
浅谈冗余控制在水轮机调速系统中的应用
2019-05-31 02:42卢舟鑫常中原池成虎
水电站机电技术 2019年5期
卢舟鑫,常中原,邓 勇,池成虎,刘 欢
(中国长江电力股份有限公司向家坝电厂,四川 宜宾644612)
0 引言
在电力系统中,必须根据负荷的变化不断地调节水轮发电机组的有功功率输出,以维持机组转速(频率)在规定范围内,这就是水轮机调速器的基本任务。其中,水轮机调速器调节品质的优劣关系到水轮机调节系统的静态和动态性能,随着水电厂无人值班、少人值守的趋向性,水轮机调速系统的性能可靠度已经成为水轮机调速器调节品质的关键指标之一。
控制系统的冗余分为硬件冗余和软件冗余。其中,硬件冗余主要由两部分组成,其一是控制器本身的冗余,其二是传感器和执行器的冗余。软件冗余也由两部分组成,其一是执行次数冗余,其二是软逻辑冗余[1]。
本文基于冗余控制的可靠性分析,针对目前大型水轮机调速系统中的实际控制方式,通过调速系统控制器冗余、电源冗余、传感器冗余以及执行器冗余等,讨论分析了冗余控制的必要性,对于调速器可靠性研究有着十分重要的意义。
1 冗余控制可靠性研究
可靠性是安全性的一个方面,它与系统处于危险方式下的随机故障有关。假设为单元件系统,当系统内某一元件发生故障时,是不能进行现场在线更换的,因此有必要对系统进行冗余控制。冗余系统由元件并联构成,并联的元件应具有完全一致的功能,只有这样,才能确保冗余控制的有效性。
可靠性常用的指标可用单元系统可靠度R(t)、平均无故障时间MTBF来表示[2]。
单元系统可靠度R(t)和平均无故障时间MTBF表示公式为:

其中:λ为单元件失效率。
n次冗余系统的可靠性计算公式为:

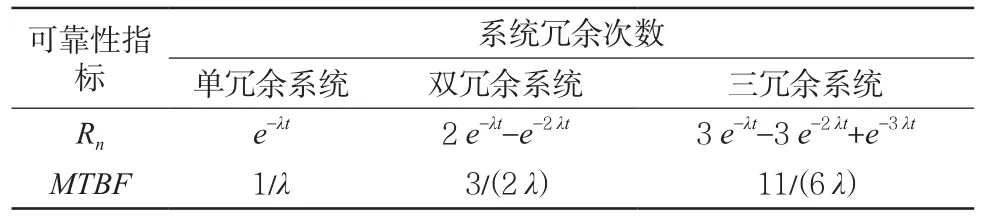
表1 冗余系统可靠性指标
由表1可知,随着冗余次数的增加,MTBF值相应增大。从单冗余系统到双冗余系统,其平均无故障时间MTBF增幅为:
(3(/2λ)-1/λ)(/1/λ)×100%=50%
从双冗余系统到三冗余系统,其平均无故障时间MTBF增幅为:
(11/(6λ)-3/(2λ))/3/(2λ)×100%=22%
由图1可知,随着冗余次数的增加,平均无故障时间MTBF增幅值明显变小,因此我们在设计系统冗余度的同时,不能无限的增加冗余次数。假设λt=0.1,并定义工作可靠度要求不小于99.9%,由公式(3)可得n≥2.937[3]。故选择三冗余系统就能很好的满足系统工作可靠度的要求。
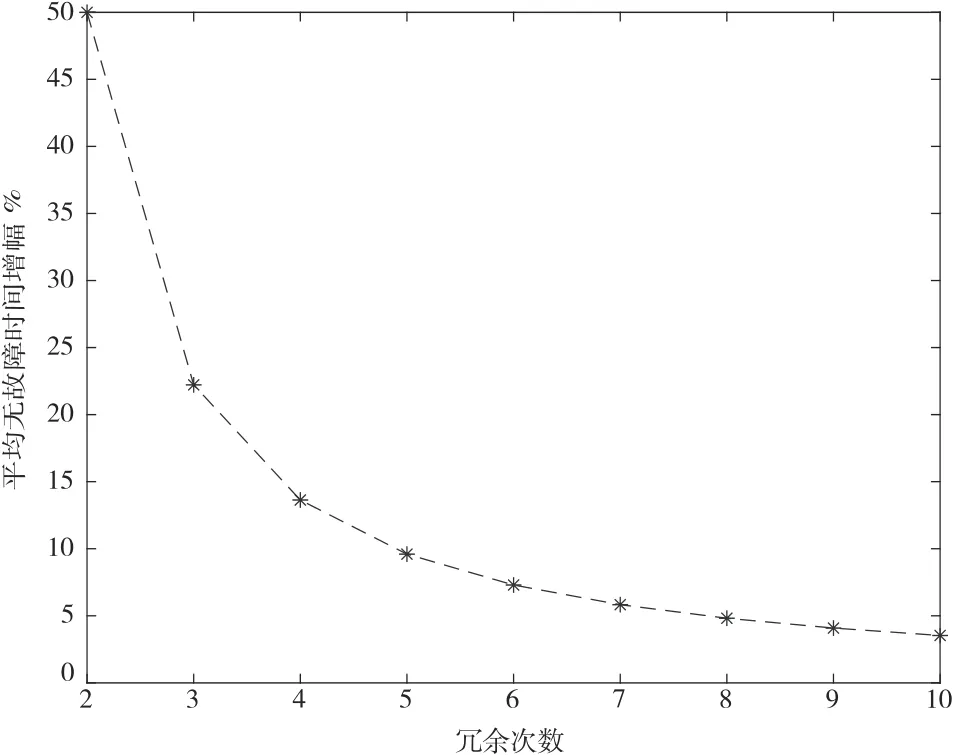
图1 平均无故障时间增幅曲线图
2 冗余设计在水轮机调速系统中的应用
2.1 微机冗余控制设计
目前大型水轮机调速系统均设计为冗余双微机调节器,其中CPU、电源模块、输入模块、输出模块、测频单元均为双冗余结构。微机调节器采用两套独立的微机控制器(A+B)实现自主调节,通过现场总线或以太网通信实现双机数据交换和双机无扰切换,切换前后调速器状态及工况保持不变,且切换前后导叶位置反馈无明显波动。
目前,冗余双微机调节系统控制策略大体相同,均采用主、备运行方式。当主机工作故障时,自动无扰切换至备用机工作,当两套控制系统均故障时,调速器自动切换至机手动运行模式,此时可以通过步进电机手轮纯手动操作导叶位置。
双微机调节器(A+B)分别与其相对应的液压系统相配合,其方式基本分为2类:步进电机式无油自复中伺服系统+比例阀伺服系统组成的电液随动系统和双比例阀伺服系统组成的电液随动系统。
2.2 电源冗余控制设计
为确保机组运行安全可靠,降低机组运行时非计划停运的风险,对调速器电源冗余的设计要求较高。针对调速器电源可靠性的问题,分别对调速器电气柜和控制柜设置了级别较高的电源冗余控制系统。
某大型水电站,调速器电气柜提出采用1交2直交叉冗余的电源配置方式,即输入电源为一路交流供电AC 220 V,两路直流供电DC 220 V,输入交直流电源220 V互为备用,开关电源交叉冗余合成控制和公共DC 24 V电源,其DC 24 V电源与外部供电电源为完全隔离,保证调速系统内部电源可靠性。双机控制实现完全独立供电,任何1套微机控制器出现电源故障,不影响另外1套微机控制器正常运行。调速器电气柜1交2直交叉冗余的电源配置如图2所示。
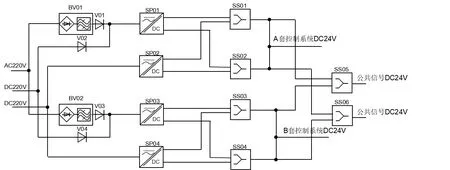
图2 一交两直交叉冗余电源配置结构图
调速器控制柜采用1交1直交叉冗余的电源配置方式,其交直流电源220 V互为备用,开关电源交叉冗余合成双套控制器电源和公共供电电源,其中,RIO远程子站配置2块可累加电源模块,配置在机架的左右两侧,进行左右冗余配置。
2.3 传感器冗余控制设计
导叶位置传感器是调速器电液随动系统执行情况的重要判据,也是调速器开度调节结果的最终反映。机组频率测量的准确性是维持机组转速(频率)在规定范围内的重要保障。故通过冗余控制实现测量环节的准确性和可靠性显得尤为重要。
某大型水电站,目前导叶位置传感器结构布置为“一对一”结构,即A套导叶位置传感器采样值上送A套控制器,B套导叶位置传感器采样值上送B套控制器,监控系统导叶位置传感器单独上送监控系统。此配置方法可以保证单套传感器故障不影响另1套传感器的数据采样,2套控制系统实现完全的相互独立。其结构图如图3所示。
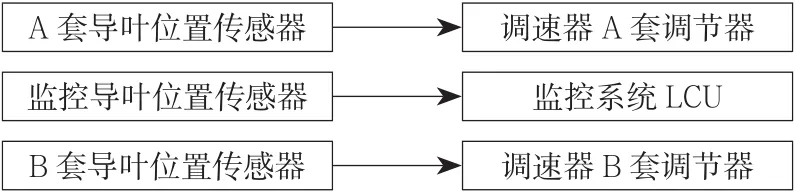
图3 导叶位置传感器配置结构图
某大型水电站,整个测频部分有4路输入:1路机端PT信号、1路电网PT信号、齿盘双探头测频信号,输出为两路测值量:机频和网率。其中机端PT信号与双探头测频信号为测量机组频率而设,它们之间相互冗余配置。机组开机时优先使用齿盘测频,另外两路测频信号作为后备,同样,机组并网时优先使用机端PT信号测频,另外两路测频信号作为后备。
2.4 执行器冗余控制设计
由于国内水电站现场液压油清洁度难以保证,因此,解决随动系统的可靠性是关键问题。因液压油清洁度的问题,可能造成调速器液压系统电液转换器件,如比例阀发卡、堵塞的现象发生,即有可能出现偶然性故障。为了使液压系统运行可靠,故采用冗余的容错控制系统,加入对液压油清洁度要求不高的步进电机控制方式,并综合比例阀形成双执行器冗余控制系统,对于大型水轮机调速系统的控制是一种适宜的选择。
对于电液转换部件的冗余 ,以比例伺服阀+步进电机为例说明具体配置:某大型水电厂,采用德国BOSCH高性能比例阀+日本三洋五相步进电机作为电液转换单元,冗余电-液转换,控制调速器的自动、电手动运行方式。
在比例伺服阀自动运行工况时,比例伺服阀是输出信号压力油的主要元件,控制主配压阀活塞运动输出压力能,来操纵接力器。在步进电机自动运行工况时,步进电机的旋转运动转换为机械的直线位移输出,驱动引导阀上下运动,通过主配压阀液压放大输出压力能,来操纵接力器。
当调速器交、直流电源发生故障时,电机直线位移转换器能保证主配压阀自复中,维持水轮机导叶在故障前的位置,并可使用纯机械手动安全停机。
3 冗余控制的建议及改进措施
3.1 微机冗余控制改进建议
目前大多数调速器控制系统均为双冗余结构,其反馈信号与控制器为“一对一”结构。调速器正常工作时,2套控制器中1套主用,另1套备用,由于二者内部程序、参数及从外部采集的数字量、模拟量信号以及频率信号完全一致,如果双机采集信息不一致,则会严重影响机组运行的可靠性。基于上述情况,通过引入触摸屏作为协处理器,对调速器电调部分主备双机采集的数字量和模拟量信号进行一致性判断,以提高数据采集和机组控制的可靠性和准确性[4]。
为了更近一步提高调速器控制系统的可靠性,可以采用交叉冗余的控制结构。通过不同控制器模块之间状态标志位进行逻辑异或判断,状态位为“1”表示该模块工作正常,状态位为“0”表示该模块故障,如若出现双机模块状态位不一致,则异或结果为“真”,表明该模块故障,通过触摸屏向操作人员报警,并进行双套控制器隶属模块的重新匹配。交叉冗余控制结构可以容忍双机隶属的不同名模块故障,通过交叉构成1套正常的控制器,使控制器能正常工作。交叉冗余控制结构如图4所示。

图4 交叉冗余控制结构示意图
3.2 传感器冗余控制改进的建议及实现
3.2.1 导叶位置传感器的冗余改造
针对目前“一对一”导叶位置传感器的结构布置,当发生传感器连接底座滑块脱落或者松动时,则可能造成双机模拟量采集信息全失效的情况,此时无法判断采集信息的真伪,进而造成机组运行可靠性大幅降低。
“三选二”控制逻辑是比较合理的选择方式,它能克服二重系统不辩真伪的缺陷,其安全性和可靠性均保持在较高的水平。
改造后的导叶位置传感器结构布置如下:将监控系统导叶位置传感器信号C通过二分器引一路至调速器控制器,再经二分器送至A、B套控制器,A、B套控制器各自均设有独立的导叶位置传感器A和B进行信号采集。“三选二”导叶位置传感器结构图如图5所示。
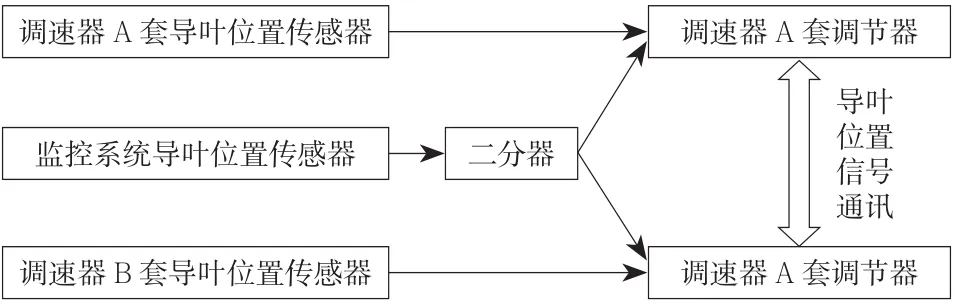
图5 “三选二”导叶位置传感器结构图
3.2.2 测频信号选择的冗余改造
某大型水电站,转速装置原程序中,当采集到某一探头信号超过1.9 Hz后,即进入转速装置开机态,此时即有转速信号输出。此种配置方法会造成机组停机,转速降为零转速后,由于传感器本体或齿带加工精度的原因,其产生的不稳定信号造成强制开机的异常结果。
通过对转速装置开/停机状态转换条件做“三选二”冗余选择处理,即在机频、齿盘1、齿盘2三路频率信号中有两路满足开/停机条件,转速装置才会进入开/停机状态,并且在停机状态执行后,屏蔽频率输出通道,以此规避因某一路测频出现异常导致转速装置异常输出的情况。通过频率“三选二”冗余选择处理后,机组运行至今均未发生过因转速跳变而造成转速装置异常开机的现象。传感器冗余选择控制逻辑流程图如图6所示。
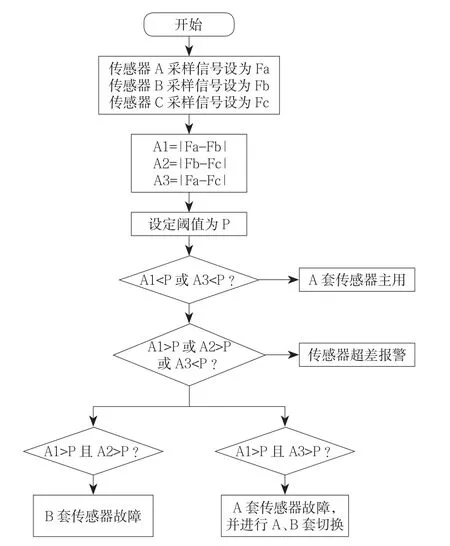
图6 传感器冗余选择控制逻辑流程图
3.3 中间元件冗余控制的改造实现
中间元件,如中间继电器、热继电器、定时器等在调速器控制回路中有着十分重要的功能。
基于某水电站实际改造为例,某水电站机组调速器电气柜停机报警输出信号和控制柜直流公用24 V电源监视为单一跳闸出口信号,该跳闸信号来源于单一继电器接点输出(继电器常励磁,常闭接点输出),存在控制电源失电或继电器故障导致设备误动的风险。
此前,该水电站调速器停机报警信号跳闸出口条件为:调速器停机报警(非并网态延时5 s或并网态非机手动控制方式延时5 s)。通过改造后,增加A、B套两路继电器接点输出,动作出口逻辑优化方法为:2套调速器停机报警信号均为1时,非并网态延时5 s或并网态非机手动控制方式延时5 s触发二类机械事故停机。通过增加中间继电器个数,采用双元件冗余控制方法,进而避免因单一元件本体故障而导致的异常事故发生。
4 结语
随着水电机组单机容量的逐步增大,相应的自动控制系统设计需求更加严格,目前绝大多数大型水电站在调速器的硬件配置上均设有冗余控制逻辑,但在控制策略上还存在着不足和急需改进的地方。本文分别对控制器冗余、电源冗余、传感器冗余以及执行器冗余配置方法进行了详细介绍,并通过改造建议和实例应用,对冗余控制的逻辑完善做了更进一步的阐述,希望对水电站调速器相关专业的维护人员有一定的借鉴意义。
猜你喜欢
柳州职业技术学院学报(2021年6期)2022-01-26
水电与新能源(2020年12期)2021-01-07
水电站机电技术(2020年8期)2020-08-28
水电站机电技术(2019年11期)2019-12-02
模具制造(2019年4期)2019-06-24
消费导刊(2017年24期)2018-01-31
电子技术与软件工程(2017年24期)2018-01-17
山东工业技术(2017年24期)2017-12-29
山东工业技术(2016年15期)2016-12-01
魅力中国(2016年7期)2016-05-14
