
康复训练装置结构设计及运动学仿真分析
2019-05-22 11:45陈岱民孟令洋史尧臣
长春大学学报 2019年4期
陈岱民,孟令洋,史尧臣
(长春大学 机械与车辆工程学院,长春 130022)
随着老龄化问题的加速,国民健康问题引起了社会和国家的关注。偏瘫患者、脊髓受损患者、中风患者和下肢肌肉力量不足患者,平衡能力下降、站立行走困难,统称为下肢功能障碍患者。传统的康复训练方法无法保证患者每次都能按照设定好的运动轨迹完成康复训练,不仅效率低、量化性差,而且在无保护措施下容易造成患者的二次伤害[1]。国外对下肢康复医疗器械领域的研究比较早,2010年,日本筑波大学的Atsushi Tsukahara研制的robot suit HAL能够帮助完全截瘫患者实现下肢的坐-站转换以达到康复训练效果[2],2015年,吉林大学刘坤等研制的悬吊式下肢康复训练系统用于辅助患者的站起康复训练[3]。本文设计了一种能够替代人工护理的装置,使下肢功能障碍患者能够按照期望的运动轨迹进行坐-站转换康复训练。
1 康复训练装置设计及工作原理
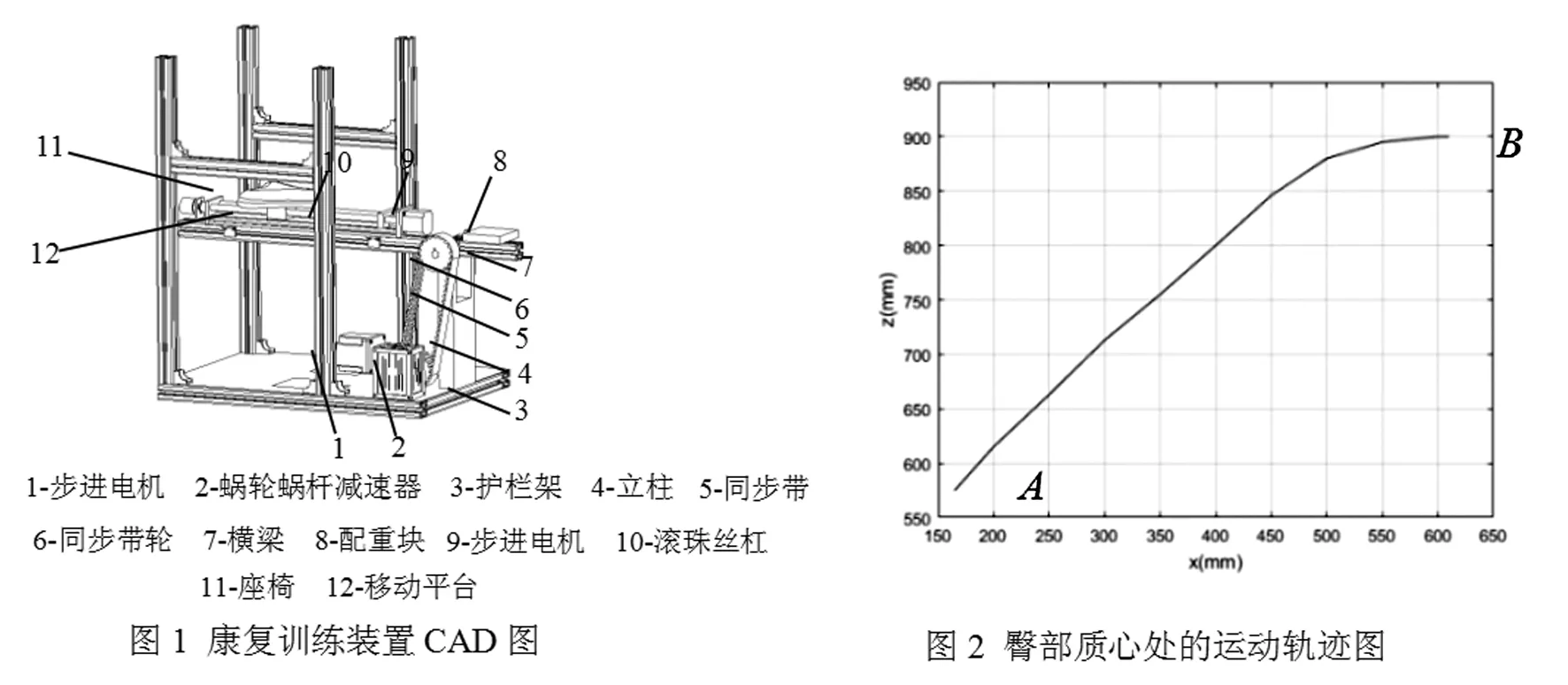
康复训练装置通过机械结构传递运动提供辅助力,支撑患者臀部按照期望的轨迹完成坐-站转换康复训练,逐渐恢复下肢关节和肌肉力量。本文设计的康复训练装置由步进电机、蜗轮蜗杆减速器、同步带传动、护栏架、立柱、横梁、座椅等组成,如图1所示。具有3个自由度,分别是在矢状面的水平运动、垂直运动和旋转运动。初始状态训练时,下肢功能障碍患者坐在装置平台护栏架内的座椅上,由步进电机驱动经蜗轮蜗杆减速器和同步带传动控制横梁作旋转运动,步进电机通过滚珠丝杠驱动移动平台上的座椅沿着横梁的方向移动,滚珠丝杠尾端的编码器用于测量移动平台的位移量,通过协调控制两步进电机使座椅处的运动轨迹和患者坐-站转换过程中臀部质心处的运动轨迹重合,以达到辅助下肢功能障碍患者坐-站转换康复训练的目的。
2 康复训练装置运动学逆解分析
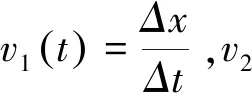
在坐-站转换过程中,下肢功能障碍患者以矢状面为对称,左右两部分的运动状态是一致的。因此,可以在平面内研究患者的坐-站转换过程。某年龄24岁,身高178cm,体重70kg的健康男子在坐-站转换过程中,臀部质心处的运动轨迹如图2所示[4],坐姿时,臀部质心在点A全站立后臀部的质心随轨迹曲线移动到点B,以此作为康复训练装置的参考运动轨迹。为了将该轨迹分解为两步进电机的运动控制,需要通过运动学逆分解将如图2所示的运动轨迹分解为坐-站转换运动时装置的旋转角速度和移动位移量。以康复训练装置底部为坐标原点,水平方向为x轴,垂直方向为z轴,对人体坐-站转换运动轨迹进行运动学逆解分析,如图3所示,则人体坐-站转换过程的合成速度为:
(1)
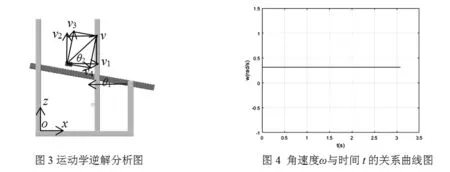
设横梁在径向平面内转动的线速度为v3,根据平行四边形法则得:
v3(t)=v(t)sin[θ1(t)+θ2(t)],
(2)
式中,θ1为横梁与水平方向的角度,θ2为v1与v之间的夹角。则横梁以回转轴心旋转的角速度为:
(3)
由图3分析得移动平台沿滚珠丝杠滑动的速度为v4:
v4(t)=v(t)cos[θ1(t)+θ2(t)],
(4)
则移动平台上座椅移动的位移量为:
x=v4·Δt。
(5)
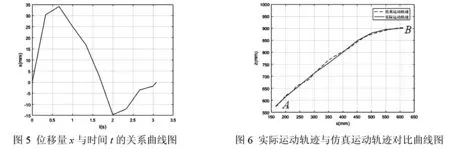
按照式(3)和(5)通过Matlab计算得到角速度ω与时间t的关系曲线如图4所示,位移量x与时间t的关系曲线如图5所示。
3 康复训练装置运动学仿真分析
为了验证运动学逆分解结果的准确性,对康复训练装置进行运动学仿真分析。为了减小计算量、提高计算速度,将康复训练装置简化为由护栏架、立柱、横梁和移动平台组成的4个刚体。根据康复训练装置各构件间的装配连接关系,在整个护栏架上添加固定副,在立柱和横梁之间添加旋转副,在横梁和移动平台之间添加移动副,将计算得到的角速度和位移量利用样条插值函数(Spline AKISPL函数)控制旋转角速度驱动和直线位移驱动。
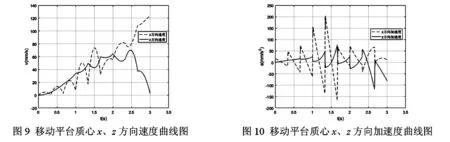
依据人体坐-站转换所需时间,设置仿真时间长为3s,步长为200进行仿真分析,仿真完成后绘制模型移动平台质心运动轨迹曲线与实际运动轨迹对比如图6所示。由图可以看出,人体坐-站转换运动轨迹与仿真运动轨迹近似重合,最大偏差小于2%。仿真过程运动轨迹如图7所示。移动平台质心水平方向x、竖直方向z的位移、速度、加速度随时间变化曲线如图8至10所示。图8表明臀部质心从坐姿处到站立处位移逐渐增大,站立点坐标为(615,900),图9表明臀部质心处x方向速度逐渐增大,最大速度达到123mm/s,z方向速度先增大后减小,最大速度达到70 mm/s后逐渐减小到0mm/s;图10表明该装置的运动过程是比较平稳的,x方向最大加速度是204mm/s2,z方向最大加速度是77mm/s2,即人体坐-站转换过程是相对较平稳的运动过程。
4 结语
本文基于康复训练装置的三维设计,通过参考人体坐-站转换运动轨迹,对其进行运动学逆解分析,得到装置的旋转角速度和移动位移量,运用RecurDyn多体动力学仿真分析,验证了此装置可以追踪人体坐-站转换运动轨迹,最大偏差小于2%,能够实现下肢功能障碍患者按照期望的运动轨迹进行坐-站转换康复训练。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年8期)2019-09-03
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年9期)2018-09-19
新商务周刊(2017年16期)2017-12-08
中国科技纵横(2015年10期)2015-12-13
应用科技(2015年5期)2015-12-09
