
基于多传感信息融合的仓储定位追踪系统研究
2019-06-14 07:29吴佳怡
计算机技术与发展 2019年6期
吴佳怡,冯 锋
(宁夏大学 信息工程学院,宁夏 银川 750021)
0 引 言
仓储管理是企业运营中的重点,也是难点[1]。随着国民经济的迅速发展,仓库管理涉及到的信息量暴增,而传统的仓储管理方式会导致库存信息处理速度低且易出错[2],使企业难以保持高效的运转,导致企业往往会花费大量的人力财力[3]。在号召效率的今天,企业急需新的技术和方法来提高仓储管理的效率、减少仓储库存货物的出错率、优化仓储管理业务并能最大限度地减少人力财力的投入[4]。
根据调查,目前企业所使用的仓储管理方法大体分为两种,一种是基于人工记录的方法,另一种是基于条码技术的方法。基于人工记录的方法除了处理速率与准确率较低,且随着仓储货物的剧增暴露出人力成本偏高、追踪追溯困难、物资周转周期长等缺点。而条码技术的引入虽然能提升人工记录的效率与准确率,但其功能单一,已经不能满足现代企业的需求,从而制约了整个供应链的效率。这两种方式管理仓储均存在多种问题,导致企业不能够智能自动化的管理仓储。
针对这一现状,文中将多传感信息融合技术应用到仓储管理领域可让企业对仓库进行智能化、信息化的管理,实现对仓储环境信息的实时监测,预防仓储中的货物受潮、发霉等导致货物损坏,可延长仓库中存储货物的时间;而将RFID技术加入到仓储定位追踪系统中,可实现对仓库中货物的识别与管理,保证仓储管理中各个基本作业环节数据输入的速率和正确性;并能对仓储中存储的货物进行精确定位,减少在调库出库等情况下所走的重复路线,以此来提高仓储管理的效率。
1 系统总体设计
系统的总体设计如图1所示。系统采用传感器模块(如温湿度传感器)监测环境信息,通过ZigBee无线网络将信息上传到远程监控系统,使用多传感信息融合技术处理收到的环境信息,从而得到精准的环境信息,实现对仓储管理的智能控制;采用无线射频识别标签发出的信号强度,通过三边测量法计算出货物坐标,从而实现对货物的精准定位。
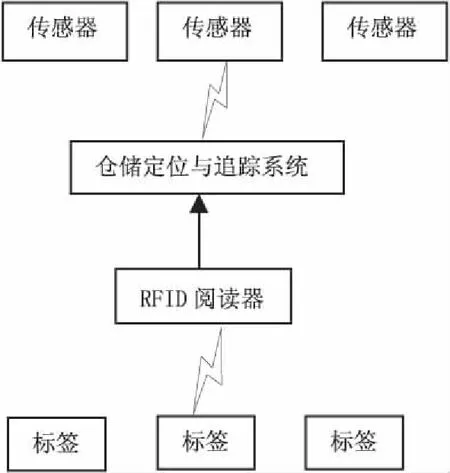
图1 仓储定位与追踪
2 模块设计
仓储定位追踪系统按照三层模块规划,根据智能仓储自动化管理要求及信息化建设标准流程,将系统分为数据感知、数据传输和数据处理三部分。
2.1 数据感知
数据感知部分负责对基本信息进行采集,在仓储定位与追踪系统中需要采集信息的环节有两大部分,分别是仓储环境参数的信息和货物的基本信息。对于仓储环境参数的信息采集,通过在仓库放置温湿度、光照强度传感器感知仓储环境基本信息;针对货物基本信息的采集,通过无线射频识别标签感知被存储货物的入库时间、出库时间、类型、状态等基本信息。仓储定位与追踪系统的数据感知所需设备如表1所示。

表1 系统信息采集
温湿度传感器采用DHT11。DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器,它应用专用的数字模块采集技术和温湿度传感技术[5],具有体积小巧、操作简单、功耗低等优点[6],确保产品具有极高的可靠性和卓越的长期稳定性。
光照度传感器采用GY-30。GY-30就是一种通用的光照度检测模块,内置模数转换电路,直接数字输出,具有光照识别范围大、功耗低、测量精度高等优点[7],适合仓储这种大而空旷的地方使用。
2.2 数据传输
数据传输模块主要负责将采集到的数据上传至仓储定位与追踪管理系统。该系统的数据传输模块需要一种短距离无线通讯。相较于其他常用的短距离无线通信(蓝牙、无线宽带、超宽带、近场通讯等),由于ZigBee协议具有低复杂度、低功耗、低速率、低成本[8]等优势,因此该系统采取ZigBee协议实现数据传输。
ZigBee无线传感网主要有三种逻辑设备类型:coordinator(协调器)、router(路由器)和end-device(终端设备)[9]。ZigBee模块采用CC2530模块,是基于IEEE802.15.4标准的关于无线组网、安全和应用等方面的技术标准[10]。协调器由CC2530核心板、CC2530底板组成,负责网络的配置、启动和维护、节点验证。路由器由CC2530核心板、CC2530底板组成,负责数据转发。终端设备由多个传感器组成,主要负责数据采集。
通常一个ZigBee网络由一个协调器以及多个路由器和终端设备组成,网络结构如图2所示。
2.3 数据处理
数据处理模块负责对收集到的数据进行处理判断,并最终输出结果。该模块主要分为两大部分,分别是仓库中货物的定位部分与仓库环境监控。
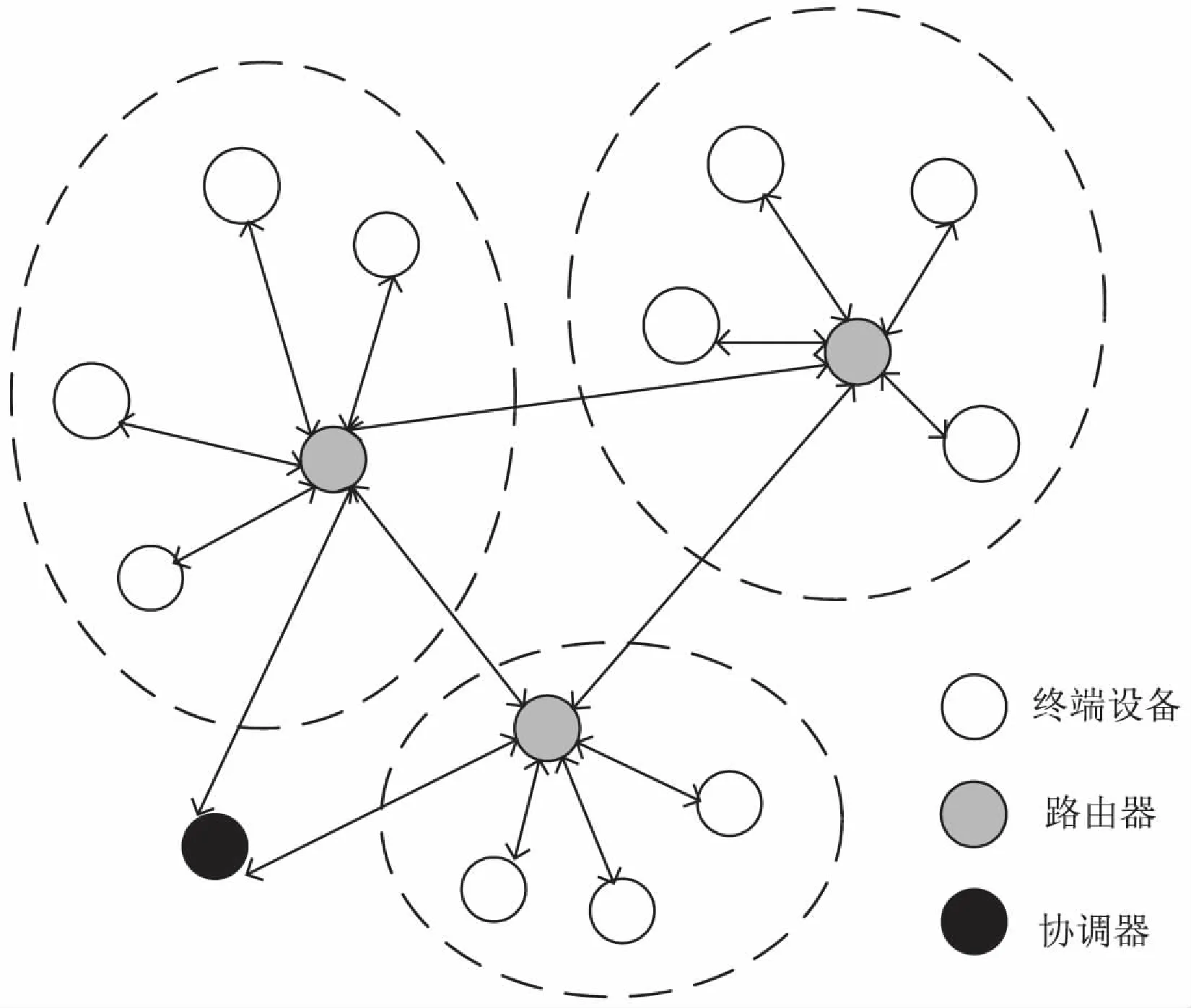
图2 ZigBee网络
针对仓库中货物的定位,原有的空间定位系统虽然很完善,但是其应用范围局限于室外。室内环境具有空间较为狭小、障碍物较多等特点,因此,原有的系统不能发挥其效用。在对比目前几种较为常用的室内定位方式的基础上,从仓储管理的具体情况出发,应用模糊数学相关理论,采用RSSI进行智能节点与待定位货物的距离估算,采用三边测量法(见图3)计算出货物的精准位置[11]。设未知货物位置坐标为(x,y),已知三个货物位置的智能节点坐标分别为(x1,y1)、(x2,y2)、(x3,y3),未知货物节点到已知货物位置的智能节点的距离分别为d1、d2、d3,如图3所示,可得:
(x-xa)2+(y-ya)2=da,a=1,2,3
(1)
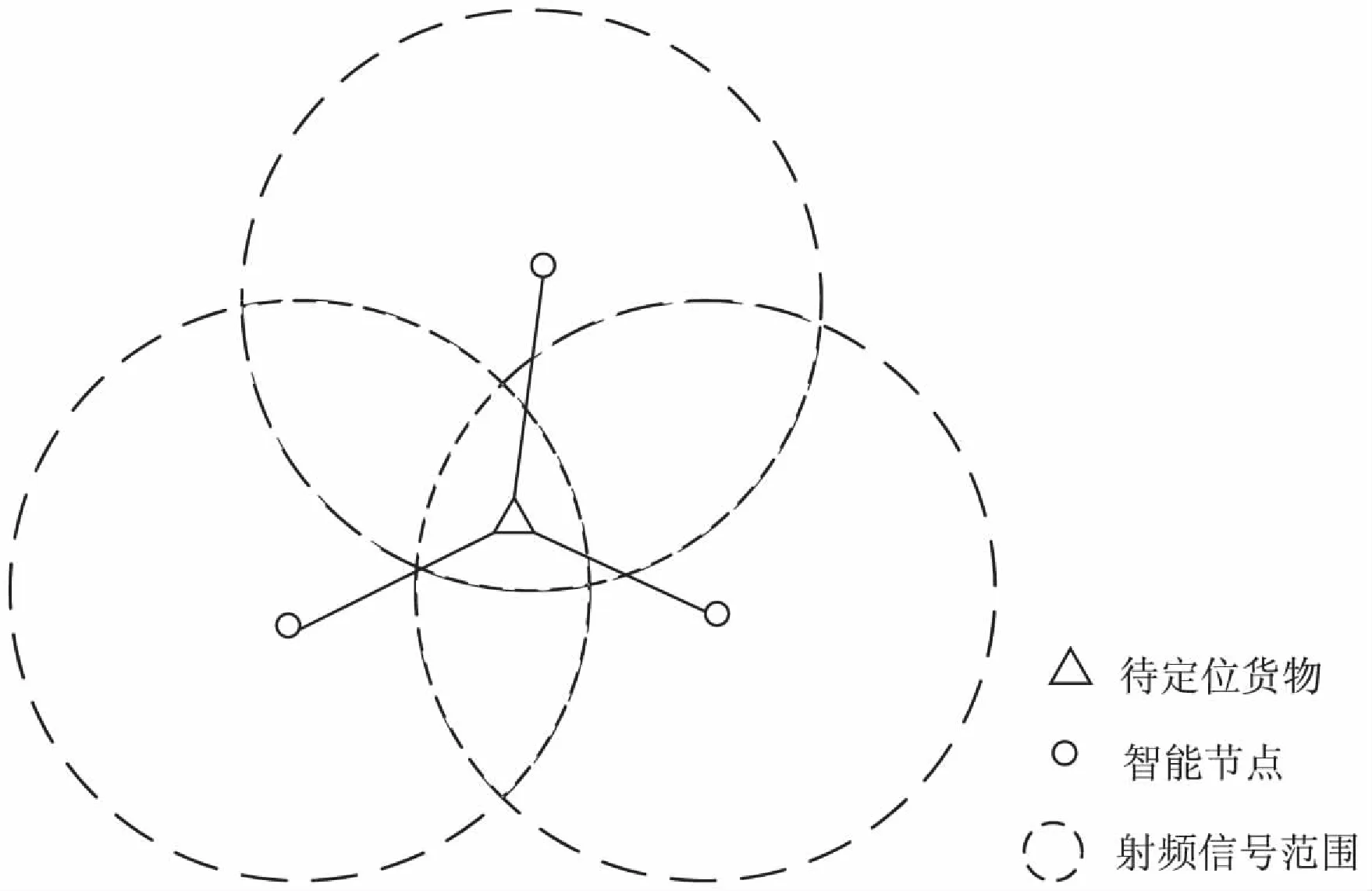
图3 三边测量法
联立方程组,即可得到未知货物的坐标(x,y),从而得到货物的精准定位。
针对仓库环境监控,由于仓储定位追踪管理系统收集到的大量环境数据并不准确,采用多传感信息融合技术进行处理。多传感信息融合(multi-sensor information fusion,MSIF)或称多传感器数据融合(multi-sensor data fusion),是20世纪70年代美国国防部[12]在开发声纳信号处理系统时,为了获得更好的水下声呐信息而提出的一种方法[13],并开始了相关技术的研究工作。多传感信息融合具有提高系统稳定性、增强系统精度、增强系统抗识别能力等优势。这种技术最初多用于军事领域,但随着传感器技术与信号处理技术的发展,多传感信息融合也在智能处理与工业化控制等领域被广泛应用。
目前为止,对于多传感信息融合的模型及融合方法,国内外并没有统一的标准[14]。各个行业都根据自己的需要制定出一套属于自己行业的融合方法,常见的有卡尔曼滤波、D-S证据推理、人工神经网络、模糊逻辑推理等方法。通过传感器采集到的大量数据,由于传感器本身的误差及放置的位置带来的误差,得到的数据会出现偏差,导致后续的控制判断不准确。所以该系统采用卡尔曼滤波算法来解决这种问题。
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声,所以最优估计也可看作是滤波过程。卡尔曼滤波的整个过程可以描述为5个公式。
(1)状态的一步预测方程:
(2)均方误差的一步预测:
(3)滤波增益方程(权重):
(4)滤波估计方程(T时刻的最优值):
(5)滤波均方误差更新矩阵(T时刻的最优均方误差):
Pt=[I-HtCt]pt,t-1。
按多传感信息融合技术的方法处理采集到的数据,得到的精确环境信息与所要求的标准数据相对比,根据差距发出相应的调节指令,灯、风扇等执行器执行命令后即可把环境调节到要求的标准,从而达到预设目的。
3 结束语
研究了基于多传感信息融合与无线射频识别技术的仓储优化定位与追踪管理系统,可实现对仓储环境的实时监测,能够保证仓储中储存的货物的质量;同时可对仓库中货物进行精准的定位,便于寻找货物并且移动,节约了人力物力;并将货物管理的基本功能实现了自动化。
根据实验表明,与传统的人工记录的仓储管理技术相比较,该系统不仅可提升处理信息的速率与准确率,还增加了其他功能,可达到智能自动控制的管理标准;与基于条码技术的仓储管理技术相比较,虽然二者在处理库存基本信息方面的效率与准确率相似,但该系统增加了快速寻找货物与智能监控仓储环境的功能,可帮助企业提升货物出入库的效率,并且可最大限度地减少因环境改变而导致货物霉变、腐蚀等问题。可大大提升管理效率,为企业节约成本,具有较高的实用价值。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
导航定位与授时(2020年5期)2020-09-23
中国外汇(2019年20期)2019-11-25
小猕猴学习画刊(2019年9期)2019-11-08
电子制作(2018年23期)2018-12-26
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
分析化学(2017年12期)2017-12-25
小天使·三年级语数英综合(2017年6期)2017-06-07
