
精密单点定位在背负式移动激光扫描系统中的应用
2019-06-06 05:31谢宏全陈岳涛刘国良李金瑞
测绘工程 2019年4期
谢宏全,陈岳涛,赵 芳,刘国良,陈 晨,卢 霞,李金瑞
(淮海工学院 测绘与海洋信息学院,江苏 连云港 222005)
随着三维激光扫描的发展,为满足不同领域的需求,各种三维激光扫描设备应运而生[1]。近几年,国内外市场上出现的背负式移动激光扫描系统结合了DGPS技术和SLAM技术(Simultaneous localization and mapping)可在移动过程中快速获取高精度定位定姿数据、高密度三维点云[2-3]。因DGPS技术必须架设基站的局限性,使得DGPS技术的应用区域受到限制。如沙漠、海洋等地区通常难以获取高精度的已知参考点来进行GPS相对定位[4]。而SLAM技术虽然可完成无GPS信号下的定位与构图,但是对特征点不明显的沙堆、土堆等物体的激光点云数据进行连续拼接时发生拼接错误率较高[5-6]。针对以上问题,本文将PPP技术引入到背负式移动激光扫描系统中进行应用试验研究,并通过传统的测量方法分别对PPP与DGPS辅助获取的点云数据成果进行精度分析。
1 PPP辅助点云数据获取
采用背负式移动激光扫描系统为徕卡Pegasus Backpacks,对苏州工业园区某小区进行了PPP辅助点云数据获取试验。规划好扫描路线后,分别在小区东南西北道路弯处布设4个两两通视的靶标,将靶标中心作为控制点。应用苏州CORS GNSS-RTK快速静态测得靶标中心苏州独立坐标系下的平面坐标与高程后,对试验区开始扫描,在扫描过程中严格按照规划路线和时间,规范操作。
1.1 移动轨迹获取
扫描结束后,首先进行徕卡Pegasus Backpacks移动轨迹解算,具体步骤如下:
1)首先将徕卡Pegasus Backpacks的POS数据里的GPS原始数据转换为gpb格式;
2)从IGS下载时延为17 h的Rapid星历产品,精度优于2.5 cm采样间隔为15 min的卫星轨道(SP3)参数和精度优于75ps采样间隔为5 min精密卫星钟差(CLK),设置KAR(Kinematic Ambigutiy Resolution)、Cycle slip等参数;
3)使用IE(Inertial Explore)软件GPS/INS紧耦合组合解算模块,选用PPP处理方法进行轨迹解算,经过对卫星钟差采样间隔进行内插和GPS与INS测量误差互相修正后得到徕卡Pegasus Backpacks移动轨迹(如图1所示)。
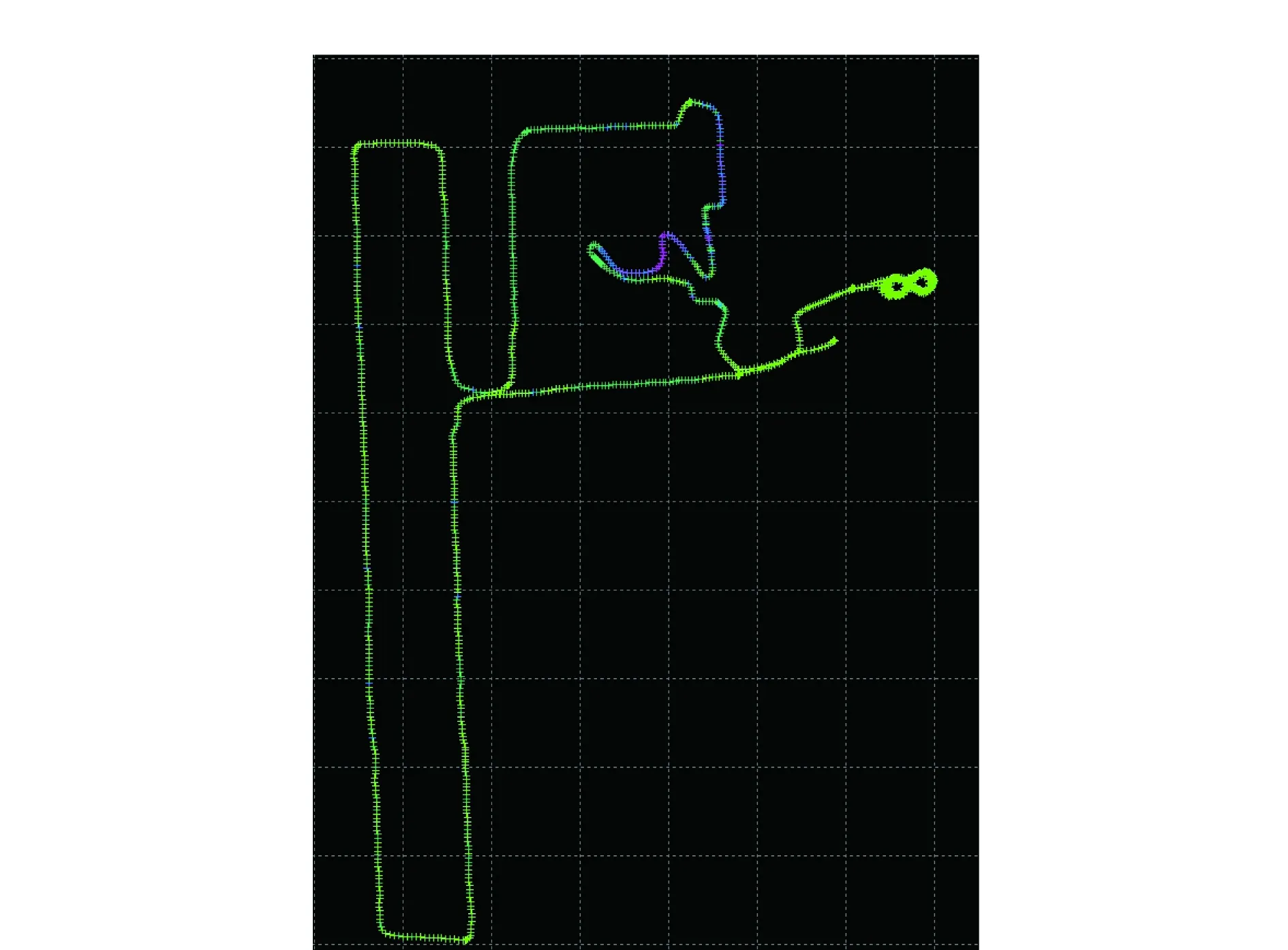
图1 Pegasus Backpacks移动轨迹
1.2 三维点云模型获取
利用PPP技术对轨迹文件进行解算后,应用Infinity软件,通过设置椭球参数、坐标转换7参数、投影方式等将激光点云的坐标系统转换成苏州独立坐标系统;应用AoTuP(AoTumatic Processing)软件,将轨迹文件和扫描文件通过GPST(GPS Time)时间对齐,生成三维激光点云数据,导出LAS格式三维点云模型(见图2)。从图2可以看出三维点云模型并没有出现点云重影、分层等现象,这说明利用PPP技术辅助获取的三维点云模型整体质量较好。

图2 三维点云模型
2 PPP内符合精度与点云质量分析
2.1 PPP内符合精度分析
使用观测值的标准差和坐标分量变化量来评价PPP方法的内符合精度或模型精度[7]。截取PPP初始化后的时间进行精度统计,坐标收敛精度随时间变化逐渐稳定[8],从图3、图4给出了每个历元坐标分量变化量和观测值的标准差可以看出,两图随GPS time波动规律大致相同,坐标分量变化量越小,其对应的观测值标准差值也越小。结合PPP固定解/浮点解统计表(见图5),当整周模糊度为固定解观测值标准差大部分都在2 cm 以内, 当整周模糊度为浮点解时观测值标准差波动较大,由此可以说明 PPP在动态定位中的整周模糊度为固定解时理论精度可以达到2 cm级的水平。

图3 坐标分量变化量
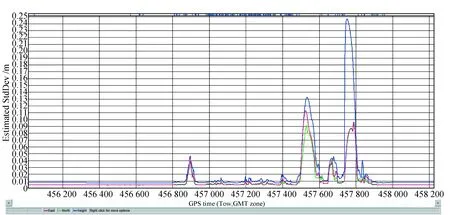
图4 观测值标准差
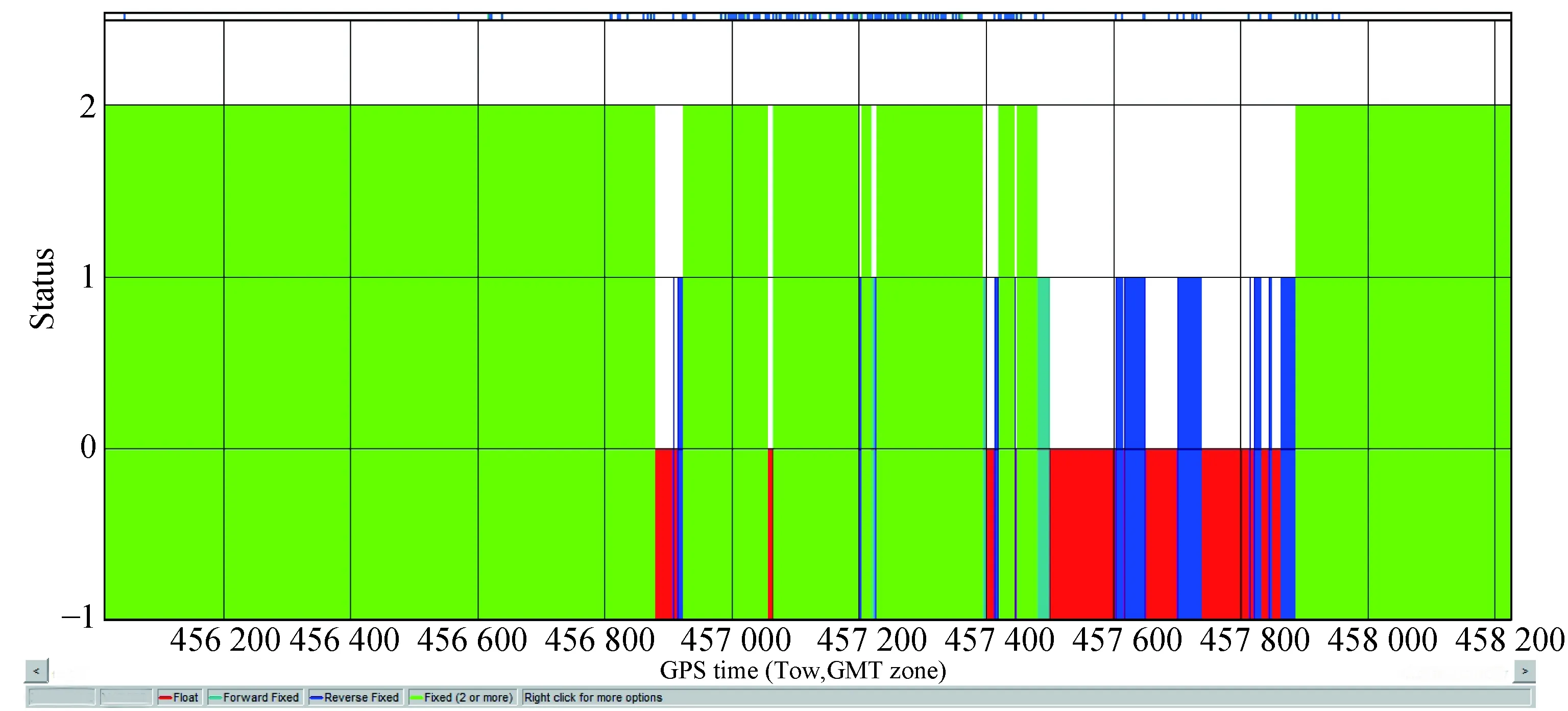
图5 PPP固定解/浮点解统计表
2.2 点云精度分析
为进一步论证PPP技术辅助移动激光扫描系统获取点云精度的可靠性。将60个靶标均匀布设到整个测区,然后将靶标中心当做检测点进行平面与高程检测[9],具体步骤如下:
1)利用GPS-RTK测得靶标中心三维坐标作为真实值;
2)使用RealWorks软件,通过布设在小区道路拐弯处的4个控制点对PPP与DGPS获取的点云数据进行平面和高程修正;
3)利用RealWorks软件分别在PPP与DGPS获取的点云模型中提取靶标中心坐标;
4)将两种方法得到的三维坐标值与真实值进行比较(见表1),利用式(1)进行两种方法获取的点云数据精度进行分析[10]。其中,m为中误差;Δ为真实值与扫描值的较差;n为检测点的个数。
(1)
由表1可知,PPP辅助获取点云数据的误差与DGPS辅助获取的点云数据误差落入的误差范围百分比基本相同。由式(1)计算可知,PPP辅助获取点云数据的点位中误差为±0.041 m,高程中误差为±0.051 m;DGPS辅助获取的点云数据的点位中误差为±0.039 m,高程中误差为±0.050 m。取两倍中误差为限差,对照表1可知粗差率也未超过5%。可见两种技术辅助获取点云数据的精度相当,所以在背负式移动激光扫描系统中PPP技术可完美代替DGPS技术。

表1 点云精度质量分析表 %
3 结速语
试验证明PPP技术应用到背负式移动激光扫描系统中是完全可行的,可为PPP技术在其他移动激光扫描设备的应用进行参考。与DGPS技术相比,PPP技术具有可以实现无地面基站精确定位、不受作业距离的限制、节省基站建设费用开支等特点。这些特点对于我国海上工程测量、偏远地区经济建设具有重要意义。本文采用的时延为17 h的Rapid星历产品虽然满足背负式移动激光扫描系统的精度要求,但与DGPS技术相比时效性还是存在很大差距。未来随着实时PPP技术的不断发展,GPS初始化时间将逐渐变短,动态定位精度不断提高,PPP技术取代DGPS技术必将成为未来发展趋势[11]。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
四川农业与农机(2020年3期)2020-08-07
读友·少年文学(清雅版)(2020年3期)2020-07-24
世界农药(2019年3期)2019-09-10
陕西农业科学(2019年4期)2019-05-13
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
江苏农业科学(2017年4期)2017-05-08
光学精密工程(2016年4期)2016-11-07
