
输电线路多旋翼无人机自动驾驶智能巡检系统①
2019-04-29 08:58麦俊佳徐振磊曾懿辉
计算机系统应用 2019年4期
麦俊佳,郭 圣,徐振磊,曾懿辉
(广东电网公司 佛山供电局,佛山 528000)
1 引言
架空输电线路运行环境复杂多变,容易受到自然和人为因素破坏而导致各种故障,为了保证输电线路的安全可靠运行,电力部门制定了严格的巡视工作规范,对输电线路进行定期的巡视[1].
传统的人工巡视因受地形限制,不但危险性高、工作量大,而且效率低下,已不能满足输电线路巡检要求.有人直升机巡视虽然不受地理条件限制,具有巡线速度快的优势,但作业成本高、巡视操作难度大、作业规范性差、质量参差不齐,难以在大多数省级、地市级线路运维单位推广使用.随着多旋翼无人机的出现,其安全可靠、操作简单的特性在输电线路巡视中得到广泛应用[2].
近年来,国内外众多专家学者已对无人机电力线路巡检技术做了大量的研究.如南方电网彭向阳等对无人机电力线路安全巡检系统及关键技术进行了研究,较为全面地阐述了电力线路巡检无人直升机的技术要点[2];国家电网何惠清等探索了小型多旋翼无人机在架空输电线路巡检应用,对无人机智能巡检系统进行了描述[3].而在国外,依托已有的先进无人机技术,相关研究的重点已经转向关注后续的图像识别和数据处理等方面,如西班牙马德里大学的Campoy 等致力于计算机视觉技术应用于无人机巡线导航的研究,即利用图像处理算法和跟踪技术,在GPS 的辅助下实现无人机的巡线导航[4].虽然较多的学者已对无人机电力线路巡检技术进行了详细的分析,但大多数研究集中在人工操控无人机巡检方面,少数探索无人机电力线路智能巡检技术也缺乏对该技术进行系统的分析及应用研究.本文在学习总结国内外相关研究的基础上,进一步探索改进,提出了一种输电线路多旋翼无人机自动驾驶智能巡检系统及方法,重点介绍了巡检系统结构、功能、关键技术及应用分析,该系统的实现大大提高电网巡检效率,有效地解决了输电专业无人机巡视方面的实际问题,具有较强的实际意义.
2 系统结构
输电线路多旋翼无人机自动驾驶智能巡检系统主要由3 个部分组成,分别为智能终端、飞行平台和机巡作业平台.其中智能终端接收机巡作业平台发送的自动飞行航线信息,实现对飞行平台无人机的智能控制,同时将作业数据传输给机巡作业平台进行分析处理.飞行平台完成各种作业数据的采集,并将数据传输给智能终端和机巡作业平台.机巡作业平台根据作业数据规划自动驾驶航线,并进行后期的照片处理.系统总体结构如图1所示.

图1 多旋翼无人机自动巡检系统总体结构图
2.1 智能终端
智能终端主要用于操控无人机飞行,通过数据链路和图传链路与飞行平台实时连接,实现飞行状态监测、飞行任务管理、飞行安全检查、作业数据管理等功能.其主要包括智能匹配、杆塔数据管理、地图显示、任务管理、飞行参数显示、飞行安全检查和作业数据管理等七大功能模块.
智能匹配模块可智能匹配无人机的机型、作业的线路和杆塔名称,为作业提供了安全稳定的运行环境.杆塔数据管理模块用于储存高精度杆塔坐标、高度及输电杆塔等三维模型信息,同时该模块可与网络云端数据库互联,从而实现数据共享.地图显示模块可载入三维地图,实时查看杆塔模型、电子围栏、无人机和飞行航线.任务管理模块用于管理不同线路巡视的作业任务,作业人员只需按提醒的操作步骤执行即可完成自动巡检全过程.飞行参数显示模块可获取无人机实时飞行、相机云台和激光雷达参数,包括无人机飞行速度、距离、高度、相机曝光参数等等基础数据,并显示在智能终端.飞行安全检查模块用于检查无人机的实时位置,并控制无人机在飞行时不能进入电子围栏区域,以此保证无人机巡视作业安全.作业数据管理模块用于管理无人机的作业数据,包括作业记录数据和所拍摄照片.
2.2 飞行平台
飞行平台为无人机作业及数据采集的主要平台.系统主要采用RTK 无人机,其基于RTK 载波相位差分技术可在强电磁场中实现厘米级定位,保证了无人机作业位置和采集信息的准确性[5].其搭载的激光雷达、可见光相机和红外测温相机分别完成输电线路激光点云、杆塔坐标与高度、设备可见光相片与红外测温相片等信息的采集.
2.3 机巡作业平台
机巡作业平台是数据处理、存储与应用的主要作业平台.该平台主要包括自动驾驶模块和智能分析模块.
自动驾驶模块用于规划无人机高精度精细化巡检自动驾驶航线,对飞行平台采集的高精度点云数据进行矢量化、对象化处理,提取关键点信息,根据智能控制算法自动生成无人机高精度精细化巡检自动驾驶航线.智能分析模块用于处理无人机巡视作业数据,对无人机作业后拍摄的不同设备部件进行一一匹配、重命名及归档整理,同时对设备缺陷照片进行识别提取,整理命名,最终生成作业报告.
3 系统功能
多旋翼无人机自动驾驶智能巡检系统功能主要是在保证输电线路安全、无人机安全的前提下,实现无人机自动驾驶,进行输电线路精细化巡检,并智能分析作业数据,最终形成作业报告.系统功能流程图如图2所示.根据前期采集的高精度杆塔坐标与高度信息,系统智能终端可自动规划最优的无人机激光建模飞行路线,操控激光雷达无人机实现激光雷达自动飞行.上传高精度激光点云数据至机巡作业平台,平台依据智能算法自动规划无人机精细化巡检自动驾驶航线,将航线反馈给智能终端,即可操控RTK 无人机实现自动驾驶飞行巡视作业.上传作业数据至机巡作业平台,平台依据人工智能图像识别算法对作业照片识别提取、缺陷分类、重命名及归档整理,生成作业报告.
4 系统关键技术
随着RTK 载波相位差分高精度定位技术、高精度激光雷达建模技术和人工智能图像识别技术的成熟,为输电线路高质量智能巡检作业提供了技术条件支持,下面将阐述输电线路多旋翼无人机自动驾驶智能巡检系统关键技术.
4.1 激光雷达无人机自动驾驶建模航线控制算法
激光雷达无人机配备有RTK 载波相位差分技术、导航系统和高精度激光雷达,可在强电磁场中实现厘米级定位和导航,保证了无人机自动驾驶飞行的稳定性和精准性[5].然而人工操控激光雷达无人机进行三维建模仍然存在着难度大、风险高、作业速度不均匀、建模效果不好等问题.激光雷达无人机自动驾驶技术能有效解决人工操控建模的问题.结合雷达扫描区域和输电线路结构尺寸,包括杆塔高度、横担最大长度、最下相导线高度、走向,规划无人机自动激光雷达建模航线,激光雷达扫描示意图如图3所示.
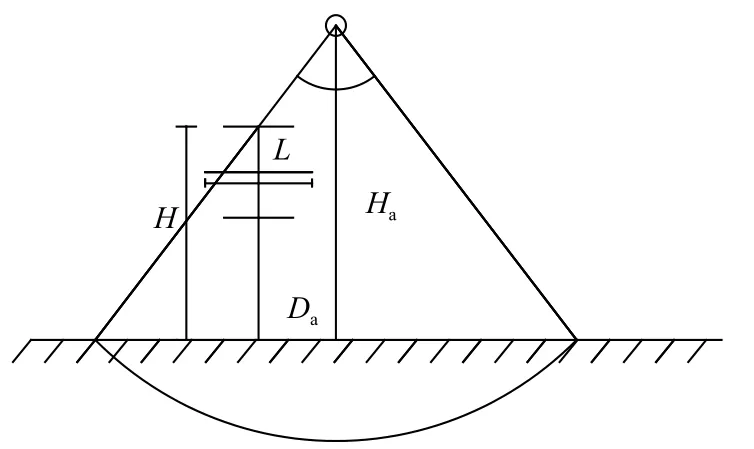
图3 激光雷达扫描示意图
为得到高质量建模效果,理论上无人机距离带电线路越近越好,虑到飞行安全,提出了无人机与输电线路线行中心保持的水平距离需满足式(1)要求:

式中,Da为线行中心与无人机保持的水平距离,单位m;L为杆塔最长横担长度,单位m;n为输电线路安全距离,单位m,对应110 kV、220 kV、500 kV 输电线路安全距离分别为5、6、8.5 米.
无人机与水平地面保持的垂直距离理论值由式(2)求得:

式中,Ha为无人机与水平地面保持的垂直距离理论值,单位m;H为杆塔结构高度,单位m;L为杆塔最长横担长度,单位m;n为输电线路安全距离,单位m;α为激光雷达开角,单位rad.
为得到最佳的建模效果,根据塔高与激光雷达射程,提出无人机飞行高度值需满足式(3)要求:

式中,h为无人机实际飞行高度,单位m;Ha为无人机与水平地面保持的垂直距离理论值,单位m;R为激光雷达射程,单位m;α为激光雷达开角,单位rad;i为飞行次数.以上高度,为激光雷达无人机建模时飞行的高度,根据雷达扫描区域范围、杆塔结构尺寸,分别规划无人机航线为单架次、双架次、三架次等作业,以使激光雷达扫描区域可覆盖整个输电线路结构.根据式(1)-(3)可计算无人机激光建模飞行的最优路线,规划路线上传至无人机,由此完成激光雷达无人机自动驾驶建模作业.
4.2 无人机自动驾驶精细化巡检航线控制算法
无人机自动驾驶精细化巡检航线主要由系统机巡作业平台规划实现.机巡作业平台可通过分析激光雷达无人机采集的高精度点云数据,提取关键点信息,计算优化,再依次组合成自动驾驶航线.输电线路的关键节点为铁塔,铁塔一般分为直线塔,转角塔,耐张塔,分歧塔,换位塔,终端塔等,每一种塔型均具有不同的空中飞行巡视路径参数,即飞机起降位置;塔脚、塔顶悬停位置;相机拍摄角度;照片拍摄数量;每相序导线、地线悬停位置等.下面以典型的四回路直线塔为例,具体说明铁塔精细化巡视路径及悬停节点.四回路直线塔自动巡检关键点设计如图4所示,结合巡视作业的塔形和设备,一共设置了16 个悬停位置关键点,无人机按照图中规划顺序依次悬停作业.不同的悬停位置调整云台相机角度,进行不同设备的巡检拍摄工作,其中悬停位置1 线路前进方向右边塔身处,可拍摄塔脚和杆塔线路名牌等设备照片;悬停位置2 至7,11 至16可拍摄导线、防震锤、绝缘子串和金具等设备照片;悬停位置8 至10 可拍摄地线、塔头和防震锤等设备照片.

为得到高质量巡检作业图片,理论上无人机距离带电线路越近越好,但虑到飞行安全,提出了选取的关键点与边导线和杆塔的距离需满足式(4)的要求:其中,l1,l2分别为在磁场干扰下,保持无人机操控系统正常工作条件下至线路两侧边导线的最小安全距离,单位m;l3,l4为在电场干扰下,保持无人机操控系统正常工作条件下至线路两侧边导线的最小安全距离,单位m;x1为允许风速条件下瞬时导致无人机偏离航点的最大距离,单位m;x2为规划航点与无人机GPS 定位仪数据实际位置的距离误差,单位m;v为无人机巡视飞行速度,单位m/s;t为无线通讯系统最长延时,单位s;a1为多旋翼无人机轴距与半螺旋桨长度之和,单位m.根据式(4)和不同的杆塔模型可计算最优的无人机悬停位置关键点,依次提取组合,由此得出无人机自动驾驶精细化巡检的最优航线,规划路线上传至无人机,即可完成无人机自动驾驶精细化巡检作业.

图4 自动巡检关键点设计图
4.3 人工智能图像识别作业数据处理方法
随着人工智能技术的发展,深度学习为输电线路作业数据智能处理提供了新的思路.无人机作业过程中有大量的图像数据需要处理,对于图像特征的提取与分类一直是无人机智能化作业领域的一个基础而重要的研究方向.卷积神经网络(Convolutional Neural Network,CNN)提供了一种端到端的深度学习模型,模型中的参数可以通过传统的梯度下降方法进行训练,经过训练的卷积神经网络能够学习到图像中的特征,并且完成对图像特征的提取和分类.收集一定量的原始数据并进行相应处理,输入到CNN 训练框架中,经过反复迭代,最终生成合格的图像识别模型.通过调用该识别程序,即可对大量的数据进行智能化分析.如图5所示,典型的卷积神经网络主要由输入层、卷积层、下采样层(池化层)、全连接层和输出层组成.
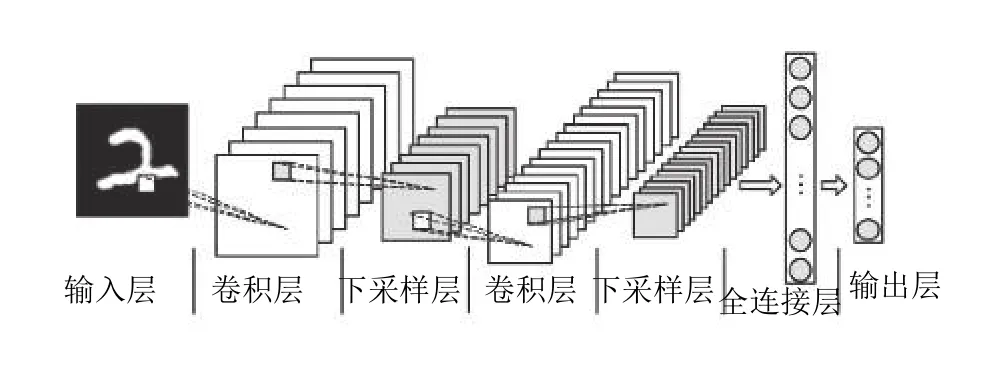
图5 卷积神经网络的典型结构
卷积神经网络的输入通常为原始图像X.本文用Hi表示卷积神经网络第i层的特征图(H0=X).假设Hi是卷积层,Hi的产生过程可以描述为:

其中,Wi表示第i层卷积核的权值向量;运算符号“ ⊗”代表卷积核与第i-1 层图像或者特征图进行卷积操作,卷积的输出与第i层的偏移向量bi相加,最终通过非线性的激励函数f(x)得到第i层的特征图Hi.
下采样层通常跟随在卷积层之后,依据一定的下采样规则对特征图进行下采样.下采样层的功能主要有两点:1)对特征图进行降维;2)在一定程度上保持特征的尺度不变特性.假设Hi是下采样层:

经过多个卷积层和下采样层的交替传递,卷积神经网络依靠全连接网络对针对提取的特征进行分类,得到基于输入的概率分布Y(li表示第i个标签类别).如式(7)所示,卷积神经网络本质上是使原始矩阵(H0)经过多个层次的数据变换或降维,映射到一个新的特征表达(Y)的数学模型.

训练过程中,卷积神经网络常用的优化方法是梯度下降方法.残差通过梯度下降进行反向传播,逐层更新卷积神经网络的各个层的可训练参数(W和b).学习速率参数(η)用于控制残差反向传播的强度:

本系统人工智能图像识别技术正是基于上述CNN深度学习框架[6-9],对现有的机巡数据进行训练,在多次训练后生成可调用模型.无人机自动驾驶作业结束后,作业数据通过智能终端管理,上传至机巡作业平台进一步分析处理.通过调用模型,机巡作业平台内置了功能完善的图像识别模型服务,可对无人机作业后拍摄的不同设备部件进行一一匹配、重命名及归档整理,同时对设备缺陷照片进行识别提取,整理命名,最终生成作业报告.这大大减少了数据处理、图片归档工作量,提高了缺陷查找的准确度,提升了工作效率.
5 系统应用实践
为验证多旋翼无人机自动驾驶智能巡检系统的有效性,对110 kV 三兴线N1-N19 塔全线进行了激光扫描建模并开展了自动精细化巡检测试.自动精细化巡检采用大疆M210 RTK 多旋翼无人机,搭ZENMUSE X4S 相机,测试线路长度全长约4.5 公里,线路位于山区,精细化巡检难度较大.
本次多旋翼无人机自动精细化巡检测试按照系统功能流程,综合运用了RTK 载波相位差分高精度定位技术、高精度激光雷达建模技术、无人机自动精细化巡检方法和人工智能图像识别作业数据处理方法,完成了110 kV 三兴线全线的自动精细化巡检作业,并最终生成了作业报告.其中智能终端任务界面如图6所示,110 kV 三兴线激光扫描建模结果如图7所示,测试共发现杆塔本体重大缺陷12 处,部分缺陷如图8所示.相比传统的人工操作无人机巡检方式,自动驾驶智能巡检大大提升了无人机的作业准确性和安全性,有效提高了无人机的作业效率,减少了数据处理工作量,保证了作业效果.具体特征对比如表1所示.
6 结语
本文针对现有架空输电线路定期巡检技术的缺点与不足,提出了一种输电线路多旋翼无人机自动驾驶智能巡检系统,重点介绍了巡检系统结构、功能流程、关键技术及应用分析.通过应用实践,证明了系统的有效性.该系统的实现有效地提高了无人机飞行的智能性、准确性、安全性,同时保证了输电线路巡检作业的高效性,提高输电线路无人机巡检效果、作业效率和安全,具有很好的应用前景.
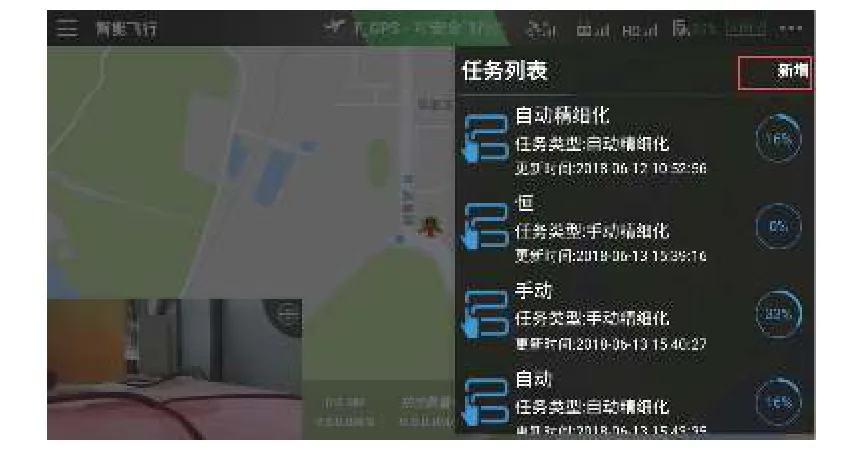
图6 智能终端任务界面
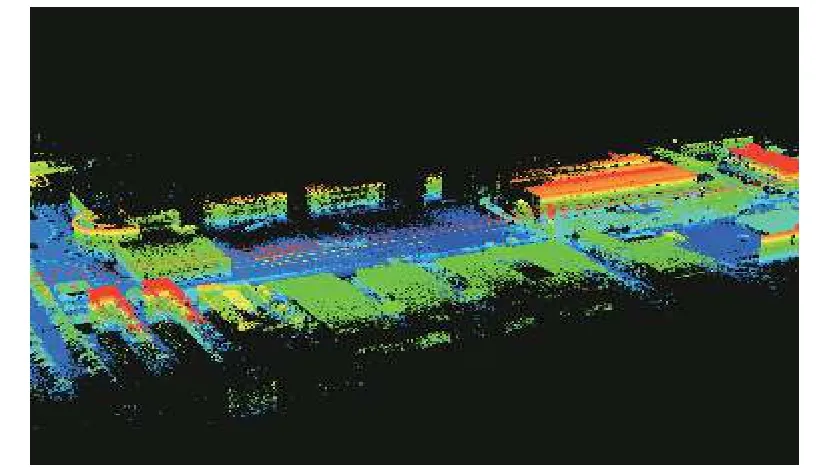
图7 激光扫描建模模

图8 部分巡检缺陷图

表1 人工操控无人机巡检与自动驾驶智能巡检方式特征对比
猜你喜欢
农业工程学报(2022年12期)2022-09-09
农业工程学报(2022年4期)2022-04-24
卫星应用(2022年1期)2022-03-09
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
机电信息(2020年12期)2020-06-29
