
“基准特征构造法”在碰撞试验车测量上的应用
2019-05-15 03:24韦永亮杨付四岳双成
汽车实用技术 2019年9期
韦永亮,杨付四,岳双成
“基准特征构造法”在碰撞试验车测量上的应用
韦永亮,杨付四,岳双成
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
文章简述了碰撞试验车在碰撞前后车身测量的常规方法。根据数值计算“最小二乘法”原理并结合碰撞试验车实际情况提出“基准特征构造”测量方法。利用若干单点以“最小二乘法”构造虚拟特征元素,依据这些特征元素建立坐标系进行试验后对比测量,在保证测量精度的同时,有效提高了碰撞试验车在碰撞试验后的测量效率。
碰撞试验车;测量;基准;特征构造
引言
近年来,随着我国汽车产业的快速发展,为了追求更高水平的汽车碰撞安全性能,各大车企均在加大汽车碰撞安全技术的研究。在碰撞试验的研究中,需要对碰撞试验前后的车身数据进行采集和分析。三坐标测量及车身三维数据扫描是行业内采集车身碰撞试验前后数据的常用方法。
三坐标测量是定量分析关键点试验前后形变量的重要手段,方法及主要步骤如下:
①碰撞试验前,在车身的目标碰撞区内标记出需要监测的“关键点”(如图1所示);
②用三坐标测量机测量“关键点”的坐标值;
③碰撞试验后,用三坐标测量机再次测量“关键点”的坐标值,并分析对比试验前后的变化。
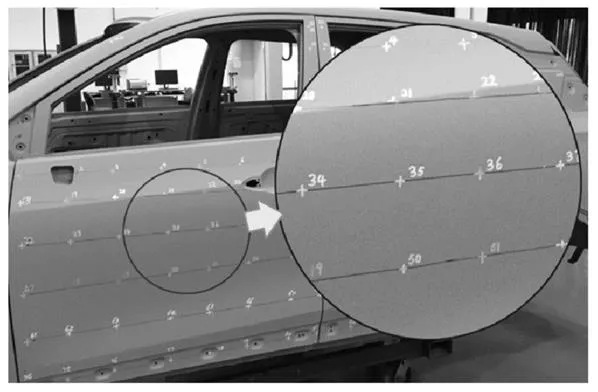
图1 侧面碰撞试验车身监测“关键点”
对于三坐标测量,碰撞试验前,测量设备可选择悬臂式测量机、便携式关节臂测量机等;碰撞试验后,选择便携式关节臂测量机进行测量。以侧面碰撞试验车为例,碰撞试验后车身产生较大形变,在车身的碰撞区域附近难以找到合适的特征元素作为测量时建立坐标系的基准。因此,在测量侧面碰撞后的车身“关键点”时,传统的测量方法是:以碰撞区域的另外一侧为基准,选择约4个基准特征,用最佳拟合法建立整车坐标系;然后,利用“蛙跳”原理将设备转移至碰撞区域进行测量。该方法在测量过程中需要进行数次“蛙跳”操作,工作效率较低。
本文以此为切入点,根据实际研发项目,在碰撞试验车测量上运用“基准特征构造法”提高碰撞试验后的测量效率。方法及主要步骤如下:
碰撞试验前,在车身碰撞区域附近(非变形区或微变型区)粘贴若干“标记点”(如图2所示),并以“标记点”为基础构造虚拟特征;利用“矩阵扩展法”将坐标系扩展到这些虚拟特征上。

图2 “标记点”
碰撞试验后,以构造的虚拟特征为基准建立整车坐标系,然后对车身“关键点”进行测量。
1 原理及理论基础
点是构成所有几何元素的基础,利用点和特定的算法可以构造出特定的特征,如圆、圆槽、方孔等。
如图3所示是平面上大致呈圆形分布的点,根据最小二乘法原理,可以将这些点拟合出一个圆,如图4所示。

图3 大致呈圆形分布的点
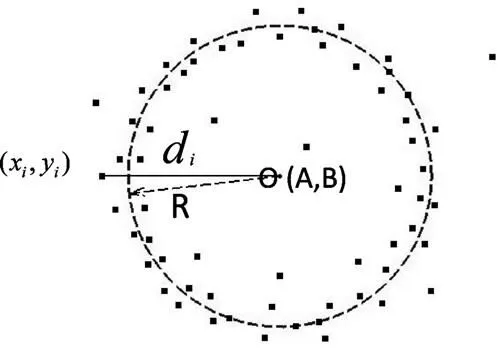
图4 利用点构造的虚拟特征圆
设根据最小二乘法拟合构造的圆,圆心为O,其坐标值为(A,B)。
则圆的曲线方程可表示为:R²=(X-A)²+(X-B)²。
设所有的点(xi,yi)i∈(1,2,3……)到圆心的距离为di。
di²=(xi-A)²+(yi-B)²。
设点到圆心距离与圆半径的平方差为Δi。
Δi=di²-R²=(xi-A)²+(yi-B)²-R²=xi²+yi²+axi+byi+c
其中:a=-2A
b=-2B
c=A²+B²-R²
构造函数F(a,b,c)=Δi²=(xi²+yi²+axi+byi+c)²
函数F(a,b,c)分别对a,b,c求偏导:
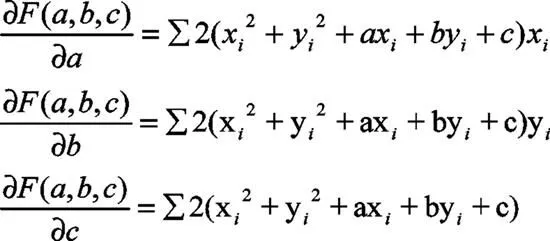
令以上三式分别等于零,建立一个三元一次方程组,可解得a,b,c的值,从而计算出圆的坐标值和直径。
在实际测量中,上述方法得出坐标值和直径,误差小、试验前后一致性好,既使部分单点产生微小位移,仍能从算法上趋于校正,构造的虚拟特征圆与实际存在于车身的特征圆在功能上相同,且在位置上更优,便于实际测量操作。
2 实施应用
2.1 在侧面碰撞试验车测量上的应用
在碰撞试验的研究中,为比较分析车身在碰撞试验前后的形变,业内通常采用三坐标测量“关键点”的方法来采集车身在碰撞试验前后的数据。在碰撞试验后,碰撞区域内的车身会产生较大变形,在此区域内的特征元素不能作为三坐标测量建立坐标系的基准,而且,在碰撞区域附近没有足够数量合适的特征可以作为建立坐标系的基准。另外,测量设备量程有限。因此,在测量碰撞试验后的车身“关键点”时,通常在远离碰撞区域的车身上寻找特征元素作为最佳拟合法建立车身坐标系的基准。以侧面碰撞试验为例,以下是针对碰撞试验后车身测量的常规方法和改进方法的对比。

图5 侧面碰撞试验后常规方法测量
①常规测量方法,如图5所示,先在车身没有因为碰撞试验产生形变的区域,选择约4个特征元素作为基准,用最佳拟合法建立整车坐标系;然后利用“蛙跳”将测量设备转移到碰撞区域进行测量。在这个过程中需要在车身上粘贴至少3个标准钢球,在这里称之为“蛙跳球”,通常使用热熔胶进行粘贴。
②“基准特征构造法”
在碰撞试验前,如图6所示,在车身碰撞区域附近(非变形区或微变型区)粘贴“标记点”,使每4至5个标记点大致呈圆形分布;根据最小二乘法原理用上述方法将“标记点”构造成若干虚拟特征圆;然后利用“矩阵扩展法”将坐标系扩展到这些虚拟特征圆上;碰撞试验完成后,以这些构造的特征圆作为基准,用最佳拟合法建立整车坐标系,然后对车身“关键点”进行测量。
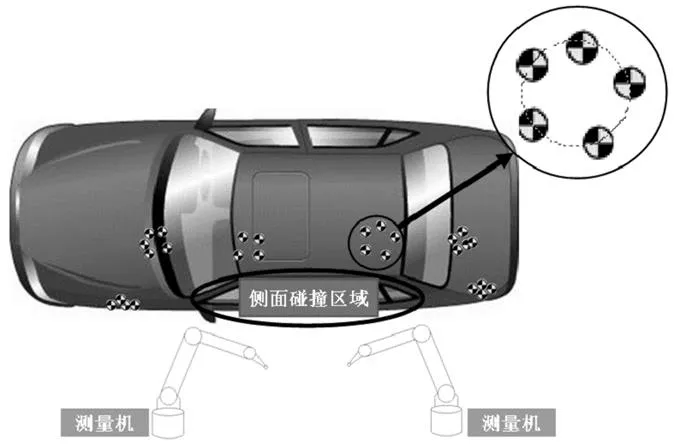
图6 侧面碰试验后“基准特征构造法”测量
2.2 在正面或偏置碰撞试验车测量上的应用

图7 正面或偏置碰撞试验后常规方法测量

图8 正面或偏置碰撞试验后“基准特征构造法”测量
在正面或偏置碰撞试验中同样存在因车身变形导致难以找到合适的特征作为建立坐标系基准的问题,用同样的方法构造虚拟特征作为建立坐标系的基准,然后对目标测量区域进行测量。图7所示为正面或偏置碰撞试验后常规方法测量示意图,图8所示为正面或偏置碰撞试验后“基准特征构造法”测量示意图。
需要指出的是:在所有的单点测量过程中,需要保持测量机测头方向与目标单点矢量方向一致,以此达到最佳测头半径补偿与曲面匹配。
和常规测量法相比,“基准特征构造法”减少了“蛙跳”过程,减少了等待热熔胶加热时间,不用粘贴“蛙跳球”,避免了来回移动设备,在保证测量数据有效精度的情况下,测量效率倍增。侧面碰撞车测量为例,表1是两种测量方法在效率与精度上的对比,传统测量方法从前期准备到测量整个过程需要50分钟到1个小时;采用“基准特征构造法”,整个测量过程仅需30分钟到40分钟。且测量精度不逊于传统测量方法。
表1 两种测量方法在效率与精度上的对比

3 小结
本文针对汽车碰撞试验研究中的车身测量,简述了测量的主要方法和具体步骤,并指出在常规测量方法中,由于车身变形给测量工作带来的不便。通过使用“基准特征构造法”在车身碰撞区域附近构造虚拟特征,用“矩阵扩展法“将整车坐标系扩展到构造的虚拟特征上,以虚拟特征为基准建立整车坐标系,从而实现对车身碰撞区域的测量。该方法的应用避免了常规方法中的”蛙跳“过程,在保证测量精度的同时使测量工作效率得到有效提升。
该方法的核心思想在于人为构造虚拟特征,亦可应用于汽车研发其它领域,如零部件、分总成等试验前后存在形变的试验。
[1]杨付四.基准“矩阵扩展法”在车身改制和现场测量中的应用[A]. 2016中国汽车工程学会年会论文集[C]. 2016.
[2] 曾喆昭.数值计算方法与MATLAB应用[M].郑州大学出版社. 2010.
[3] 李春,刘书桂.三坐标测量机的测头半径补偿与曲面匹配[J].仪器仪表学报,2003(04).
[4] 韦庆玥.三坐标测量在汽车钣金件测量中规范的研究[J].机械制造,2015(01).
The Application of "Datum Feature Structuring Method" in The Measurement of Impact Tests Vehicle
Wei Yongliang, Yang Fusi, Yue Shuangcheng
(Guangzhou Automobile Group Co., Automotive Engineering Institute, Guangdong Guangzhou 511434)
This paper gives a brief description of the conventional method of vehicle measurement before and after impact tests. According to the principle of the "least square" method and the actual situation of the impact tests vehicle, the "datum feature Structuring" method is put forward. Using several points to construct virtual feature as reference for establishing coordinate system when measuring, while ensuring the accuracy of measurement, and effectively improving the measure -ment efficiency of impact tests vehicle after impact tests.
Impact tests vehicle; measurement; Datum; Feature structuring
U270
A
1671-7988(2019)09-168-03
U270
A
1671-7988(2019)09-168-03
韦永亮(1991.8-),男,测量工程师,就职于广州汽车集团股份有限公司汽车工程研究院,从事测量研究工作。
10.16638/j.cnki.1671-7988.2019.09.054
猜你喜欢
体育教学(2022年4期)2022-05-05
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
语数外学习·高中版中旬(2021年11期)2021-02-14
好日子(下旬)(2020年6期)2020-08-04
劳动保护(2018年8期)2018-09-12
考试周刊(2018年15期)2018-01-21
故事会(2017年14期)2017-07-25
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
娃娃画报(2016年5期)2016-08-03
