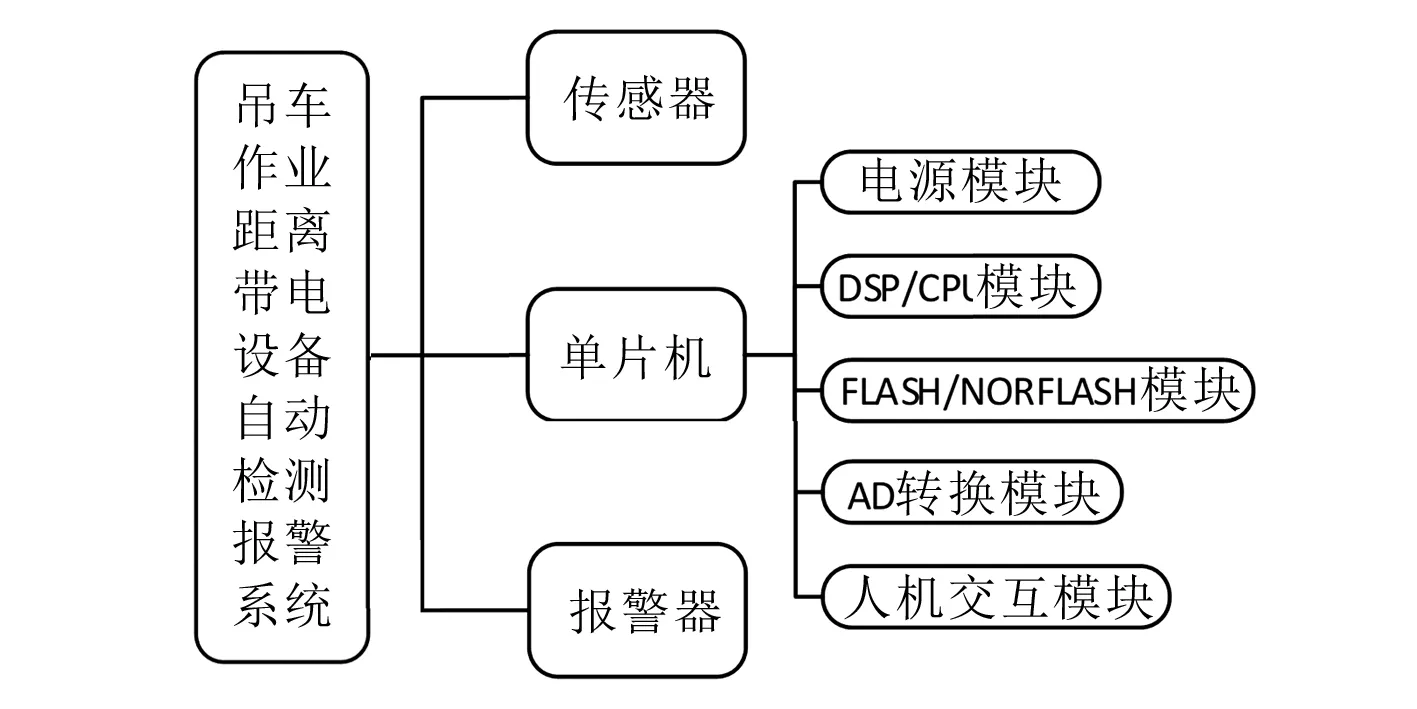
图3 汽吊作业安全距离告警系统装置
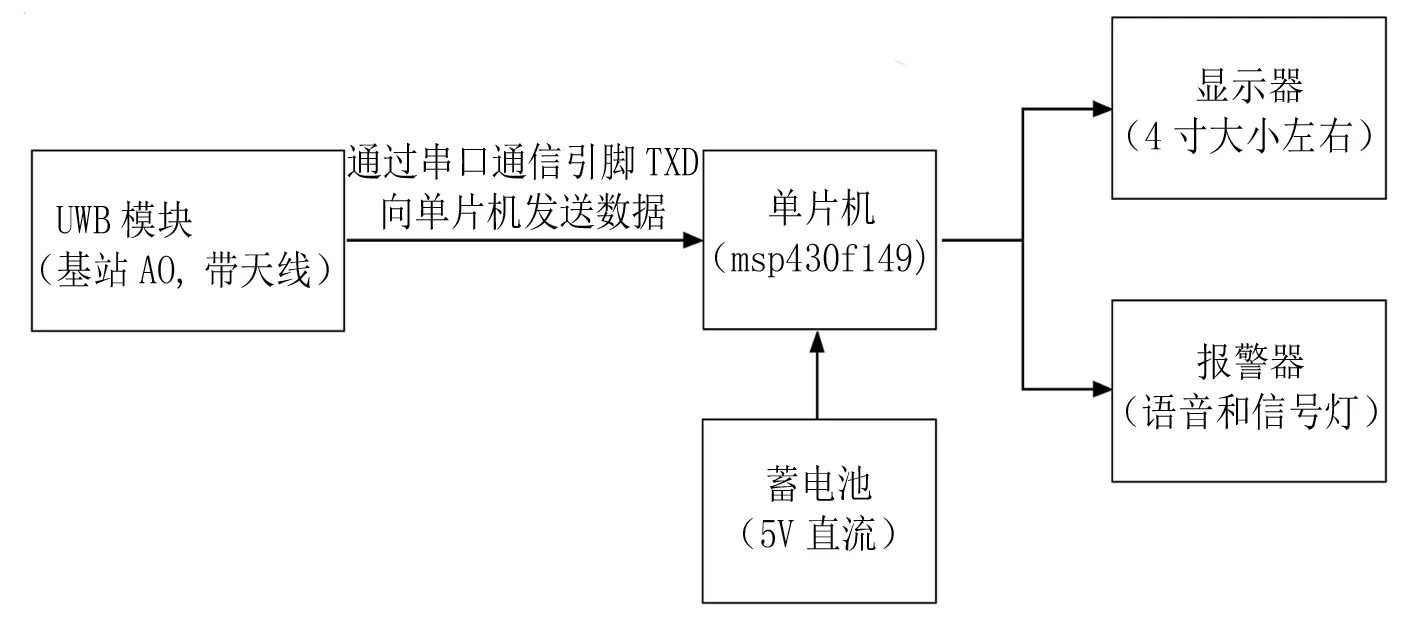
图4 硬件结构
报警器板块由单片机模块、UWB传感器和警示装置组成,对超过安全距离的情况进行报警。
单片机模块,是整个装置的神经中枢,用以处理数据,设计相应算法完成距离检测,并控制报警器。UWB传感器板块主要负责距离测量的发射与接收,其测距的原理为s=vt,式中:s为发送端和接收端之间的距离(每个模块既可以做发送端也可以作为接收端);v为光速;t为传输的时间,通过获取发送端和接收端的时间差即可计算出距离。由于UWB采用电磁波的传输模式,其理论上没有传输角度上的限制,且市面上现有的测量距离模块可高达到500 m,能够极大满足现场应用要求。警示装置,对超过安全距离的情况进行报警。
该装置于现场进行实际应用,其效果良好。
3 测试数据分析
由图1可知,整个装置最原始的测量数据是T0-A0 、T0-A1、T0-A2、A0-A1、A0-A2、A1-A2的距离,但实际距离和装置测量距离存在一定的误差,如表3所示。
从表3中数据可以看出,实际距离和装置测量距离似乎存在一定的线性关系,因此,通过最小二乘法[4]拟合出一个线性关系,如图5所示。拟合之后实验数据如表4所示。
通过算法拟合后的数据和实际距离的最大误差在±7 cm内,很大程度上降低了直线距离的测量误差。
为检测装置的最终效果,进行了现场检验,如图6所示。
现场实验数据如表5所示,装置报警的时候,报警器设定的安全距离和实际测量距离误差均小于±40 cm,满足最初设计要求和现场实际需求。
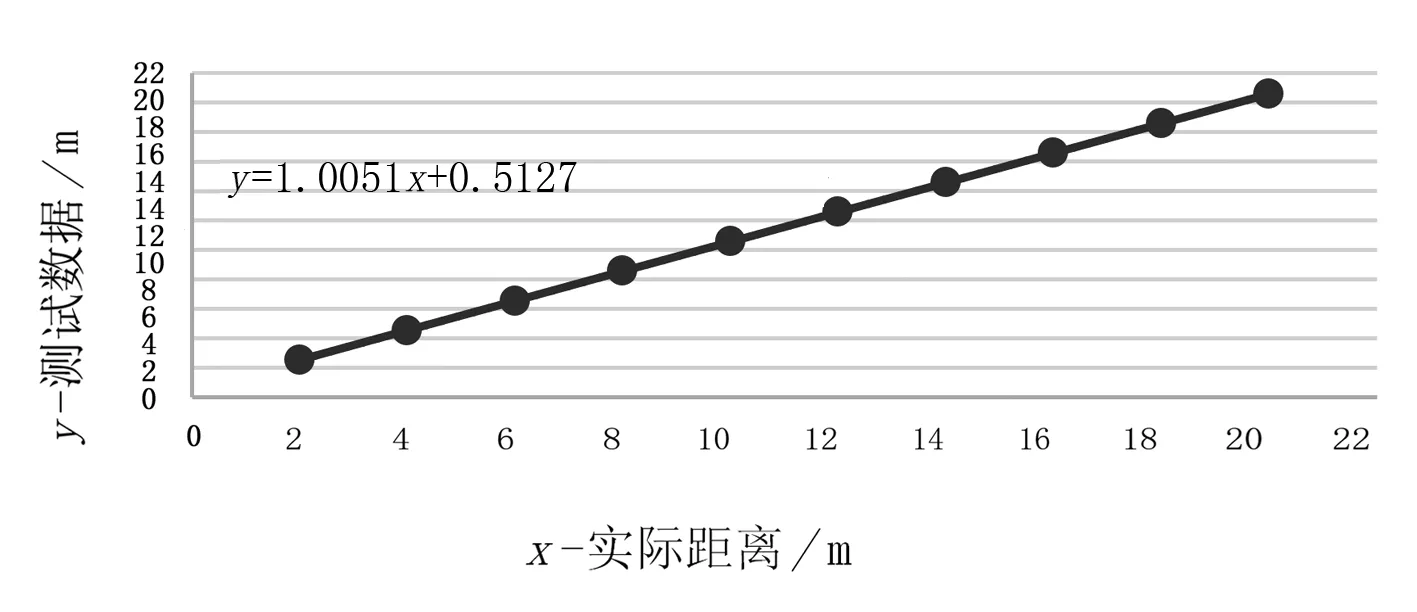
图5 数据拟合曲线及拟合公式
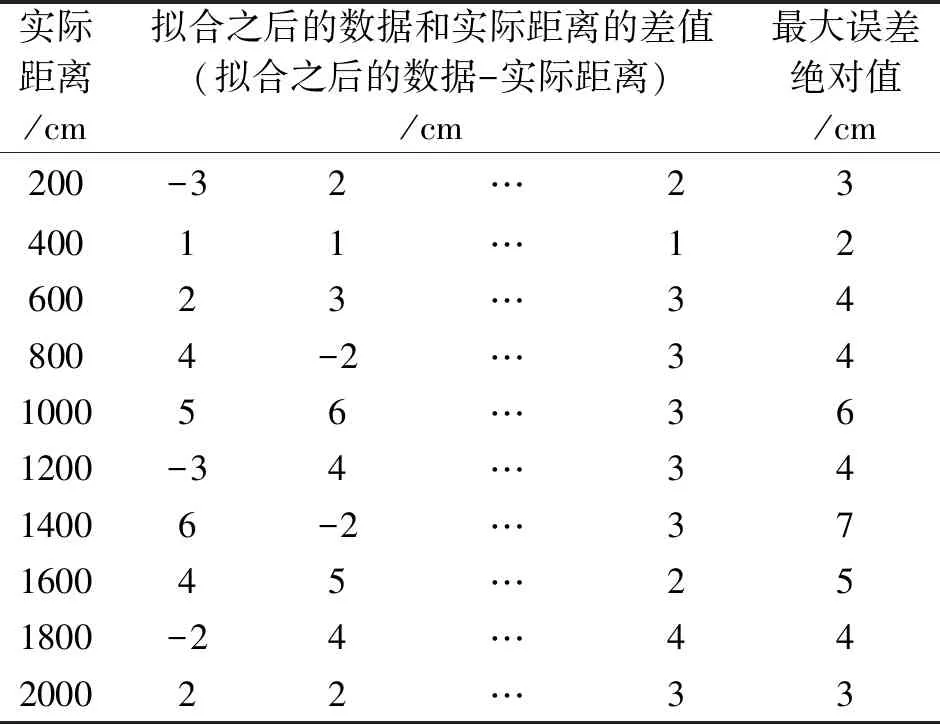
实际距离/cm拟合之后的数据和实际距离的差值(拟合之后的数据-实际距离)/cm最大误差绝对值/cm200-32…2340011…1260023…348004-2…34100056…361200-34…3414006-2…37160045…251800-24…44200022…33
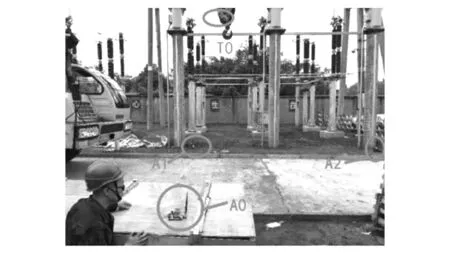
图6 某220 kV变电站现场应用

表5 某220 kV变电站现场实验数据
为进一步分析误差数据的合理性,对其误差值采用单因子二项分析[5],分析结果如图7所示。从图中可以看出,其样本误差值比率均在0.133%~1.767%之间,进一步论证数据满足要求,能够在现场得以应用推广。
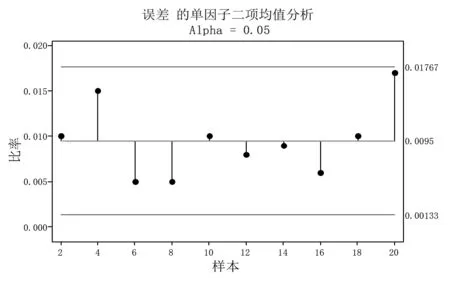
图7 误差二项均值分析
4 结 语
通过单片机技术与运动物体测距传感器技术结合构建虚拟“口”型三维空间,研发变电站汽吊作业安全距离告警系统。根据研究成果得出以下结论:
1)虚拟“口”型三维空间建立消除了变电站阻挡物(杆塔等)对测试精度的影响,其虚拟空间根据实际需要进行调试设置。
2)对于监测随机运动物体间距离,传统超声波传感器受测试角度、精度影响满足不了现场实际需求;采用了UWB电磁波技术进行测试,测试信号不受变电站强电磁场干扰。
3)该装置在现场应用过程中,能实时采集斗臂距离虚拟空间壁面距离,并发出告警信号。
猜你喜欢
电子制作(2019年10期)2019-06-17
小学生导刊(2018年34期)2018-12-18
中国计划生育学杂志(2018年8期)2018-12-14
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
学苑创造·A版(2016年9期)2016-10-10
山东青年(2016年3期)2016-02-28
母子健康(2015年1期)2015-02-28
有色金属设计(2014年4期)2014-03-11
延河(下半月)(2014年3期)2014-02-28