CCTV视觉图像处理方法在土石坝涵管病害诊断中的应用
2019-05-08 07:50宋子龙梁经纬祝志恒蒋买勇
水利水运工程学报 2019年2期
宋子龙,梁经纬,祝志恒,蒋买勇
(1.湖南省水利水电科学研究院,湖南长沙 410007; 2.中南大学,湖南长沙 410076; 3.湖南水利水电职业技术学院,湖南长沙 410131)
依据2013年水利普查数据,我国共有水库98 002座,其中90%以上为土石坝,坝下涵管作为土石坝的重要组成部分,其结构和功能的完整是土石坝安全的重要保证[1]。而目前坝下涵管存在分布广泛,数量众多,病害严重,处理困难等问题。涵管检查是评定涵管结构状态、制定维修加固方案的基本手段,是涵管维护中工作量最大的一项工作。随着科学技术的发展,一些先进的方法和设备已逐渐应用到涵管病害检查中,以弥补传统检查方法的不足。扫描设备具有检测速度快、定位精确、易复现等特点,被广泛用于隧(涵)洞检测,但由于涵管地面十分不平整、空间狭小且空气潮湿,扫描设备工作效率不高[2-3]。
国内外学者针对基于超清全景的视觉图像处理识别评价隧涵洞病害问题进行了大量工作,秦雪等[4]建立了同像素梯度数量的直方图,大大提高了图像匹配效率;王文丽[5]对各种图像采用不同边缘提取算法进行仿真实验;Jahanshahi等[6]利用高斯滤波器对图像进行预处理操作;王华夏[7]建立了一套完整的图像采集系统的方案;王平让等[8]基于裂缝提取算法提出一种适用于隧道衬砌的自动识别方法;朱鑫[9]根据图像处理的检测原理及方法,建立了一个完整的采集图像方法与裂缝检测流程;成艳枝[10]设计及研究了一套隧道衬砌裂缝的检测系统;王典泰等[11- 12]提出了基于影像展开与嵌接技术方法的隧道衬砌图像检测方法。
目前视觉图像处理技术主要用于隧洞病害检测,而涵管由于其环境的复杂性,需借助仪器设备,辅助采集图像数据。随着人工智能的快速发展,管道CCTV(Closed Circuit Television)检测技术获得青睐。该技术通过控制摄像机器人进入管道内部实时采集视频,能够全面直观地了解管道内部现状,消除人员管内作业事故隐患,已经成为涵管病害检测的重要手段[13- 15]。
本文以湖南省某水库导流低涵为对象,通过CCTV采集涵管全景视觉图像,结合多视几何三维重建技术构建涵管三维点云,再利用三维曲面估计技术判断出模型曲面,并对图像进行展平拼接,实现导流低涵渗漏、错位与腐蚀缺陷的分析评价。
1 工程概况
湖南某水库控制集雨面积15.5 km2,正常蓄水位98.7 m,原设计总库容1 897万m3,正常库容1 614万m3,是一座以灌溉为主,兼顾供水、旅游、防洪等综合效益的中型水库。其导流低涵位于大坝左端山体下,系无压明流涵管,全长150 m,纵坡1/200,进口底板高程75.00 m,出口底板高程74.25 m,设计流量2.5 m3/s。涵管断面为圆拱直墙式,宽1.0 m,高1.8 m,用预制混凝土块(40 cm×20 cm×17 cm)砌侧墙,用半圆拱混凝土块砌筑拱圈(厚15 cm),采用平面铸铁双向转动闸门,孔径0.60 m,设计水头25 m,实际使用水头8 m,门盖厚1.5 cm,5 t卷扬机启闭。
2 涵管全景图像采集
采用CCTV即“闭路电视检测系统”(图1)采集涵管全景视觉图像,通过控制器与收线车控制搭载高清摄像头的进入式机器人(车载、船载),进入涵管内部获取管道内部高清影像信息,并将影像通过线缆传输到控制台[6-7]。
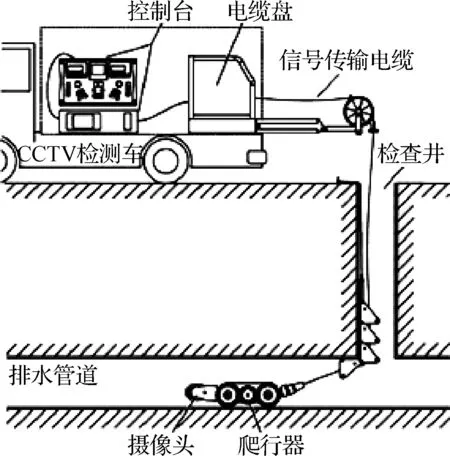
图1 CCTV检测系统示意Fig.1CCTV detection system schematic
本文采用的是某公司生产的YL-CCTV(c)型管道机器人,由控制系统(可用任意一款笔记本电脑,内置采集分析软件)、电缆盘(线缆长度150 m)、进入式机器人(IP68,最大水深10 m,适用管径:200~3 000 mm)组成,利用UPS为设备供电。导流低涵水库下游出口处(该处设0 m)为2 m深冲刷坑,CCTV检测系统需在导流低涵上部空地进行现场组装,根据导流低涵尺寸、长度,设置CCTV推进器的轮径和前进速度。在检测过程中通过调试,以8 m/min速度前进时,可平稳地采集检测相关数据,可保证获取数据的准确,由于电缆及环境限制,本次检测长度为50 m。通过控制台保存CCTV检测视频,并进行内业处理。

图2 涵管缺陷记录的时钟表示法Fig.2Clock representation of culvert defect records
在CCTV检测中,需详实记录病害的位置,以利于修复的设计与施工。由于坝下涵管结构与外形的特殊性,要完整描述病害的位置,应从两个方面进行描述,首先是在管道整体中的位置,即病害所在点距离管道起始点的位置,检测时用“距离”表述,一般记录的是CCTV检测摄像机距离检测起点(导流低涵出口处)的长度。此外,还需要表述缺陷在涵管圆周上的分布位置。在CCTV检测中逐渐形成了时钟表示法:即将涵管横断面视作一个时钟,按摄像镜头所面对的方向以顺时针时钟的位置来表述病害在圆周中的位置[5](图2):B所示的缺陷在单点位置上,标示为12;C所示的病害位置从3:00到6:00,标示为0306。
3 CCTV视觉图像处理
三维重建能恢复出实际场景的空间点云以及摄像头拍摄时镜头的内参(畸变参数)以及外参(世界坐标系下的旋转和平移参数)。利用重建出的三维点云确定一个合适的投影面,对图片进行几何矫正,就能将多视点的图像拼接问题简化为非常成熟的平面拼接问题。衬砌表面可以想象成将展开平面按照涵管的设计形状弯成的一个曲面,决定这个形状的主要是涵管横断面以及平纵面的形态。使用流线沿迹线扫掠的方法构建投影曲面模型。本文使用涵管横断面的轮廓线构建流线,使用涵管平纵线形组合构建迹线。在实际应用中,可以通过将断面轮廓或者平线形的设计曲线离散成小线段来构造流线及迹线。
模型估计的目标是找到一组合适的刚体变换参数和比例因子,使得重建的三维点云与模型曲面尽可能重叠。有了这组变换参数,就能确定采集图片的镜头位置与模型曲面间的相对位置关系,利用该相对位置关系可将单张影像正射投影至模型曲面实现几何矫正。如果将模型曲面按照一定的间距离散成点云,模型曲面估计的问题就可以看作是对两个点集进行配准。当然,使用多视几何重建出的点云与离散的模型点云配准,还需要考虑相似性问题,因为在没有地物参考的情况下,SfM(Structure from motion)方法重建出的空间点云与实际场景一般会相差一个比例。
通过SfM三维重建可以求解出照片拍摄时相机的内参以及外参,通过模型估计又求取出了三维场景到模型的变换关系,则模型格网点在照片中的位置可以通过相机投影模型求解。因此可以计算照片像素点与展开平面位置的对应关系。根据这个对应关系对原始照片进行重采样,就能将原始照片矫正到展平坐标系。
图像矫正环节已经实现了变曲为直将图像变换至展开平面,并且大致确定了每张图片在最终展开图中的位置,实现基本的接合。但还需要尽可能地消除接缝、错位和鬼影才能完美地将各张图片拼接起来。为保证接合的效果,需要图片间的重叠部分能够尽可能地对齐(平差),需要在重叠区域决定取用哪张图片的像素为最终像素(搜索最优缝合线),以及如何融合图像使得最终的拼接结果能尽可能地以算法消除图片间过度不均匀的情况。
4 涵管病害诊断
根据采集的图像进行内业处理,包括图像三维重建(图3(a))、模型对齐估计(图3(b))以及图像展平与拼接,获得了导流低涵全景数字展平图像(图3(c))。

图3 导流低涵全景数字展平图像获取
导流低涵存在明显缺陷(图4),共检测到3处明显缺陷,1级(轻度错位)缺陷点1个,错位距离出口14.54 m,错位位于管道右边墙。1级(轻度腐蚀)缺陷点1个,位于距下游出口处5.77 m左边墙中间部位。1级渗漏缺陷点1个,渗漏点位于管道右侧水平线上,距离出口23.24 m,为穿孔漏水,管壁上有明显的白色碳酸钙析出,但未见水流出。

图4 导流低涵病害诊断
5 结 语
(1) 基于CCTV视觉图像处理的土石坝涵管病害诊断方法,利用CCTV高清摄像头,可迅速完成图像数据采集,具有成本低廉,灵活性高的特点。
(2) 基于多视几何三维重建技术以及三维曲面估计技术,实现涵管图像展平,获得数字全景展平图像,可适用于各种形状和特征的涵管,具有良好的推广应用前景。
(3) CCTV视觉图像处理方法具有安全、高效、高质量等优点。具体表现为杜绝人员进入水工隧(涵)可能发生的人身伤亡事故;利用高科技提高生产力及效率,为修复、疏通、清洗方案的制订提供可靠的依据,为竣工验收、接管检查提供了科学有效的方法。
猜你喜欢
中国钼业(2022年3期)2023-01-04
舰船科学技术(2022年20期)2022-11-28
现代临床医学(2022年2期)2022-04-19
林产工业(2021年10期)2021-11-03
天津科技(2021年7期)2021-07-29
西南石油大学学报(自然科学版)(2021年3期)2021-07-16
星星·散文诗(2020年25期)2020-12-29
星星·诗歌原创(2020年9期)2020-11-06
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23