
复合电源纯电动汽车整车控制器设计
2019-06-03 03:39周美兰严文淼郭金梅
哈尔滨理工大学学报 2019年2期
关键词:纯电动汽车
周美兰 严文淼 郭金梅
摘 要:整车控制器是纯电动汽车的核心部件,将复合电源纯电动汽车中的整车控制器作为研究对象。分析了整车控制系统的组成,设计了复合电源的结构,制定了复合电源的工作模式与能量管理控制策略,设计了基于SAE J1939标准的整车CAN通信网络,应用CRUISE软件搭建了复合电源纯电动汽车整车模型并进行仿真,验证了能量管理控制策略对复合电源能量分配的有效性。最后,搭建了整车控制器实验平台进行试验。测试结果表明,整车控制器软硬件设计可靠,复合电源能量控制策略合理。
关键词:纯电动汽车;整车控制器;复合储能;CAN通信
DOI:10.15938/j.jhust.2019.02.011
中图分类号: TM91
文献标志码: A
文章编号: 1007-2683(2019)02-0073-08
Abstract:Vehicle control unit is the key component of electric vehicle, the vehicle controller of pure electric vehicle with composite power is taken as the object of study. The composition of the vehicle control system is analyzed, the structure of the composite power is designed, the working mode and energy management control strategy of composite power is set, and the vehicle CAN communication network based on SAE J1939 standard protocol is designed. The CRUISE software is used to build the vehicle model of the pure electric vehicle with composite power. The effectiveness of energy allocation at the energy management control strategy for the composite power supply is verified. Then an experimental platform is built to test the whole vehicle controller. Experimental results show that the system design reliability of the vehicle controller and the energy control strategy rationality of the composite power is tested and verified.
Keywords:pure electric vehicle;vehicle controller;composite power;CAN communication
收稿日期: 2017-03-05
基金项目:
黑龙江省自然科学基金(F2016022).
作者简介:
严文淼(1990—),男,硕士研究生.
通信作者:
周美兰(1962—),女,博士,教授,硕士研究生导师,Email:zhoumeilan001@163.com.
0 引 言
纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能量效率高等优点成为现代汽车的发展趋势[1-2]。单一动力源的纯电动汽车在行驶过程中不可避免的要频繁加减速切换,导致动力电池出现瞬间大电流充放电,这将对电池造成损害,缩短电池使用寿命[3-5]。本文所研究的复合电源纯电动汽车,其供能系统由动力电池与超级电容构成,结合二者的优点,能有效的降低电池大电流充放电频率,减小对电池的损害,并且能进一步的提高汽车的续航里程[6-7]。
整车控制器(vehicle control unit, VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车辆安全监控等功能[8-9]。整车控制器影响着汽车的动力性能、安全与经济性、稳定性和舒适性,属于纯电动汽车中的顶层控制器[10]。国外在纯电动汽车整车控制器的产品开发中,积极推行整车控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展[11]。虽然国内各大汽车厂商基本掌握了整车控制器的设计方案,開发技术进步明显,但是对核心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低[12]。
本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对整车控制器的设计和开发展开研究。应用CRUISE软件搭建复合电源纯电动汽车整车模型,验证能量管理控制策略对复合电源能量分配的有效性。通过搭建整车控制器实验平台,验证整车控制器软硬件设计的可靠性,复合电源能量控制策略的合理性。
1 整车控制系统分析与设计
1.1 整车控制系统分析
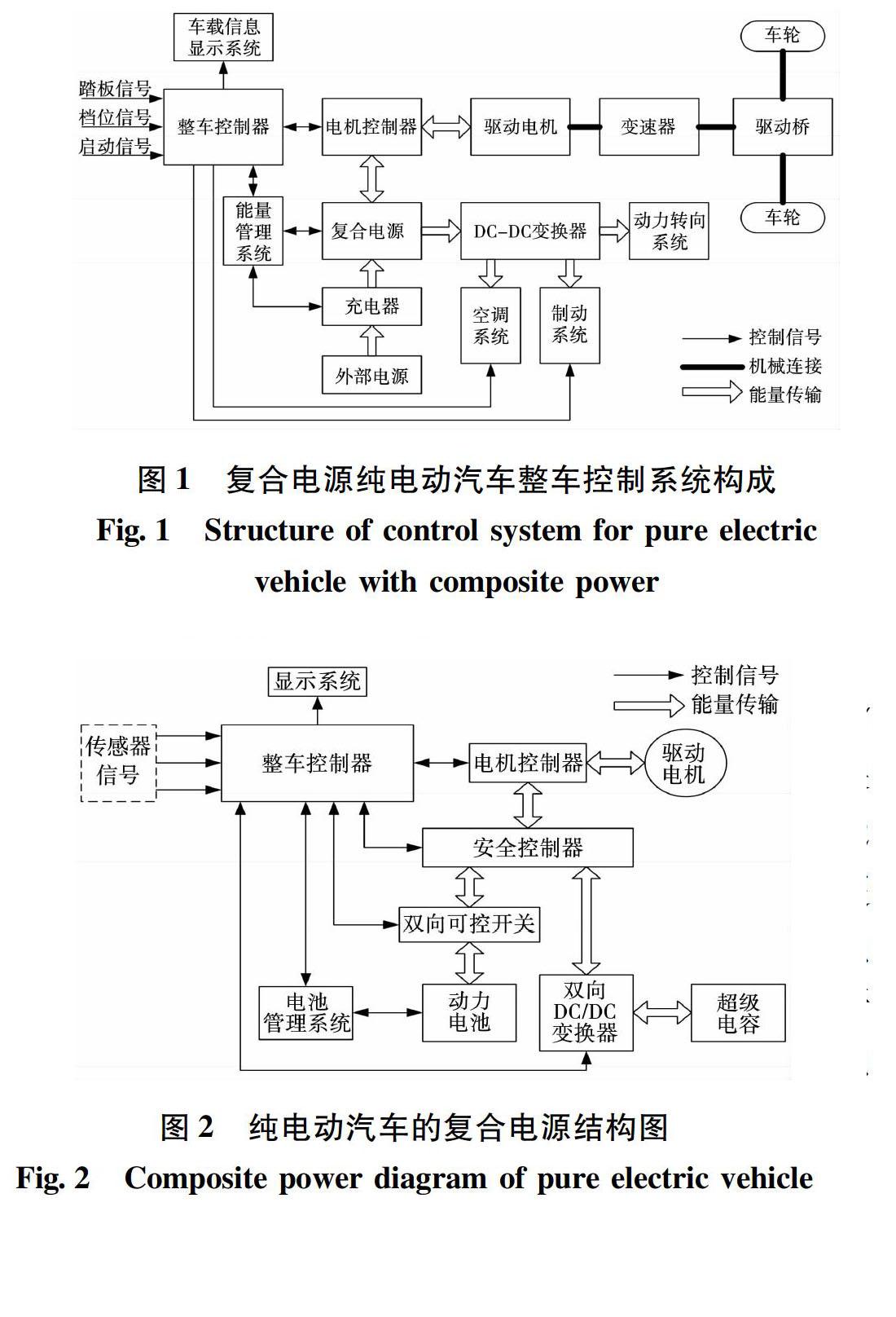
复合电源纯电动汽车整车控制系统结构如图1所示,主要由整车控制器、能量管理系统、整车通信网络以及车载信息显示系统等组成。首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统发出操控命令,并接受各子控制器做出的反馈[13]。
保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备[14]。整车控制器实时地接收传感器传输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节点的整车通信网络,实现了数据快速、可靠的传递[15]。
1.2 整车控制系统设计
复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟踪动力电池电压来调整超级电容电压,使两者电压相匹配[16]。如图2所示,为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。
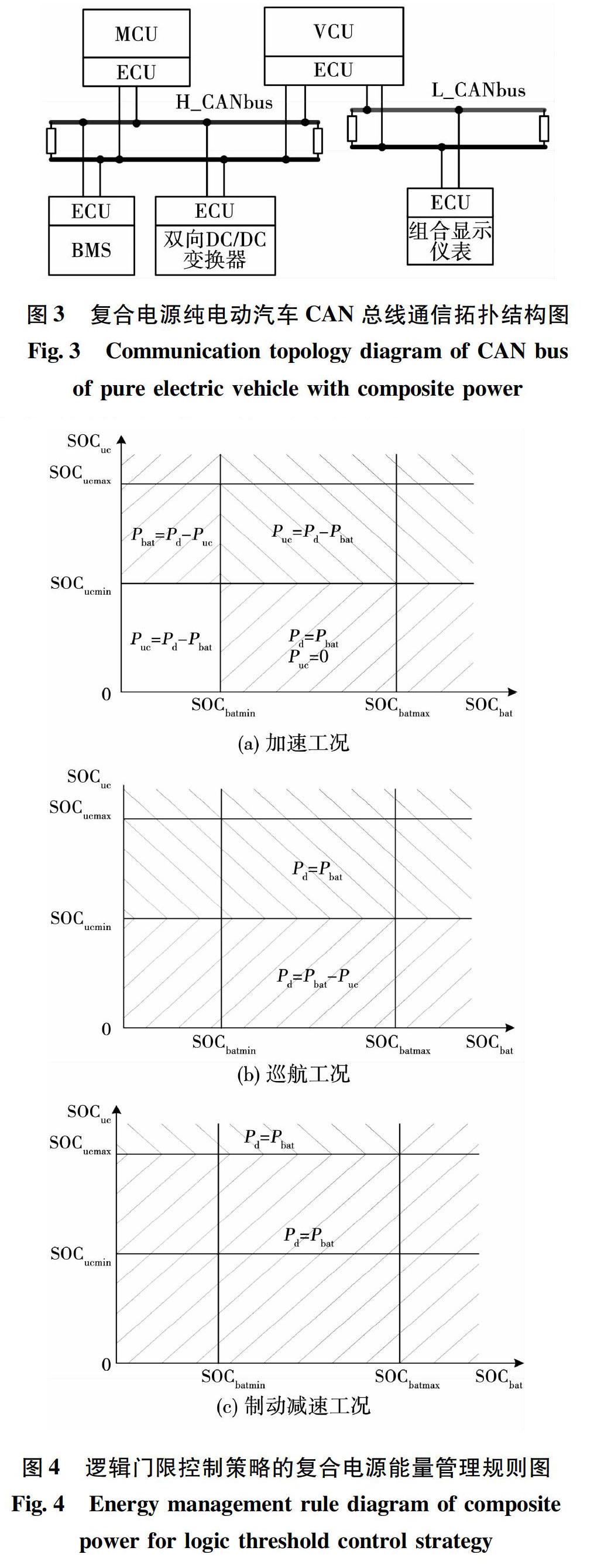
整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit, MCU)、电池管理系统(battery management system, BMS)、雙向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit, ECU)组成了复合电源纯电动汽车的整车通信网络。CAN总线通信拓扑结构如图3所示,本文设计的整车CAN通信网络服务于整车控制系统的各个部件电控单元之间的通信。
1.3 复合电源能量管理策略制定
纯电动汽车在行驶过程中,整车能量管理系统会根据车辆行驶工况的不同改变复合电源的工作模式,通过采用合理的控制策略,可以使复合电源为运行在不同工况下的车辆高效地提供能量,保障了车辆行驶的舒适性与通过性[17-18]。能量控制策略是复合电源系统的核心,能充分发挥动力电池和超级电容的优势,互相弥补对方的不足,保证电动汽车在行驶过程中具有较好的启动、爬坡、加速等动力性能和续驶里程。因此,复合电源控制策略的优劣影响着复合电源的工作效率以及电动汽车的驾驶体验与运行性能。为了使复合电源的控制简单、可靠,采用基于逻辑门限值的控制策略,来管理复合电源的能量分配。
逻辑门限值控制策略其本质是通过对超级电容的阀值进行限定以改变逻辑门值,将纯电动汽车驱动电机的需求功率和超级电容SOC作为工作模式转换区分元素,将超级电容SOC数值限定在一定区间,使超级电容满足车辆行驶性能的同时保护动力电池,避免电池大电流充放电,保证车辆处于再生制动状态时能量回馈可靠。具体的能量管理策略分为以下几种情况:
1)汽车处于启动及加速工况下,当超级电容SOC大于0.5时,由超级电容与动力电池共同向驱动电机提供功率,动力电池按平均功率输出,超出动力电池平均功率部分由超级电容提供, ;当超级电容SOC小于0.5时,由动力电池单独向驱动电机供电,此时 。当动力电池SOC小于0.2时,输出效率差,不增加能量输出。
2)汽车处于巡航工况下,当超级电容SOC小于0.5时,动力电池向驱动电机提供功率的同时,也给超级电容供能,此时 。当动力电池SOC小于0.2时,输出效率差,不增加能量输出。
3)车辆处于减速制动工况下,当超级电容SOC小于0.90时,超级电容能量吸收速度与效率比动力电池高,此时 。当超级电容SOC大于0.90时,超级电容不吸收能量,将剩余能量回馈至动力电池,此时 。当动力电池SOC大于0.9时,其充电效率差,不优先进行能量回馈。逻辑门限控制策略的复合电源能量管理规则图如图4所示。
1.4 基于CRUISE的纯电动汽车仿真分析
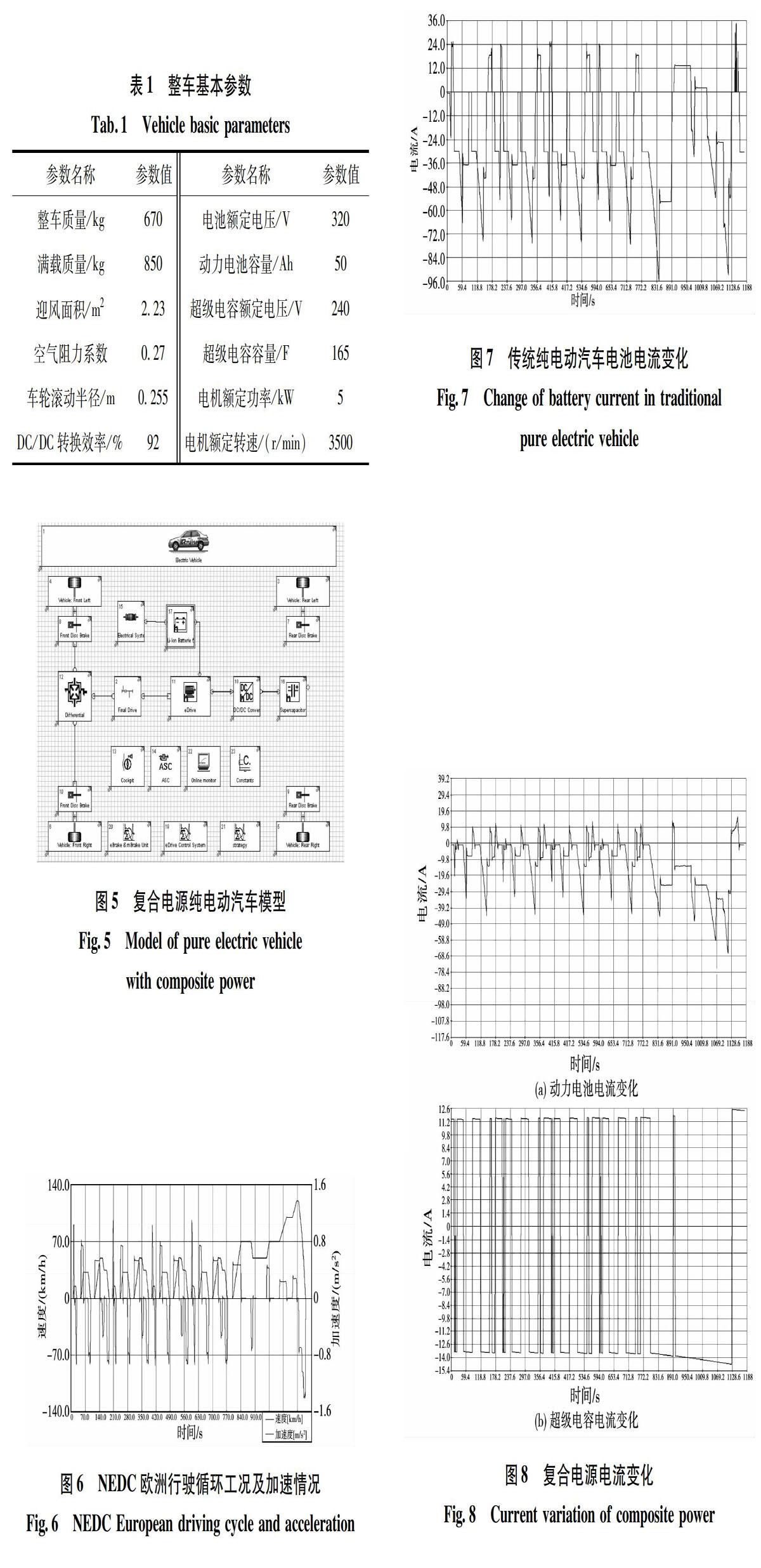
选用AVL公司开发的汽车仿真分析软件CRUISE,它采用模块化的设计方法,可以对任意结构形式的汽车传动系统进行建模和仿真[19-20]。应用CRUISE仿真软件搭建复合电源纯电动汽车模型,建立复合电源控制策略,并在欧洲城市道路工况下对所设计的复合电源控制策略进行了仿真验证。整车基本设计参数如表1所示,复合电源纯电动汽车整车模型如图5所示。
NEDC欧洲行驶循环工况以及汽车加速情况,如图6所示。可以看到NEDC工况的车速集中区域不超过60km/h。
传统的纯电动汽车采用单一动力电池供电,通过基于NEDC工况进行仿真分析,得到单电源供电的纯电动汽车动力电池输出电流变化如图7所示。由图可知,受汽车运行工况的影响,动力电池存在频繁的输入输出电流变化,电流变化范围很大,电池频繁受到大电流的冲击,对电池性能和寿命产生不良影响。
基于NEDC欧洲行驶循环工况,对复合电源纯电动汽车进行仿真,得到复合电源中的动力电池与超级电容电流变化如图8(a)和8(b)所示,当电流为负时,为放电电流,即输出电流;当电流为正时,为回馈电流,即输入电流。动力电池与超级电容SOC变化如图9(a)和9(b)所示。
由图8与图9可知,复合电源纯电动汽车相比于传统纯电动汽车,加入了超级电容可以有效的降低动力电池输出电流峰值,避免动力电池大电流充放电影响动力电池的性能和使用寿命;加速过程中,超级电容为车辆提供加速所需的额外功率,降低动力电池电流输出;在再生制动过程中,回馈能量主要由超级电容吸收。
2 整车控制器硬件设计及软件开发
2.1 整车控制器结构设计
整车控制器的硬件结构根据其基本的功能需求进行设计,如图10所示。支持芯片正常工作的微控制器最小系统是整车控制器的核心,基础的信号处理模块,CAN通信与串口通信组成的通信接口模块,以及LCD显示等其他模块分别作为它的各大功能模块。
2.2 整车控制器硬件设计
从功能上可以把整车控制器分为6个模块。
1)微控制器模块:本设计选用美国德州仪器公司TI的数字信号处理芯片TMS320F2812为主控芯片,负责数据的运算及处理,控制方法的实现,是整车控制器的控制核心。此芯片运算速度快,控制精度高的特点基本满足了整车控制器的设计需求。TMS320F2812的最小系统主要由DSP主控芯片、晶振电路、电源电路以及复位电路组成。
2)辅助电源模块:由于整车控制器的控制系统中用到多种芯片,所以需要设计辅助电源电路为各个芯片提供电源,使其正常工作,因此输出电平有多种规格。采用芯片LM317、LM337可分别产生+5V和-5V的供电电压。
3)信号调理模块:输入整车控制器的踏板信号是1~4.2V模拟电压信号,TMS320F2812的12位16通道的A/D采样模块输入的信号范围为0~3.0V,因此需要对踏板输入的模拟电压信号进行相应的调理运算,以满足DSP的A/D采样电平要求。选用德州仪器的OPA4350轨至轨运算放大器,在输入级采用RC低通滤波电路与电压跟随电路以滤除干扰信号,减小输入的模拟信号失真。开关信号先经RC低通滤波电路滤除高频干扰,再作为电压比较器LM393的正端输入,电压比较器的负端输入接分压电路,将LM393的输出引脚外接光耦芯片,在起到电平转换作用的同时,进一步隔离干扰信号,提高信号的安全性与可靠性。
4)通讯模块:TMS320F2812具有一个eCAN模块,支持CAN2.0B协议,可以實现CAN网络的通讯,但是其仅作为CAN控制器使用。选用3.3V单电源供电运行的CAN发送接收器SN65HVD232D,其兼容TMS320F2812的引脚电平,用于数据速率高达1兆比特每秒(Mbps) 的应用。依据ISO11898-2要求,在CAN总线CANH和CANL之间并联一个120Ω阻抗匹配电阻R29,以增加通信稳定性。
5)功率驱动模块:TMS320F2812输出的最高电压为3.3V,无法满足实际的汽车执行单元部件控制中对于大于等于5V驱动电压的要求。采用八路NPN达林顿连接晶体设计的功率驱动芯片ULN2803A。
6)电平转换模块:TMS320F2812数据端口输出的高电平为3.3V,无法被5V供电的LCD19264液晶显示单元中的数据端口识别接收。选用德州仪器公司生产的SN74LVC4245A对数据端口进行电平转换。SN74LVC4245A是一个八位同相总线收发器,连续输出最大电流为50mA,延时小于10ns,专用于数据总线之间的异步通信。
2.3 整车控制器软件设计
整车控制器软件按照结构化、模块化思路进行设计,采用功能独立、各自分立的形式设计程序,相互影响小,有助于程序的调试与维护。根据系统功能的实时性需求的不同,采用成熟的程序架构,对主控制程序和中断子服务程序进行任务分配,并将微控制器的软硬件中断功能进行充分利用。对于能量管理、故障诊断等实时性需求不高的功能程序,将其分配到主程序中运行。对于A/D采样、脉冲捕捉、CAN通信等实时性要求较高且具有硬件驱动功能的程序,将其按照各自的频率分配到相应的中断程序中执行。
控制软件进入不同的运行模式及工作方式,是通过对行驶过程中复合电源纯电动汽车工况与模式进行判断来决定的。软件运行控制的基础变量包括踏板开度信号、踏板开度变化率、电池SOC、超级电容SOC等信号,依次运行信号采集、处理CAN报文、处理故障、仪表显示等控制程序。复合电源纯电动汽车整车控制器的主程序软件流程如图11所示。
3 实验平台的搭建和试验结果分析
3.1 整车实验平台的搭建
实验平台如图12所示,加速信号采用霍尔式电子加速踏板作为加速信号的输入,随着踏板开度的不同其输出电压也随之变化,控制器通过内部程序检测踏板信号以判断加速状态。
复合电源由动力电池与超级电容构成,其中超级电容与双向DC/DC变换器串联,再与动力电池并联共同为驱动电机供电。动力电池采用一组赛恩斯的磷酸铁锂电池串联组成,超级电容选Maxwell的BMOD0165-P48,双向DC/DC变换器额定功率8kW,通过CAN总线进行通信,切换工作模式。
驱动电机选择高尔登HPM05KW的无刷直流电机,动力加载系统采用电力测功机,模拟电机运行过程中的负载或受力,通过工控机运行上位机软件以设定不同的阻力值与加载时间以及转速加载、转矩加载或功率加载模式,进而模拟车辆行驶过程中的工况变化。负载电机选用直流电机,以直流调速器控制负载电机运转,通过将负载电机与被测电机进行连接,可以便于进行正反两个方向实现加载,以模拟车辆不同的行驶工况。控制柜中装有电力测功机控制器与电气参数测量仪器,通过电力测功机控制柜来检测被测电机的转速、转矩与输出功率等参数,并将数据上传到工控机。通过电参数测量仪可以检测输入电压、电流以及功率等参数,并将相关数据上传到工控机。工控机通过接收控制中相关控制器上传数据,绘制相关的运行参数曲线。
3.2 试验结果分析
在实验过程中,通过控制踏板,模拟了纯电动汽车在行驶过程中的加速、巡航以及再生制动工况,利用工控机中的控制软件将采集到的数据绘制得到相应的关系曲线,通过观察相应的曲线以及相关的数据变化,来验证控制策略与控制器软硬件设计的可行性与可靠性。
加速踏板、电机转矩、转速、电流以及电压变化曲线如图13与14所示,由于本次试验采用恒转矩加载测试,因此,电机的起始转速不为零。当加速踏板开度增加时且变化时,动力电池采用恒定电流输出,超级电容输出电流增加,超级电容端电压降低较快,为电机提供额外能量,使得电机转速增加迅速。当踏板开度减小或踏板输出信号不变时,超级电容输出电流逐渐减小直至为零,动力电池输出电流逐渐增加。当踏板开度不变化或变化很小时,此时电机由动力电池供电,同时动力电池输出电流随转矩变化,以保证速度稳定,超级电容不工作,其电压基本不变。在最终阶段,按下刹车键使得电机处于再生制动状态,此时动力电池停止电流输出,电机产生的制动能量优先回馈到超级电容中,使得超级电容电压呈现上升趋势。在整个试验过程中,动力电池电压下降较为平稳。
从上述实验结果可得,在车辆加速中,超级电容进行大电流放电,使得动力锂电池输出电流较为平稳,在再生制动过程中超级电容吸收制动能量,进行大电流充电,避免了动力锂电池大电流充放电,有利于对动力电池的保护,达到了对复合电源的控制要求。
4 结 论
整车控制器作为纯电动汽车中最为核心的控制组件,是整车控制系统的中心枢纽。本文深入分析了复合电源纯电动汽车整车控制系统的组成与工作原理,确定了复合电源的组成结构,完成了整车CAN通信网络设计,制定了基于逻辑门限值的能量管理控制策略,并利用CRUISE软件搭建复合电源纯电动汽车模型。最后,对整车进行了仿真分析,仿真结果表明本文所提出的复合电源能量管理控制策略是合理有效的。利用实验设备搭建整车试验平台,完成试验与结果分析,试验结果表明整车控制器软硬件设计合理,所设计的电路工作正常,从而验证了整车控制器软硬件设计的可靠性与准确性。
参 考 文 献:
[1] 蔡源,王蕴弢,汤立新,等. 低碳背景下电动汽车产业分析[J].汽车工业研究, 2014,(12):51.
[2] 辛凤影, 王海博. 电动汽车发展现状与商业化前景分析[J].国际石油经济, 2010, 18(7):20.
[4] WANG L,COLLINS E G,LI H. Optimal Design and Realtime Control for Energy Management in Electric Vehicles[J]. IEEE Transaction on Vehicles Technology,2011,60(4):1419.
[5] 宋永华, 阳岳希, 胡泽春. 电动汽车电池的现状及发展趋势[J].电网技术, 2011,35(4) :1.
[6] KOTUB Uddin, ANDREW D. Moore, ANUP Barai, et al. The Effects of High Frequency Current Ripple on Electric Vehicle Battery Performance[J].Applied Energy, 2016, 178(9):142.
[7] 周美兰, 赵丽萍. 电动汽车复合储能系统的能量控制策略与仿真[J].哈尔滨理工大学学报, 2016, 21(3):8.
[8] 童志刚, 方进, 钟崢华. 电动汽车整车控制器设计与应用[J].客车技术与研究, 2013,(3):33.
[9] 姜朋昌, 王春芳, 戴能红, 等. 纯电动汽车整车控制器开发[J].轻型汽车技术. 2015, 5(6):13.
[10]李晓林. 电动汽车整车控制系统介绍[J].科技资讯, 2012,(19):27.
[11]黄思源. 电动汽车整车控制器快速原型开发[J]. 汽车工程师, 2013(11):36.
[13]李建, 梁刚, 刘巍. 纯电动汽车的结构原理与应用探讨[J].装备制造技术, 2011,(1):108.
[14]张翔. 纯电动汽车整车控制器进展[J].汽车电器, 2011,(2):1.
[15]刘成强, 林连华, 徐海港. 电动车辆整车控制器的研发[J].农业装备与车辆工程.,2016, 54(8):13.
[16]周美兰, 田小晨, 吴磊磊. 纯电动汽车复合电源系统的建模与仿真[J].哈尔滨理工大学学报,2016,(2):261.
[17]李寿涛, 马用学, 郭鹏程, 等. 一种变逻辑门限值的车辆稳定性控制策略研究[J].汽车工程, 2015,(7):782.
[19]NIU Jigao,ZHOU Su,WANG Tinghong,et al. Cruise/Simulink Combined Simulation for Fuel Cell Hybrid Vehicles[J]. Journal of Donghua University,2010,27(6) : 747.
[20]岳凤来,张俊红,周能辉. 基于CRUISE的纯电动轿车性能仿真与试验研究[J]. 汽车工程, 2014,36(6) : 669.
(编辑:关 毅)
猜你喜欢
山东工业技术(2017年5期)2017-03-16
现代经济信息(2016年31期)2017-03-08
大陆桥视野·下(2016年11期)2017-02-28
青春岁月(2016年22期)2016-12-23
湖南大学学报·自然科学版(2016年8期)2016-10-08
科技与创新(2016年7期)2016-04-20
科技视界(2016年4期)2016-02-22
现代经济信息(2016年1期)2016-01-25
科技与创新(2015年16期)2015-08-19
中国高新技术企业(2015年16期)2015-04-30
