
基于道路模拟试验的并联机器人MIMO自适应控制算法研究
2019-05-15 03:24李明朱留存李红博柳成季新宇
汽车实用技术 2019年9期
李明,朱留存,李红博,柳成,季新宇
基于道路模拟试验的并联机器人MIMO自适应控制算法研究
李明,朱留存*,李红博,柳成,季新宇
(扬州大学 信息工程学院,江苏 扬州 225127)
道路模拟试验系统成为现代汽车检测的主流手段,文章设计了一种基于道路模拟试验的并联机器人MIMO自适应控制算法,对其过程识别模块、系统识别模块以及控制的参数设计模块进行了简单的介绍,并通过Matlab仿真来验证算法的优势所在。
道路模拟试验;并联机器人;MIMO;自适应控制;
引言
目前并联机器人技术己成为汽车整车及零部件试验的主要手段。在试验室内,采用该技术可对被测试样进行六个自由度的振动加载,通过再现真实环境下的道路载荷的路谱试验,从而对汽车整车及零部件的疲劳可靠性等方面进行准确地评估。本文就此设计了一种基于道路模拟试验的并联机器人MIMO自适应控制算法。
1 基于道路模拟试验的并联机器人MIMO自适应控制系统的构筑
道路模拟试验系统包括主要包括计算机测控系统和并联试验台系统,根据实际系统的输入、输出数据,在一类模型中找出一个与实际系统逼近的模型,这个模型能真实地表示系统的本质特征,并通过系统权重与增益对误差函数进行不断调整,达到自适应迭代控制算法的收敛。图1是道路模拟试验系统的结构图。
MIMO自适应控制系统如下图所示,相比较于单输入输出的控制系统而言,能够更为全面、准确的得到汽车并联平台的检测信息。MIMO自适应控制系统主要包括路谱数据输入模块、极点配置模块、过程控制模块、系统识别模块以及传感器模块等几个模块。下文就过程控制模块、系统识别模块和控制参数配置模块做出介绍。

图1 道路模拟试验系统结构图
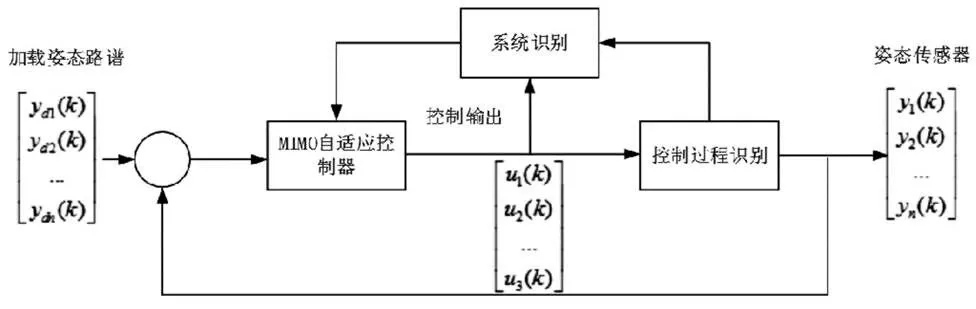
图2 MIMO自适应控制系统的结构图
1.1 控制过程识别模块
自适应控制的被控对象数学模型的参数往往是未知或时变的,因此需要对被控对象模型参数进行估计,首先应当建立参数未知的被控对象的数学模型,然后对被控对象模型的参数进行估计。MIMO自适应控制系统的被控对象可用离散时间随机非线性模型来描述,离散时间随机非线性模型具有以下形式如下:
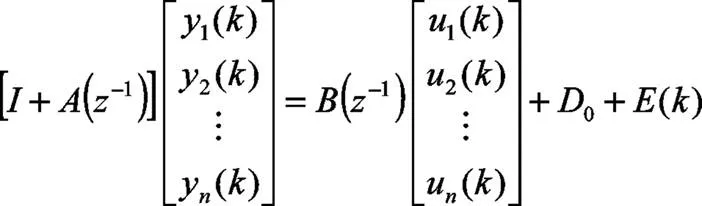
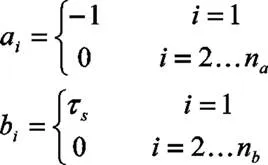
上式中,是位置传感器的输入,是电流传感器的输出,和是过程的矩阵,0是干扰,是模型的误差。在这里,不考虑过程矩阵和的参数之间的干扰。其中,+(-1)、(-1)、0以及分别可以表示为:
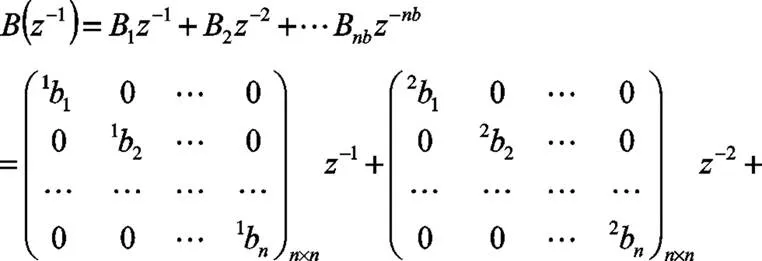
上式中,是轴数,是的多项式的维数,是的多项式的维数,是扰动的维数。另外,=××。
1.2 系统识别模块(递归最小二乘法)
在图1中,从传感器获得的数据与从系统识别获得的数据之间的误差:

接下来,考虑过程矩阵和之间的相互干扰,给出一个系统识别参数方程。
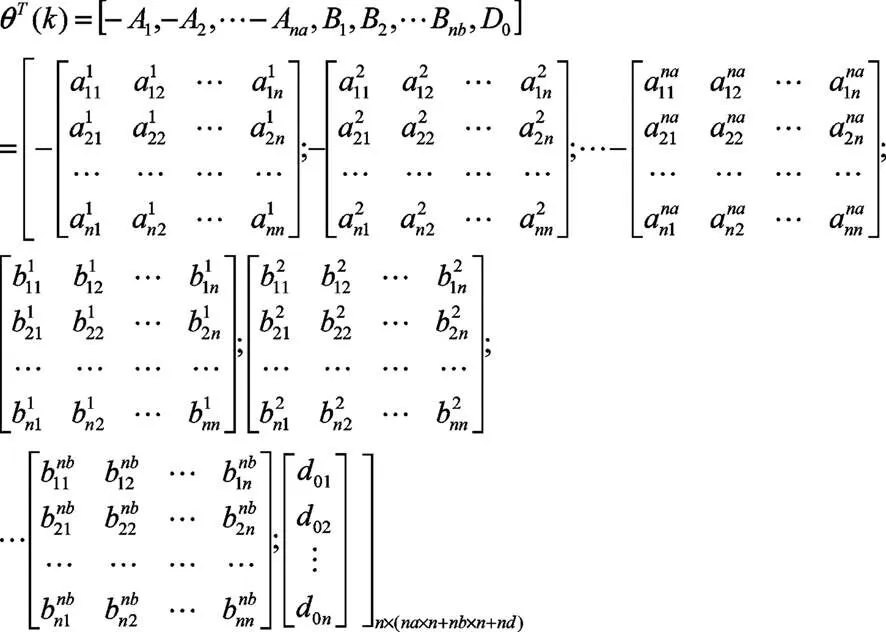
这里,是控制轴的数量。在没有前一项的识别参数的情况下,系统参数由以下等式给出作为初始数据。
这里,τ是控制器的采样频率。由此,可以获得。另外,可以基于过程模型和早期系统识别的数据获得。
系统识别算法的步骤如下:
第一步:使用过去的输入和输出数据读取()。
第二步:计算预测误差:

第四步:保存识别参数。
到目前为止,已经找到了矩阵和的新参数。
1.3 MIMO自适应控制系统的控制设计
首先,确定MIMO自适应控制系统中控制模块和过程模块参数的维数(=3;=2;=1),MIMO自适应控制系统的构架如下图所示:
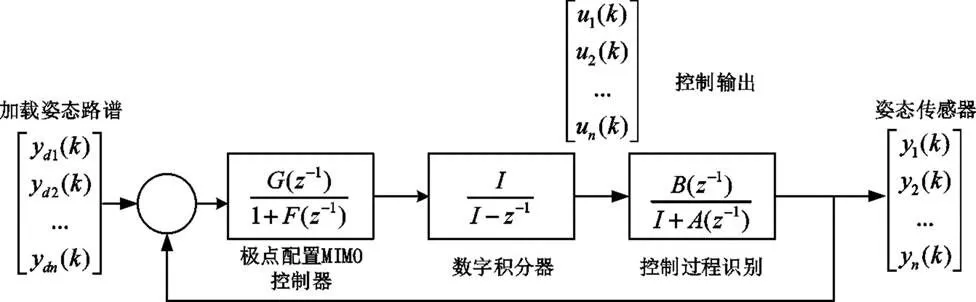
图3 MIMO自适应控制系统的控制设计
由图3可以得出()的表达式:

这里,()是控制器输出,Y()是姿态路谱输入,()是姿态传感器输入,(-1)和(-1)是调节器参数,()是闭环特征多项式,其零点是理想闭环系统的极点,()是误差。

将()的两个表达式联立起来,化简得到姿态传感器的输入表达式:
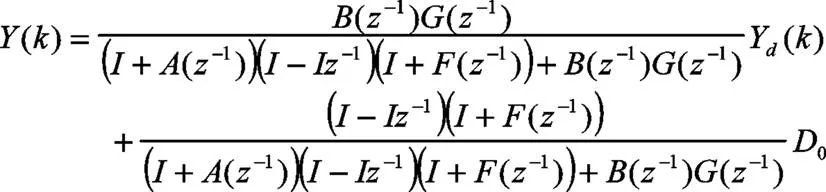
这里,极点可以由以下等式表示,其中,(-1)和(-1)是调节器的参数,(-1)是闭环特征多项式,其零点是理想闭环系统的极点,(-1)、(-1)和(-1)都是阶的方阵。
其中,(-1)、(-1)和(-1)的维数需要满足:

极点表达式为:

可以将其表示成矩阵的形式:
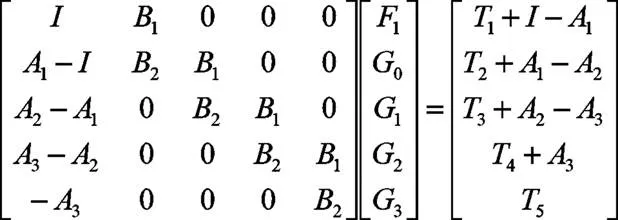
可以求出1、0、1、2、3的表达式如下:
在这里:

根据伪交换矩阵,可以得出:
由上式可以得到:

到目前为止,可以计算得到极点以及MIMO自适应控制器的控制参数,通过循环,就可以实现精确的控制。
2 仿真结果分析

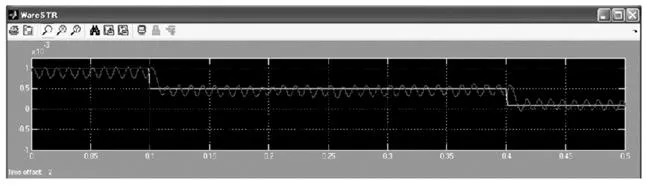
图4 P控制效果
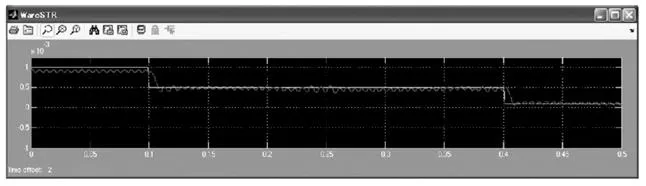
图5 PID控制效果
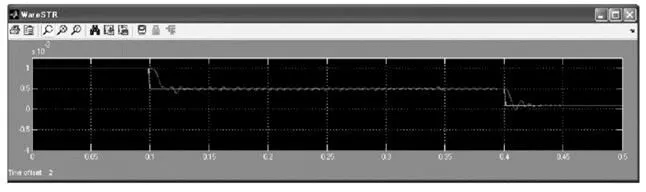
图6 MIMO自适应控制效果
上图中的黄线表示参考输入,红线表示被控对象输出,横轴是时间,纵轴是距离(这里的信号对应的是电动缸的位移量),参考输入与被控对象输出的位移差越小,说明控制效果越好,很明显可以看到MIMO自适应控制效果最好,其次是PID控制方法,效果最差的是P控制方法。从波形图分析属于主观判断,难免有所偏差,所以引进了均方误差作为客观标准来对三种控制效果进行比较,均方误差图如下图所示:

图7 P控制的均方误差
在图中,横坐标代表的是时间,设定采样时间为0.001 s,采样范围是0~2.5s,纵坐标代表的是均方误差值。图中均方误差最大的时间段反映了电动轴上力的方向和运动方向同时发生改变的场景,均方误差较大的时间段反映了电动轴上力的方向不变、大小发生改变,同时运动方向不变的场景,平缓的部分反映了电动轴上力的大小、方向不变,同时运动方向也不发生变化的场景。参考输入与被控对象输出对应了电动轴的预期位置与实际位置,误差越小,控制越理想。在电动轴力和方向保持不变时,从MIMO自适应控制的均方误差图中可以看出,电动轴的预期位置与实际位置的均方误差接近于0且保持平稳,相较于P控制以及PID控制控制效果最为理想。
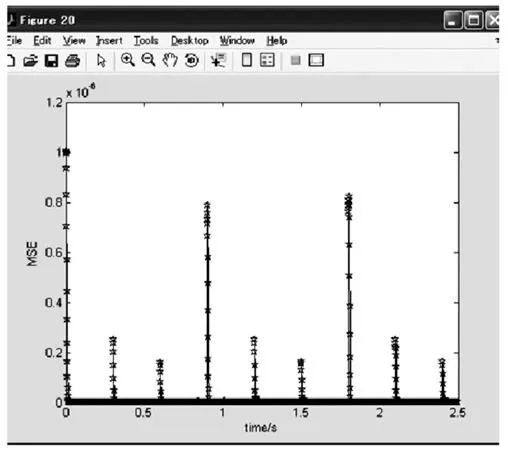
图9 MIMO自适应控制的均方误差
3 总结
工业控制对控制精度、实时性以及通用性等指标要求很高,本文设计的MIMO自适应控制系统采用闭环控制方法,进行高精度的位置和力控制,可满足试验数据高精度采集的要求。
[1] 叶纯杰.一种面向汽车检测的并联式六自由度道路模拟器的研究[D].南京航空航天大学,2014.
[2] 李成刚,丁洪生,吴平东.自适应控制在并联机床上的应用[J].机床与液压.2004.
[3] 田力军.道路模拟试验台及其控制策略研究[J].流体传动与控制. 2011.
[4] 朱龙英,成磊,郑帅,陆宝发,赫建立.基于粒子群优化神经网络自适应控制算法的并联机器人仿真研究.2014.
[5] 梁娟,赵开新,陈伟.自适应神经模糊推理结合PID控制的并联机器人控制方法.2016.
[6] 温敬召.并联机器人模型及控制策略研究.2012.
Parallel Robot MIMO Adaptive Control Algorithm Based on RoadSimulation Experiment
Li Ming, Zhu Liucun*, Li Hongbo, Liu Cheng, Ji Xinyu
(School of Information Engineering, Yangzhou University, Jiangsu Yangzhou 225127)
The road simulation test system has become the mainstream means of modern automobile detection. This paper designs a parallel robot based on road simulation test, MIMO adaptive control algorithm, and its process identification module, system identification module and control parameter design module are simple. Introduce and verify the advantages of the algorithm through Matlab simulation.
road simulation experiment; parallel robot; MIMO; adaptive control
U467
A
1671-7988(2019)09-133-04
U467
A
1671-7988(2019)09-133-04
李明(1993-),男,就读于扬州大学信息工程学院电子与通信工程专业,研究方向:物联网与传感器;*朱留存(1961-),男,教授,工学博士,研究员级高级工程师,国家千人计划,国家特聘专家,就职于扬州大学信息工程学院,从事机器人视觉研究工作。
10.16638/j.cnki.1671-7988.2019.09.044
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
环球时报(2020-08-11)2020-08-11
中国测试(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
